



《控制系统MATLAB计算及仿真》已对三种典型给定输入信号作用下的稳态误差进行了充分复习。需要特别强调,定义系统误差e(t)=r(t)-b(t),只有当H(s)=1时,e(t)=r(t)-c(t),《控制系统MATLAB计算及仿真》中的相关公式才适用。还要强调单位加速信号是 。在解算有关加速信号的题目时,要特别关注t2前的系数。
。在解算有关加速信号的题目时,要特别关注t2前的系数。
【例7-5】 对图7-4所示系统:1)当K=8、a=0时,确定系统的阻尼比ζ、无阻尼自然振荡角频率ωn与在r(t)=t作用下系统的稳态误差ess;2)当K=8、ζ=0.7时,确定参数a与在r(t)=t作用下系统的稳态误差ess;3)在保证ζ=0.7与在r(t)=t作用时ess=0.25的条件下,确定参数a与K。
解:1)当K=8、a=0时,确定ζ、ωn与ess。
①当a=0时,求Φ(s)。
clear;syms s G H a zeta omegan;G=8/(s∗(s+2));a=0;H=1;
[n,d]=numden(G/(1+G∗H));phi=simple(n/d),
程序运行后得到 。
。
②求ζ、ωn。
clear;syms s zeta omegan;
[zeta,omegan]=solve( omegan^2=8
omegan^2=8 ,
, 2∗zeta∗omegan=2
2∗zeta∗omegan=2 );
);
zeta=vpa(zeta,4),omegan=vpa(omegan,4),
程序运行后得到ζ=0.3535、ωn=2.828。
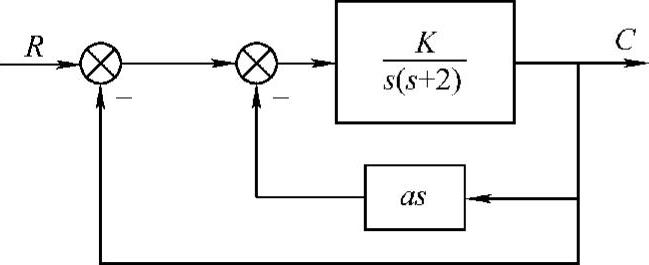
图7-4 双闭环系统
③对系统判稳。
clear;P=[128];roots(P),
程序运行结果是系统的特征根均有负实部,根据代数稳定判据,系统稳定。
④求ess。
在r(t)作用下,闭环系统误差(象函数) 。
。
clear;syms s;G=8/(s∗(s+2));H=1;xb=1;r0=0;v0=1;
a0=0;[essrr0,essrv0,essra0]=insteerr(G,H,xb,[r0,v0,a0]);
程序运行后得到essv=1/4。
2)当K=8、ζ=0.7时,确定参数a与在r(t)=t作用下系统的稳态误差ess。
①当ζ=0.7时(a≠0),求Φ(s)。
clear;syms a G H1 H phi1 phi s;G=8/(s∗(s+2));H1=a∗s;H=1;
phi1=simple(G/(1+G∗H1)),phi=simple(phi1/(1+phi1∗H)),
程序运行后得到 、
、 。
。
②求a、ωn。
clear;syms a s zeta omegan;zeta=0.7;
[a,omegan]=solve( omegan^2=8
omegan^2=8 ,
, 2∗0.7∗omegan=2+8∗a
2∗0.7∗omegan=2+8∗a );
);
a=vpa(a,4),omegan=vpa(omegan,4),
程序运行后得到a=0.245、ωn=2.828。
③对系统判稳。
clear;a=0.245;P=[12+8∗a 8];roots(P),
程序运行后得知系统的特征根均有负实部,根据代数稳定判据,系统稳定。
④求ess。
clear;syms s;G=8/(s∗(s+2+8∗0.245));H=1;xb=1;r0=0;v0=1;a0=0;
[essrr,essrv,essra]=insteerr(G,H,xb,[r0,v0,a0]);essrv=vpa(essrv,4),
程序运行后得到essrv=0.495。
3)在保证ζ=0.7与在r(t)=t作用时ess=0.25的条件下,确定参数a与K。
①求ess的数学表达式。
clear;syms a K G H1 H phi1 phi s;G=K/(s∗(s+2));H1=a∗s;H=1;R=1/s^2;
phi1=simple(G/(1+G∗H1));Er=simple(R/(1+phi1∗H));essr=limit(s∗Er,s,0, right
right ),
),
程序运行结果essr=(2+K∗a)/K。
②求参数a与K。
clear;syms a K omegan;
[K,a,omegan]=solve( (2+a∗K)/K=0.25
(2+a∗K)/K=0.25 ,
, 1.4∗omegan=2+a∗K
1.4∗omegan=2+a∗K ,
, omegan^2=K
omegan^2=K );
);
K=vpa(K,4),a=vpa(a,4),
程序运行后得到K=31.36,a=0.1862。
4)验证确定参数a与K后,在r(t)=t作用下的稳态误差ess=0.25。
①求局部反馈内环传递函数。
clear;syms a K G H1 H phi1 phi s;G=31.36/(s∗(s+2));(https://www.xing528.com)
H1=0.1862∗s;phi1=simple(G/(1+G∗H1)),
程序运行结果phi1=490000/(15625∗s+122488)/s。
②验证确定参数a与K后ess=0.25。
clear;syms s;G=490000/(15625∗s+122488)/s;H=1;xb=1;r0=0;v0=1;a0=0;
[essrr,essrv,essra]=insteerr(G,H,xb,[r0,v0,a0]);essrv=vpa(essrv,4),
程序运行后得到essrv0=0.25,说明以上参数计算正确。
需要说明的是,多元联立方程求解时,按未知变量的英语字母顺序列出其解,先列大写字母的,后列小写字母的。故等号左端方括号内需按此规则顺序输入未知变量。有困难时,可验算其根来解决。
【例7-6】 对图7-5所示系统,指定e(t)=r(t)-c(t)。1)当K2=1时,试问系统对r(t)是几型的?2)若使系统对r(t)为Ⅰ型的,试计算选择K2的值。
解:1)当K2=1时,容易看出系统对r(t)是0型的。
2)求系统闭环传递函数。
clear;syms K1 K2 T1 T2 s R C B E G H1 G1phi;
G=K1/((T1∗s+1)∗(T2∗s+1));H=K2;
phi=factor(G/(1+G∗H)),
程序运行结果phi=K1/(T1∗s^2∗T2+T1∗s+T2∗s+1+K1∗K2)。
求等效单位反馈系统的前向通道传递函数。
clear;syms K1 K2 T1 T2 s R C B E G H1 G1phi;
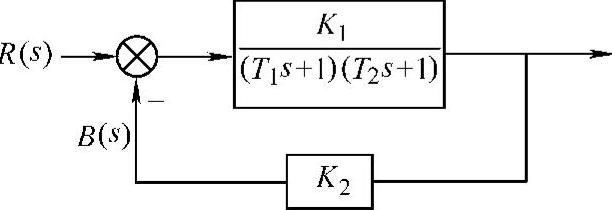
图7-5 负反馈控制系统
[G]=solve( K1∗(1+G)=G∗(T1∗s^2∗T2+T1∗s+T2∗s+1+K1∗K2)
K1∗(1+G)=G∗(T1∗s^2∗T2+T1∗s+T2∗s+1+K1∗K2) ,G);
,G);
G=factor(G);G=collect(G,s),
程序运行结果G=K1/(T1∗s^2∗T2+(T1+T2)∗s-K1+K1∗K2+1)。
分析前向通道传递函数表达式,当系统为Ⅰ型系统时,其G(s)应有一个积分环节,那么,表达式分母的一部分值K1K2-K1+1应为0。
计算选择K2的值。
clear;syms K1 K2;[K2]=solve( (1+K1∗K2-K1)=0
(1+K1∗K2-K1)=0 ,[K2]),
,[K2]),
程序运行后得到 。
。
【例7-7】 设复合控制系统框图如图7-6a所示。已知 、
、 、
、 。系统在扰动输入n(t)=1(t)作用下,要求系统稳态误差为零,试确定顺馈通道
。系统在扰动输入n(t)=1(t)作用下,要求系统稳态误差为零,试确定顺馈通道
的传递函数参数Gn(s)。
解:1)将控制系统框图7-6a等效变换,如图7-6b所示。
2)关系式。根据自动控制原理,对系统等效结构图有以下关系式,即

还有e(t)=r(t)-c(t),当r(t)=0时,en(t)=-cn(t)或En(s)=-Cn(s)。
3)计算系统的En(s)。
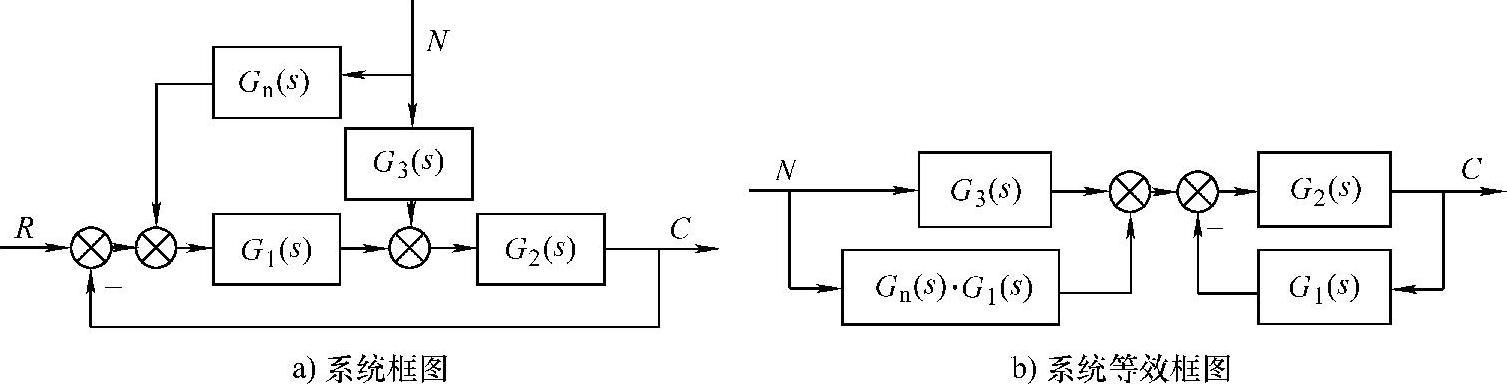
图7-6 复合控制系统
clear;syms s G1 G2 G3 Gn K1 K2 K3 T1 T2 N n phien Cn En;
G1=K1/(T1∗s+1);G2=K2/(s∗(T2∗s+1));G3=K3/K2;
phien=(G3+Gn∗G1)∗(G2/(1+G2∗G1));
n=sym( 1(t)
1(t) );N=laplace(n);Cn=phien∗N;En=factor(-Cn),
);N=laplace(n);Cn=phien∗N;En=factor(-Cn),
程序运行结果
En=-1/s∗(K3∗T1∗s+K3+Gn∗K1∗K2)/(T2∗s^3∗T1+T2∗s^2+T1∗s^2+s+K1∗K2)
4)分析关系En(s)的表达式。
只要En(s)表达式分子为0,在扰动输入n(t)=1(t)作用下,系统稳态误差就能为零。也就是当K3T1s+K3+GnK1K2=0时,ess=ls→im0s·E(s)=0。
clear;syms s K1 K2 T1 T2 En ess;
En=-1/s∗0/(T2∗s^3∗T1+T2∗s^2+T1∗s^2+s+K1∗K2);
ess=limit(s∗En,s,0, right
right ),
),
程序运行结果ess=0。
5)计算顺馈通道的传递函数参数Gn(s)。
clear;syms Gn s K1 K2 K3 T1 T2 Gn;
[Gn]=solve( K3∗T1∗s+K3+Gn∗K1∗K2=0
K3∗T1∗s+K3+Gn∗K1∗K2=0 ,Gn),
,Gn),
程序运行后得到Gn(s)= (T1s+1)。
(T1s+1)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。