



最著名的传感器自部署方法可能是参考文献(Howard et al.,2002a)引入的虚拟力(基于矢量)方法。迄今为止,人们已经提出了该技术的许多不同实现方案。虽然这些实现方案宣称它们是受到不同物理模型启发提出的,如势场(How-ard et al.,2002a)、分子(Heo and Varshney,2005)、电磁粒子(Wang et al.,2004a),但是其核心分享的都是共同理念。也就是说,每个节点i使用节点相对位置计算其邻居j引起的虚拟力(运动矢量)Vji,并根据根据合力(矢量和)Vi来运动。多轮运动后,网络达到一种平衡状态,它提供近似均匀的节点分布和近似最优的覆盖。
图10-5说明了在包含3个传感器的网络中,该方法的基本思路是如何实现的。最初,节点的感知范围重叠(图10-5a),虚拟力都是排斥的,导致它们反向运动,实现覆盖最大化。当节点移动时,节点2和节点3的感知范围趋于分离(图10-5b),二者之间的虚拟力变为引力,驱动它们相向运动,以避免感知空穴。最后,节点感知范围互相接触但没有重叠(图10-5c)。因此,虚拟力不再产生,节点不再移动。
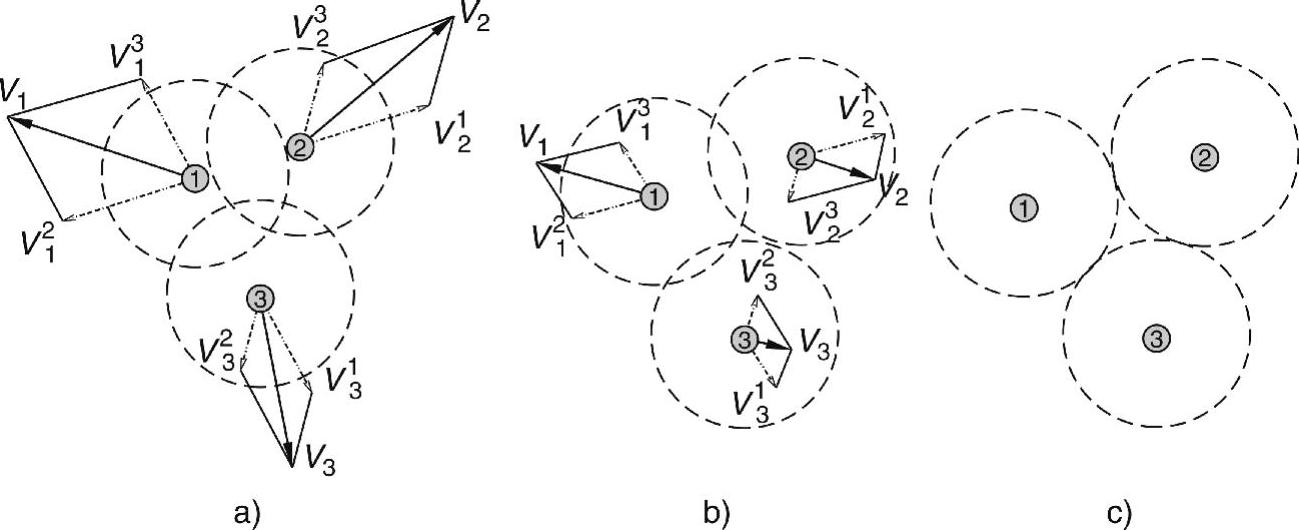
图10-5 基于矢量的方法
a)初始分布 b)瞬时分布 c)最终分布
通过添加不同终止机制或附加约束条件,基于虚拟力的现有传感器自部署算法对这一基本思路进行了扩展。例如,在参考文献(Howard et al.,2002a)中,虚拟摩擦力与节点速度成正比,且通常与节点运动方向相反,它可用于停止节点运动,最终达到静态平衡。在参考文献(Wang et al.,2004a)中,Voronoi图用于判断节点覆盖的有效性,协助它们决定停止运动。在参考文献(Heo and Varshney,2005)中,为了节能,计算虚拟力时将节点密度考虑在内。在参考文献(Ma and Yang,2007)中,每个节点接收来自于至少6个邻居的虚拟力,使得形成的网络具有TT布局。这种方法的两种最新变形描述如下。(https://www.xing528.com)
针对网络连通性和感知覆盖需求水平,参考文献(Poduri et al.,2009)研究了节点位置的控制问题。问题是在满足连通性约束条件的前提下,确定节点位置,使得感知覆盖最大化。假定移动节点(机器人)密集部署在ROI中。作者提出了每θ邻居(Neighbor Every Theta,NET)图。在这种图中,每个节点通信范围的每个θ角扇区内,至少拥有一个邻居。也就是说,分类排序后任意两个邻居之间的角度(从给定节点开始测量)≤θ。参考文献(Poduri et al.,2009)证明,即使采用不规则通信范围,当θ<π时,NET图能够保证边连通性至少为 。当且仅当图中任意两个节点之间至少存在一个k点-不相交的路径,则称该图是k-(边)连通的。基于单一参数θ,该图可以实现覆盖-连通性折衷。如果通信范围与感知范围相等,则当将k≥3个节点配置在通信范围边界的k个不相交
。当且仅当图中任意两个节点之间至少存在一个k点-不相交的路径,则称该图是k-(边)连通的。基于单一参数θ,该图可以实现覆盖-连通性折衷。如果通信范围与感知范围相等,则当将k≥3个节点配置在通信范围边界的k个不相交 扇区的边上,可以实现感知覆盖最大化(Poduri et al.,2009)。
扇区的边上,可以实现感知覆盖最大化(Poduri et al.,2009)。
在提出的部署算法(Poduri et al.,2009)中,用到了移动节点之间的斥力和引力。这些力具有平方反比定律的分布。当节点之间的距离为0时,斥力趋于无穷大,而当节点间的距离增加到Rc(边长的上界)时,引力趋于无穷大。由于假定所有移动节点最初都是密集部署的,网络连接状态良好,满足NET条件。每个节点排斥其邻居,以扩大感知覆盖。在这个过程中,一些邻居变得无法到达,如果它们与节点的距离超过CR。一旦邻居数接近NET条件的预计值,节点基于为满足NET条件所做的贡献,为每个邻居分配优先级。节点为那些对较大扇形角做出贡献的邻居分配较高优先级,并决定是否采用斥力/引力或同时使用斥力和引力。虽然行为提示非常明确,但算法仍然是不完美的。
参考文献(Garetto et al.,2007)提出了一种事件驱动局部自部署算法。在这种算法中,节点接收到虚拟力,包括来自于邻居的交换力、来自于检测的潜在力和与速度有关的摩擦力。所有这些力都是矢量,共同驱动节点运动。节点k在另一个节点i上施加交换力,当且仅当k与i相邻,ki≠2rs,且不存在其他节点k′,满足k′i<ki∧∠kik′<π/6。该条件限制了作用于节点i的邻居数最大为6,并迫使最终网络具有TT布局。如果节点距离小于2rs,则交换力是排斥的,否则交换力是引力。潜在力也可能是引力或斥力,这取决于节点检测事件强度。该力既可以将远程节点拉向事件位置,又可以将附近节点推开。通过调整事件强度阈值,可以实现事件位置周围的节点密度不同。摩擦力,它通常与节点运动方向相反,用于停止节点运动,最终达到静态平衡状态。
基于矢量的传感器自部署方法优势是,它支持节点仅使用自身的局部知识,即可做出部署决策。一些附加技术,如计算基于Voronoi图的终端技术(Wang et al.,2004a)要求进行全局,可能抵消了这种优势。实际上,该方法也有许多缺点。传感器无法通过靠近放置的障碍物,由于它们产生的排斥矢量,导致感知空穴和覆盖浪费。由于节点消失可能会打破平衡,触发一系列用于恢复的节点运动(可能是网络范围内的),当节点失效成为一种普遍现象时,可能会导致拓扑频繁变化(可能是网络范围内的)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。