



(一)轴线相互平行的定轴轮系
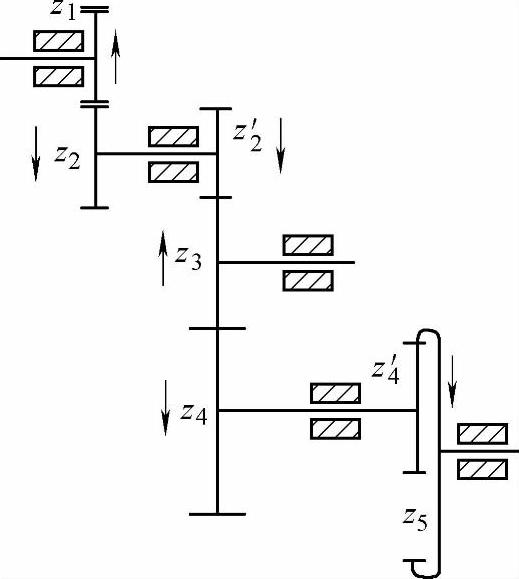
图2-18 定轴轮系传动原理图
图2-18所示为定轴轮系传动原理图,设O1轴为主动轴,输出轴O5为从动轴,齿轮齿数和转速分别为z1、z2′、z2、z3、z4、z4′、z5和n1、n2、n2′、n3、n4、n4′、n5,单级齿轮传动的传动比分别为i12、i23、i34、i45。此定轴轮系的轮系的总传动比为i15。于是有

将以上各式两边连乘后得

上式表明,定轴轮系的传动比等于轮系中各对啮合齿轮传动比的连乘积,其数值等于轮系中所有从动轮齿数连乘积与所有主动轮齿数连乘积之比。其正负号取决于外啮合齿轮的对数,奇数对外啮合取负号,表示首末两轮转向相反;偶数对外啮合取正号,表示首末两轮转向相同。
将以上情况推广,得出如下公式
式中 i1k——定轴轮系总传动比;
n1——定轴轮系首轮转速;
nk——定轴轮系末轮转速;
m——外啮合齿轮的对数。
(二)含有不平行齿轮轴线的定轴轮系
图2-19所示为含有锥齿轮传动的定轴传动轮系,其传动比为

其中,齿轮2对传动比没有影响,但能改变从动轮的转向,称为惰轮,也称为过轮或中介轮。(https://www.xing528.com)
(三)定轴轮系输入与输出轴转向的判断(即首、末轮转向的确定)
1.圆柱齿轮传动时的转向判断
如图2-19所示,箭头所指方向为齿轮上离操作者最近一点的速度方向。
1)外啮合时:两箭头同时指向(或远离)啮合点,头头相对或尾尾相对。
2)内啮合时:两箭头同向。
2.锥齿轮传动时的转向判断
如图2-19所示,可见一对相互啮合的锥齿轮其转向用箭头表示时,箭头方向要么同时指向节点,要么同时背离节点。
3.蜗轮蜗杆传动时的转向判断
由齿轮机构中蜗轮蜗杆的知识可知,一对相互啮合的蜗轮蜗杆其转向可用左右手定则来判断,如图2-20所示。
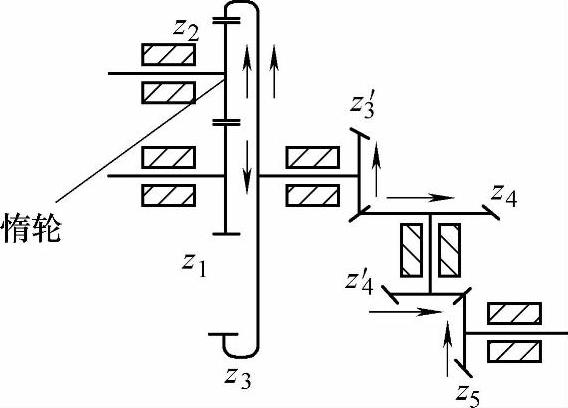
图2-19 含有锥齿轮传动的定轴传动轮系
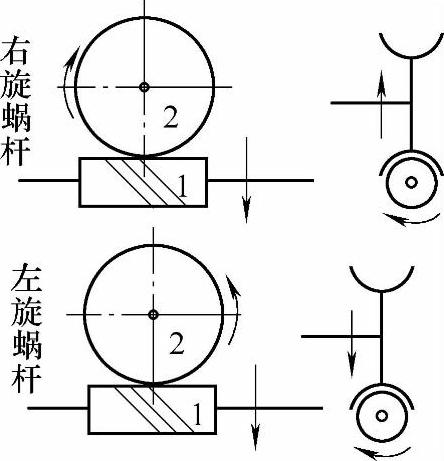
图2-20 蜗杆传动及旋向判断
4.交错轴斜齿轮传动时的转向判断
可用画速度多边形的方法来确定,如图2-21所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。