



1.总切向反作用力的控制
制动防抱死装置(ABS)就是实行总制动力控制,抑制过大的制动力,以确保较佳的滑移率,提高制动时的方向稳定性。汽车驱动轮在传递驱动力时会产生一定程度的滑转,滑转率过大时,同样会使汽车丧失侧向的稳定性。因此,也有不少汽车采用“驱动控制系统”(Traction Control System,缩写为TCS,或ASR),实行总驱动力控制,以提高驱动时的方向稳定性。
2.前、后轴间切向力分配比例的控制
上面已谈到通过改变前、后轮间切向力分配比例是可以改变汽车转向特性的。
图4-37a给出了由仿真计算求得的前、后轮驱动力不同分配比例时,4WD(4轴驱动)汽车在转向盘转角为90°并以0.2g纵向加速度行驶时汽车的路径。αc为前轴驱动力与整车驱动力之比。可以看出,当αc=0.5时,其对应的曲线路径居中,不足转向适中;当αc=1.0,表明该车仅使用前驱动(FWD),其对应的曲线路径比起αc=0.5的路径是往外扩展,汽车具有较强的不足转向;当αc=0时,表明该车仅使用后驱动(RWD),其对应的曲线路径比起αc=0.5的路径是往里收缩,表明汽车增加了过度转向的趋势,只具有较弱的不足转向。
日产公司研制了一种总是保持“中性转向”特性的电子控制前、后驱动力分配系统(ETS),装用在4WD汽车上。图4-37b为该4WD汽车与其他三辆不同型号4WD汽车,在转弯半径为30m的圆角上,以同样的转向盘转角,加速行驶时所经路径对比图。从图可见,装有ETS装置的4WD汽车的行驶路径具有接近中性转向的特点,即接近原来的圆周路径,驾驶人“方向感”良好,容易判定行驶路径,具有良好的操纵稳定性。仅前驱动时,汽车具有强的不足转向;仅后驱动时,汽车具有过度转向。
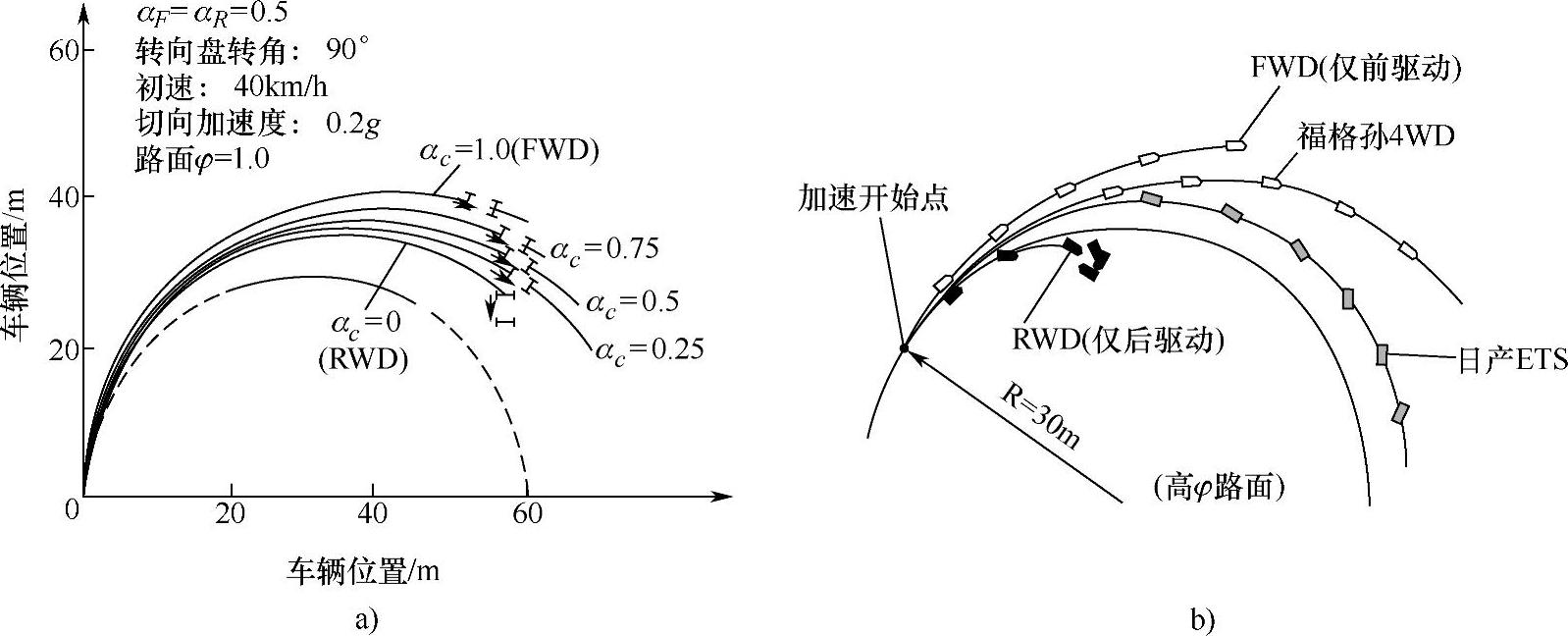
图4-37 四轴驱动汽车的转向行驶路径
a)四轴驱动汽车在不同前、后驱动力分配比例下的行驶路径 b)具有ETS电子控制系统的日产4WD汽车(转向盘转角固定不动)加速转弯行驶的路径
αF—前轴外侧车轮驱动力与该轴驱动力之比 αR—后轴外侧车轮驱动力与该轴驱动力之比 αc—前轴驱动力与整车驱动力之比
3.内、外侧车轮间切向力分配比例的控制
近年来,有的汽车公司已研发出可以改变内、外侧车轮驱动力分配比例的新传动系,如本田公司的DYCS——直接横摆力偶矩控制系统(亦称DYC)。
装有普通差速器的汽车,其内、外侧车轮的驱动力是相等的,驱动力的合力在汽车纵轴线上。若要改变内、外侧车轮驱动力的比例,则在装有普通差速器的基础上再施加一定数值的横摆力偶矩亦可实现。所这种驱动力的控制方式常称为横摆力偶矩控制。
上述的改变前、后轮间驱动力分配比例的控制方式的实质也是横摆力偶矩控制,因此将它称为间接横摆力偶矩控制;而将改变内、外侧车轮驱动力分配比例的控制方式称为直接横摆力偶矩控制。
直接横摆力偶矩控制的机理是:把汽车看成简化的二自由度模型时,它的力和力矩的平衡方程式如下
式中 FY1、FY2——前、后轮侧偏力;
m——汽车质量;
ay——汽车侧向加速度;
IZ——汽车绕质心的转动惯量;(https://www.xing528.com)
 ——汽车横摆角加速度;
——汽车横摆角加速度;
a、b——前、后轴至质心的距离。
由上式可知,虽然FY1与FY2之和等于may,但二者数值大小的分配还取决于 的变化,惯性阻力偶矩大些,FY1则大些,,FY2则小些。
的变化,惯性阻力偶矩大些,FY1则大些,,FY2则小些。
图4-38为汽车处于稳态圆周行驶下的受力图。此时,力矩平衡方程为
FY1a-FY2b=0
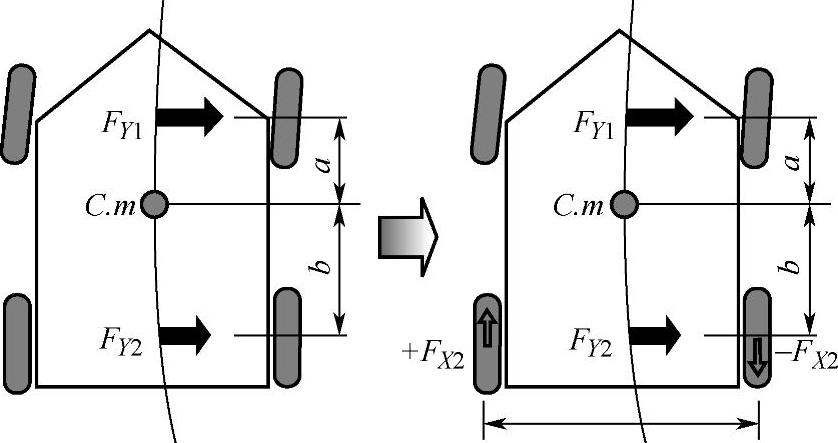
图4-38 稳态转向行驶时汽车的力平衡图
按照控制系统的设计思路,若在后轴外侧车轮作用一个+FX2、后内侧车轮作用一个-FX2,这相当于附加了一个相应的横摆力偶矩FX2B,力矩平衡方程式则变为FY1a+FX2B-FY2b=0
显然,在附加了这个横摆力偶矩以后,FY1减小了,FY2增大了;相应的效果是前轮侧偏角α1减小了,后轮侧偏角α2增大了,这将减小了汽车的不足转向量。若附加一反向的横摆力偶矩,则将产生相反的效果——增加了汽车的不足转向量,从而提高了汽车的方向稳定性。这就是直接横摆力偶矩控制系统(DYC)的机理。由此可见,作用于汽车的横摆力偶矩可以改变前、后轮地面侧向反作用力的数值、稳态转向特性以及汽车稳态行驶路径。
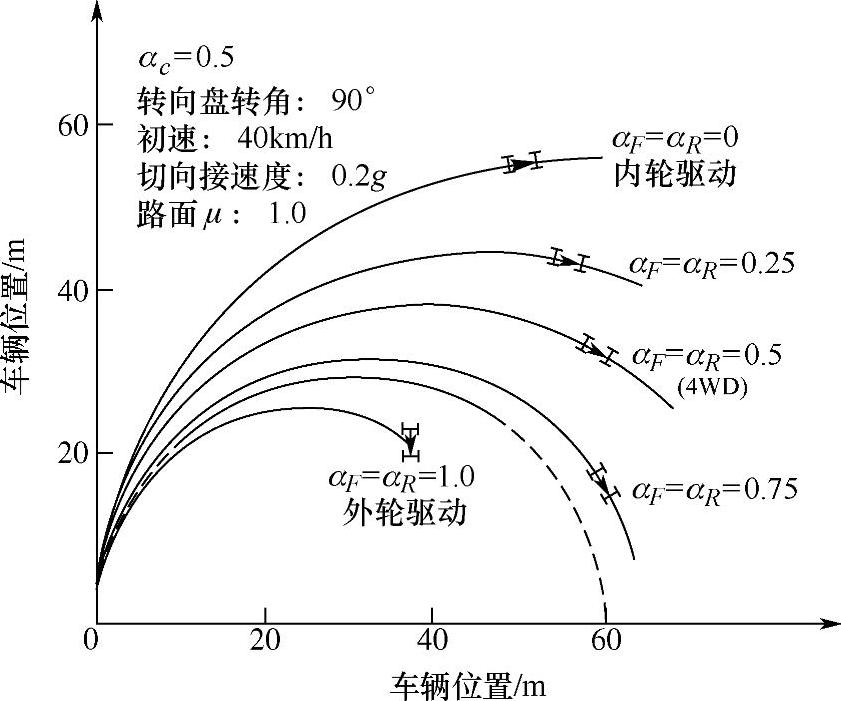
图4-39 4WD(四驱动)汽车在不同内、外侧驱动力分配比例时固定转向盘转角加速行驶的路径(图中符号含义同图4-37a)
图4-39是由仿真计算求得的内、外侧驱动力不同分配比例时,固定转向盘转角条件下汽车加速行驶的路径。行驶路径表明,单纯内侧轮驱动时,汽车具有强的不足转向;单纯外侧轮驱动时,汽车为过度转向;前、后四轮驱动时,不足转向量要比单纯内侧轮驱动的小。此图与图4-37a相比较可以看出,直接横摆力偶矩的作用要比间接横摆力偶矩的作用大一些。
4.提高极限工况下汽车弯道行驶行性能的控制机理
所谓极限工况是指前轮即将发生或开始发生侧滑的工况。图4-40a给出了汽车处于稳态转向时,且前轮的地面侧向反作用力已接近其附着极限。此时,若驾驶人企图在弯道上继续加速行驶,汽车将产生前进加速度与相应的横摆角加速度 ,这将使前轮所需要的纵向和侧向的地面反作用力超过了其附着极限,前轮必然发生侧滑而丧失路径跟踪能力。若在此加速之际,充分利用附着力尚有富余的后轴,给汽车后轴施加一个恰当数值的横摆力偶矩FXB,如图4-40b所示,则力矩平衡方程式为
,这将使前轮所需要的纵向和侧向的地面反作用力超过了其附着极限,前轮必然发生侧滑而丧失路径跟踪能力。若在此加速之际,充分利用附着力尚有富余的后轴,给汽车后轴施加一个恰当数值的横摆力偶矩FXB,如图4-40b所示,则力矩平衡方程式为

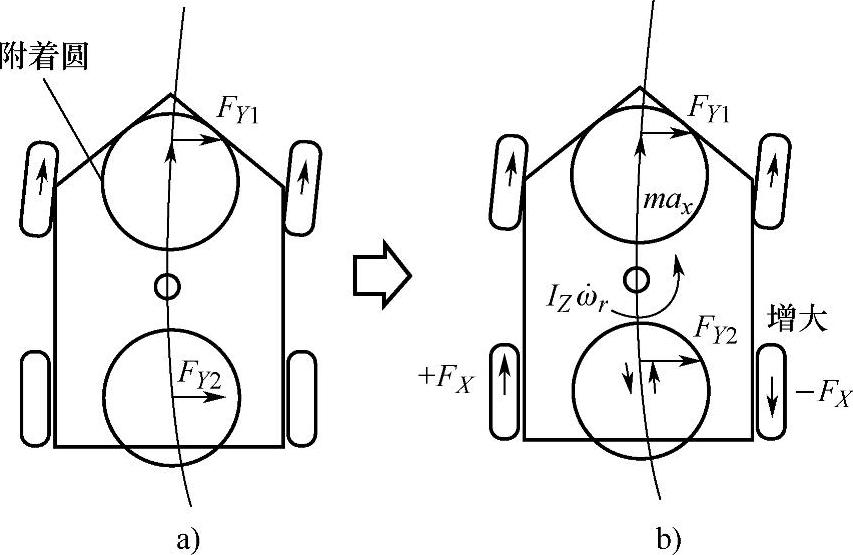
图4-40 “直接横摆力偶矩控制系统”能提高弯道加速性能的机理
a)稳态转向时的状况 b)附加横摆力偶矩作用时的加速行驶状况
如果附加的横摆力偶矩FXB较大,它除了用以克服惯性阻力偶矩 还有剩余,则加速过程中的前轮侧偏力FY1不仅不会增大而且还会减小。这就给前轮创造一个提供更大驱动力使汽车加速的条件。可此可见,充分利用后轴富余的附着条件,运用直接横摆力偶矩控制法,即在后轴附加一个方向与惯性阻力偶矩相反的横摆力偶矩,可以提高汽车弯道行驶能力,进一步提高汽车的操纵稳定性。
还有剩余,则加速过程中的前轮侧偏力FY1不仅不会增大而且还会减小。这就给前轮创造一个提供更大驱动力使汽车加速的条件。可此可见,充分利用后轴富余的附着条件,运用直接横摆力偶矩控制法,即在后轴附加一个方向与惯性阻力偶矩相反的横摆力偶矩,可以提高汽车弯道行驶能力,进一步提高汽车的操纵稳定性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。