



中小型生产机械的继电-接触器控制电路,一般都不复杂,大多数都是由按钮、继电器、接触器等元件组成的系统来实现其控制的,因此在设计时,前面所讲述的电气设计的某些内容可以省略。其重点就是设计继电-接触器控制电路及选择电气元件。
当生产机械的控制方案确定后,可根据各电动机的控制任务不同,参照典型电路逐一分别设计局部电路,然后再根据各部分的相互关系综合而成完整的控制电路。
1.主电路设计
中小型生产机械的继电-接触器控制电路的主电路,一般都比较简单,大多数都是由接触器主触点、热继电器热敏元件等元件组成,来实现其拖动电动机单方向旋转,或由两个接触器控制,实现其拖动电动机正、反方向旋转。
2.控制电路设计
控制电路的设计应在满足生产机械电气控制系统具体要求的前提下,工作要可靠,力求操作、安装及维修方便。继电-接触器控制电路有一个共同的特点,是通过触点的“通”和“断”,控制电动机或其他电气设备来完成运动机构的动作。即使是复杂的控制电路,很大一部分也是动合和动断触点组合而成的。为了设计方便,把它们的相互关系归纳为以下几个方面。
(1)动合触点串联
当要求几个条件同时具备时,才使电器线圈得电动作,可用几个常开触点与线圈串联的方法实现。如图4-1a中,K1、K2、K3都动作接通时,继电器KM才动作,这种关系在逻辑线路中称“与”逻辑。
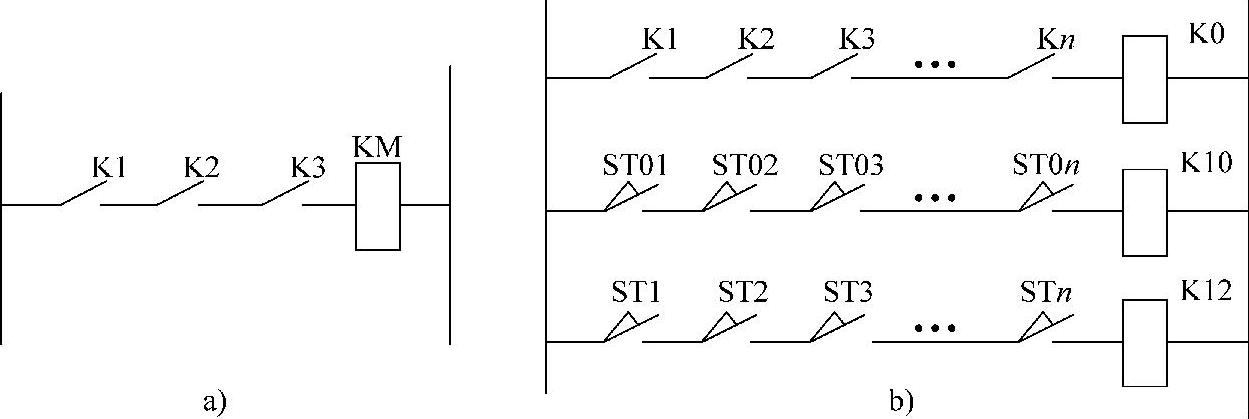
图4-1 某组合机床各动力头自动循环控制的部分线路
图4-1b所示为自动线各动力头加工完成后恢复原位,使夹具拨销松开的控制电路。在零件加工过程中,各动力头自动工作循环是由各动力头所属的机床控制系统自行控制的。必须每个动力头都进给到终点时,相应地接通继电器K1、K2、K3、…、Kn(分别在各自的机床控制电路中)使其各触点闭合,接通继电器K0,可发出加工完毕信号。只有动力头退回原位,限位开关ST01、ST02、ST03,、…、ST0n都被压下,才能接通K10,各动力头加工完成,并返回原位后,各发出夹具拨销放松的信号。这一动作完成后,各限位开关ST1、ST2、ST3、…、STn都被压下,使K12动作发出信号。
很明显K1、K2、K3、…、Kn动合触点串联,ST01、ST02、ST03、…、ST0n触点的串联,以及ST1、ST2、ST3、…、STn触点的串联都是“与”的关系,缺一不可。
(2)动合触点并联(https://www.xing528.com)
当在几个条件中,只要求具备其中任一条件,所控制的继电器线圈就能得电,这时可用几个动合触点并联来实现。如图4-2a所示,只要K1、K2、K3其中之一动作,KM就得电动作。这种关系在逻辑线路中,叫“或”逻辑。
图4-2b中,SB3、SB4为两地控制起动按钮,只要其中之一动作,接触器KM就动作,具备条件之一即可。
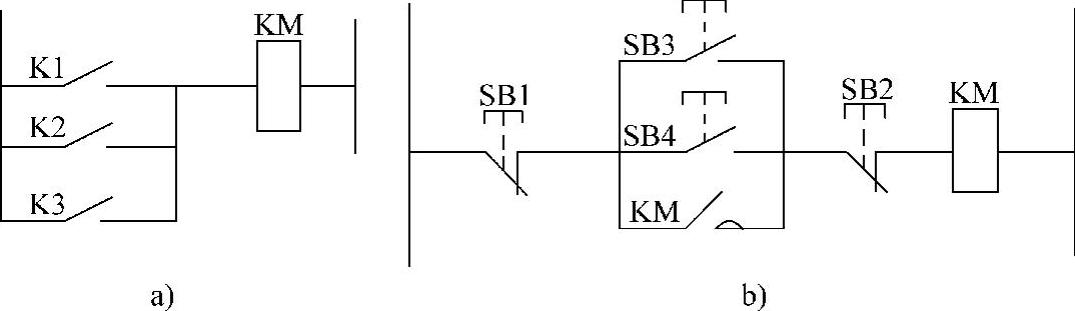
图4-2 两地控制电路
(3)动断触点串联
当几个条件仅具备一个时,继电器线圈就断电,可用几个动断触点与控制的电器线圈串联的方法来实现。如图4-2b中SB1、SB2两个停止按钮,其中一个动作,接触器就断电。图4-3中的SB0各停止按钮也是如此(按钮SB0是紧急停车用,通常在自动线几处分设)。
(4)动断触点并联
当要求几个条件都具备时,电器线圈才断电,可用几个动断触点并联,再与控制的继电器线圈串联的方法来实现。图4-3所示为某自动线预停控制电路,自动线预停时,可按“预停”按钮SB3,由动断触点K3、K10和K12所组成的并联电路与接触器KM0线圈串联(KM0是自动线控制电路送电用接触器)是为了保证,只有当所有动力头已经退回原位(K10动作)、夹具拔销松开(K12动作)、且原来已发出“预停”信号时(K3动作),才能使KM0断电释放,将控制电路的电源切断。
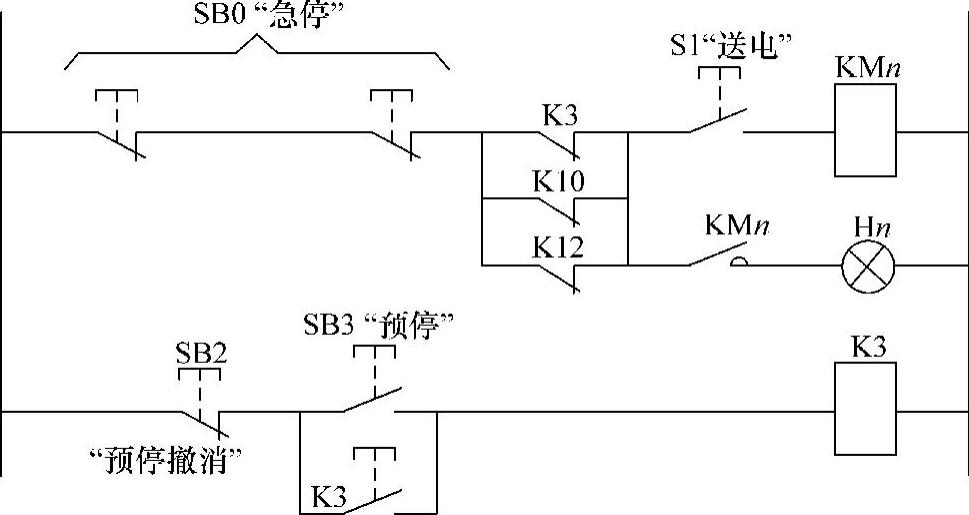
图4-3 某自动线预停控制电路
一般保护电器应既能保证控制电路长期正常运行,又能起到保护电动机及其他电气设备的作用。一旦电路出故障,它的触点就应以“通”转为“断”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。