



该系统由智能摄像机网络组成[295]。摄像机网络包括两种单元,它们是相互协作的静态摄像机单元(SCU)和动态摄像机单元(DCU)。SCU使用大量的通用静态摄像机来执行目标检测[375]、行为理解[376]以及异常事件检测[377]。一旦检测到感兴趣的事件,系统就从DCU中选取最近的或更适当的PTZ摄像机来执行协作立体定位。PTZ摄像机朝着所选的目标移动时需要方向参数,这些参数是由静态摄像机来估计的。当所选目标同时处于两个摄像机的视场时,这两个摄像机开始协作立体定位。在SCU中,不同的静态摄像机之间的切换实现了对监控环境中目标的协作跟踪。轨迹数据用于在连续协作跟踪中进行不同静态摄像机之间的任务切换。在摄像机网络中,基于多协议的通信系统用于摄像机之间的协作。这种方式的通信系统需要较低的带宽。
这种方式中,所提出的架构使用了一对异构摄像机。第一台(左边)摄像机是静态摄像机,它在室外环境(停车场)中有广阔的固定视场。以协作的方式从SCU中选取静态摄像机,从DCU中选取PTZ摄像机。第二台(右边)摄像机是放置在静态摄像机附近的AXIS PTZ摄像机。摄像机的视场由平移/倾斜/缩放的设置参数决定,并且可以根据需求进行调整[378]。在监控场景的地面测试图上对移动目标进行定位。测试图的真实尺寸在x-方向上长40m且在y-方向上长30m。
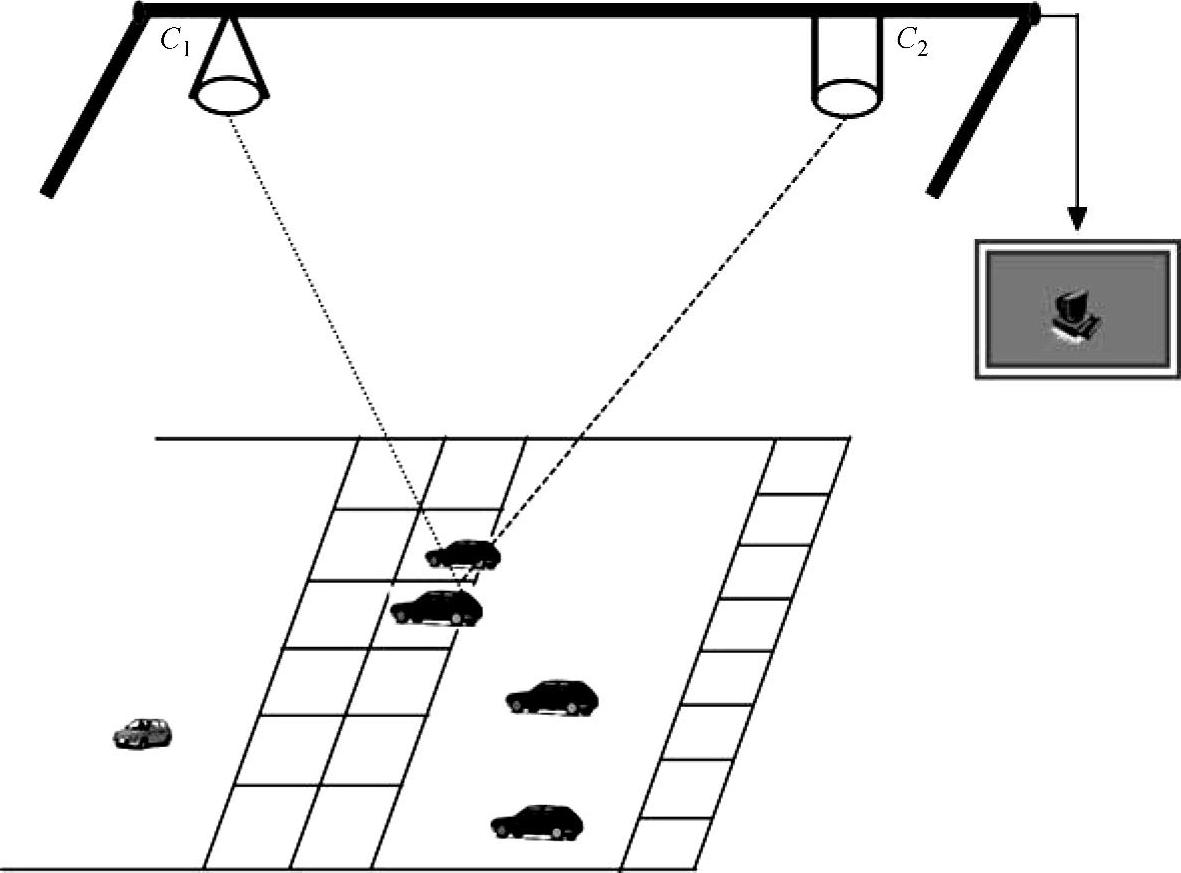
图15.1所示为所提出立体系统的虚拟设计,图中的C1和C2分别代表静态摄像机和动态摄像机。静态摄像机C1有固定的视场,PTZ摄像机通过平移/倾斜/缩放设置获得自己的视场(部分或者全部)。一旦在静态摄像机视场中检测到特定对象,就改变PTZ摄像机的平移/倾斜/缩放设置参数,使得目标进入它的视场中。
 (https://www.xing528.com)
(https://www.xing528.com)
图15.1 异构立体视觉系统的虚拟设计
和传统的立体视觉系统相比,PTZ摄像机部署的属性使得立体视觉问题变得更加复杂。本架构中,这对摄像机获取的图像是异质的,也就是说,它们有不同的内部参数。若对这些异质图像进行进一步的校正之类的操作,将使图像校正后的误差更大。因此,从含有误差的校正图像对中进行立体匹配是困难的。但是参考文献中对这种问题的关注并不够。在校正之前必须对这些内部参数所造成的影响进行补偿。换句话说,在进一步处理之前,必须将这些异质图像对转换成均匀的图像对。所提出的相应方法基于图像对的焦距信息,并且可以实时实现。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。