



1.安全预警方法
本书中采用的危险警示距离模型的数学表达式为

制动临界距离模型的数学表达式为

上述两个式子中,dwarning*(单位:m)为车辆危险警示临界距离参数,dbraking*(单位:m)为制动临界距离参数;τsystem(单位:s)为车辆制动系统协调时间参数,τhuman(单位:s)为驾驶人制动反应时间参数,dsafe(单位:m)为距离补偿参数;v(单位:m/s)为本车车速参数;v*(单位:m)为危险点限速参数,α(单位:m/s2)为制动减速度参数。
其中,v*、α、τsystem、τhuman和dsafe可根据具体应用场景设置,例如,可取v*=8m/s,α=6m/s2,τsystem=0.2s,τhuman=1s以及dsafe=5m。参数f和g由软件系统根据车辆行驶的道路路面状况、天气状况、驾驶人的驾驶偏好设定,如可以取f=1.2,g=1.2。
预警模型定义无量纲参数ω表征车辆逼近危险点的程度,其计算式为

式中,d(单位:m)为本车辆与最近危险点的距离。(https://www.xing528.com)
这里定义两个预警点阈值ω0及ω1,分别对应距离最近危险点的距离为d0=500m和d1=300m。
当ω≈ω0时,通过语音提示驾驶人前方有危险点;当ω≈ω1时,判读车辆速度是否大于危险点限定速度,如大于则报警并提示驾驶人减速;否则提示驾驶人前方有危险点。
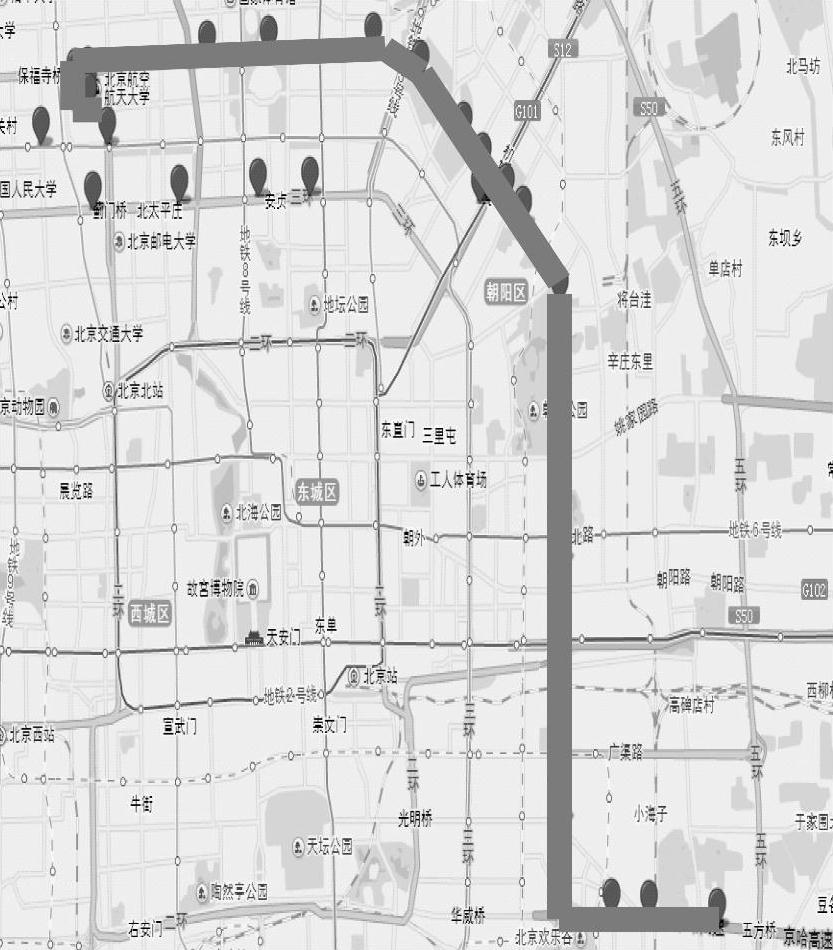
图5-6 实车测试场景图
2.实车测试及效果
为了验证提出的安全预警策略的可行性,我们进行了实车测试验证。图5-6中蓝色轨迹为实车行驶的路线,红色点为沿路的危险点。图5-7为实测中软件的运行截图,在实际过程中,能够准确预警,并通过语音提示驾驶人,预警效果良好。
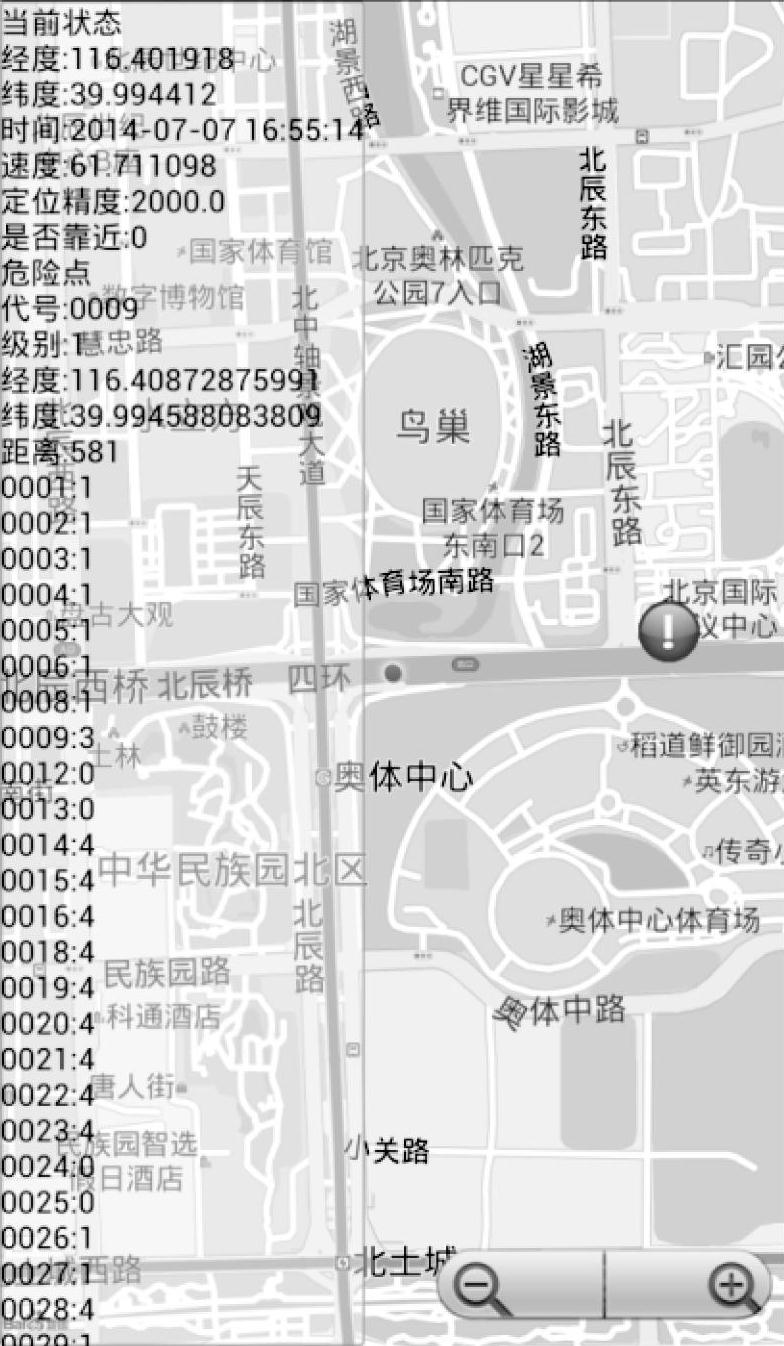
图5-7 预警过程中软件截图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。