



在本节开头,用一个红绿灯程序引入,介绍了S7 Graph的基本知识,接下来,利用红绿灯程序讲解时序动作控制功能,下面介绍并行分支与合并程序的编程方法。
1)新建名为“交通灯”的项目,并完善项目的硬件组态,如图6-27所示,同时插入一个编程语言为“GRAPH”的功能块(本例是FB1)和FB1的背景数据块DB1。
2)打开FB1并在里面插入单序列的5个步,如图6-28所示。
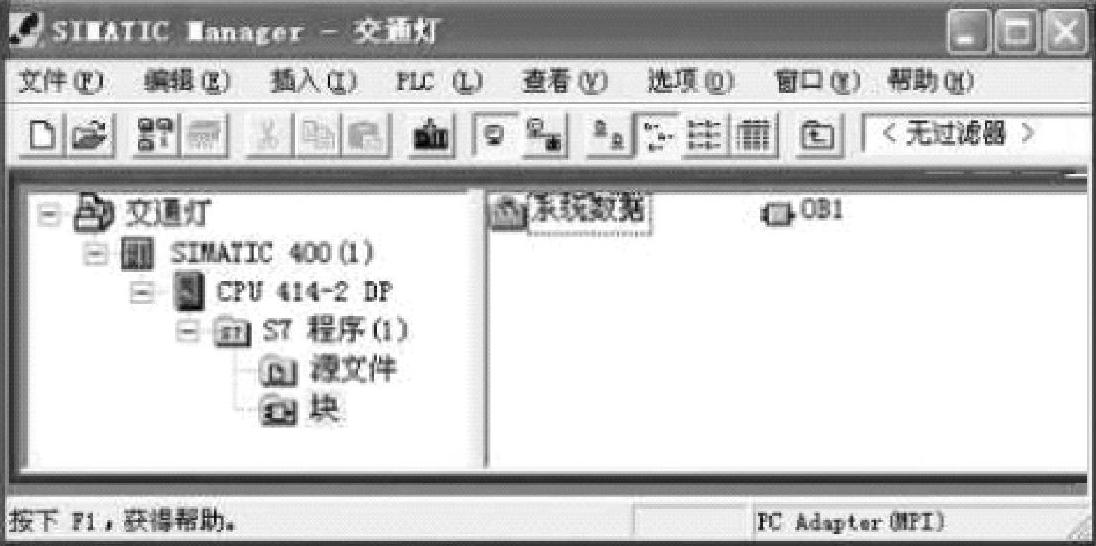
图6-27 建立新项目
3)然后选中(单击鼠标左键)需要插入并行分支的地方(如图中T1附近的地方),然后单击“ ”即可以插入一个并行分支的“步”,如图6-29中的“S8”。
”即可以插入一个并行分支的“步”,如图6-29中的“S8”。
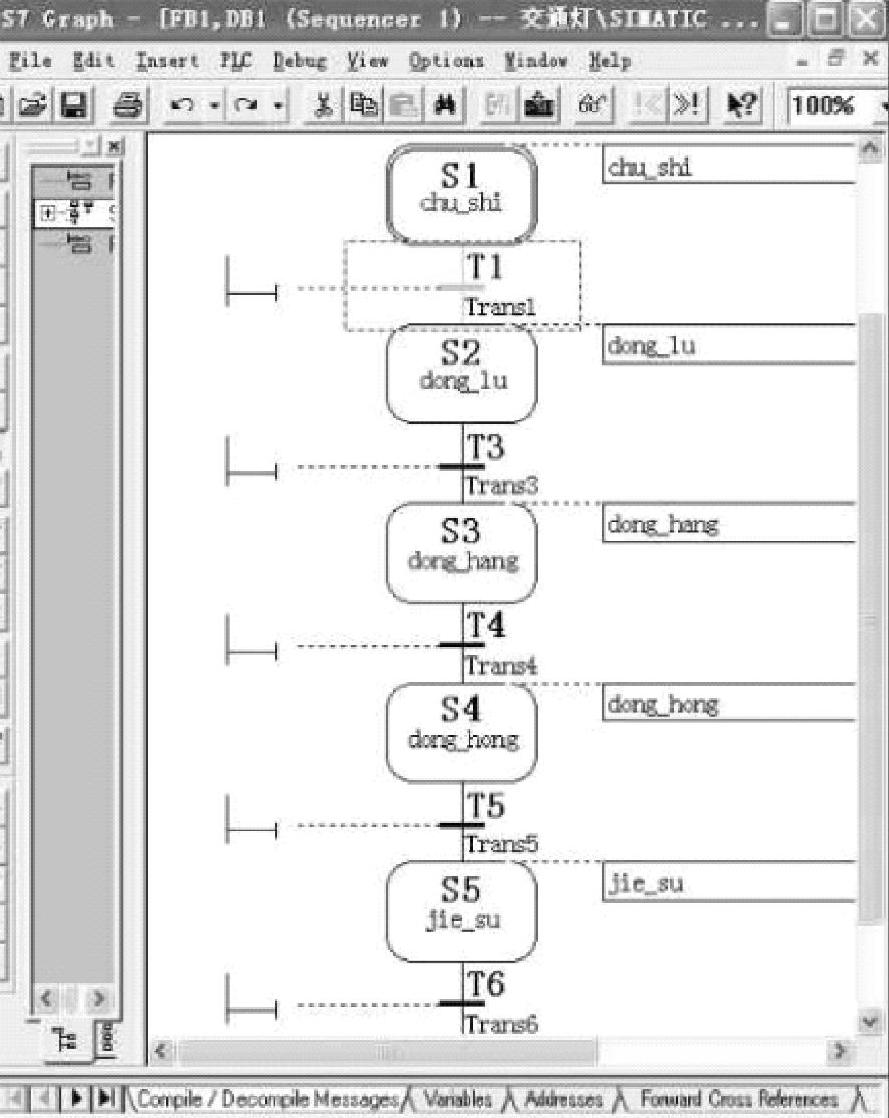
图6-28 插入并行分支
4)插入并行合并的“步”。选中步“S8”,单击“ ”,这时鼠标出现一个附加的光标,把附加的光标拖动到准备合并的地方(本例是T4附近),如图6-29所示,然后单击鼠标左键即可。
”,这时鼠标出现一个附加的光标,把附加的光标拖动到准备合并的地方(本例是T4附近),如图6-29所示,然后单击鼠标左键即可。
5)利用同样的方法插入另外一个并行分支和合并的“步”,如图6-30所示的“S9”和“S10”。
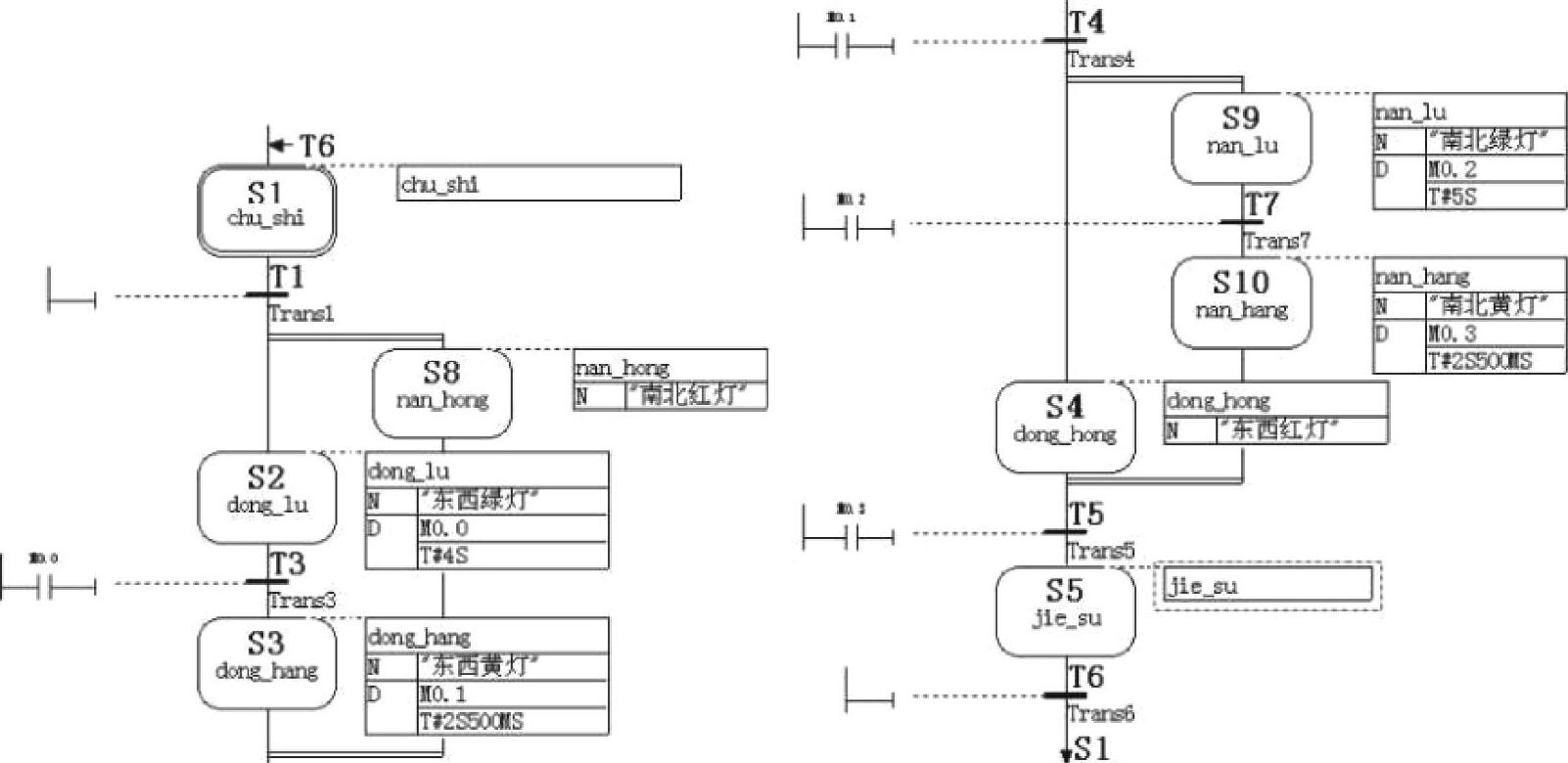
6)在各个“步”按照系统要求编写动作程序和转移条件程序,如图6-31所示。
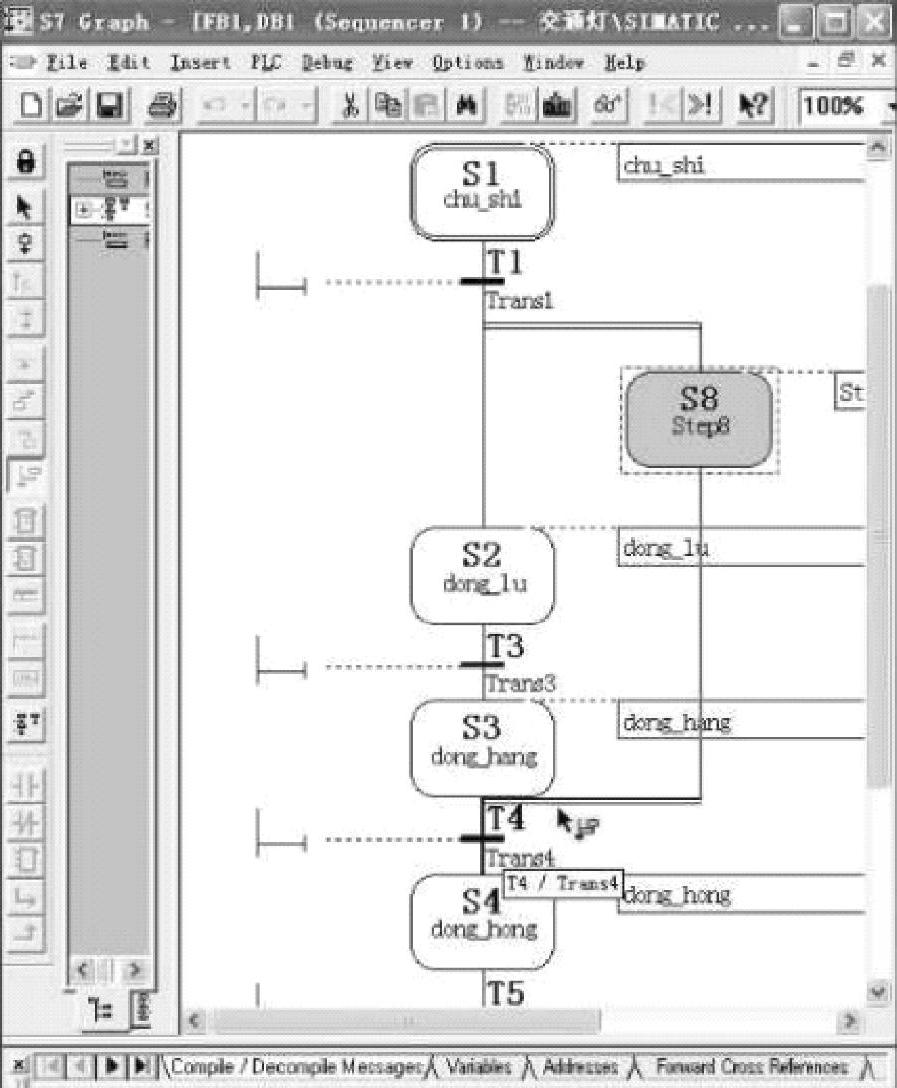
图6-29 插入并行合并
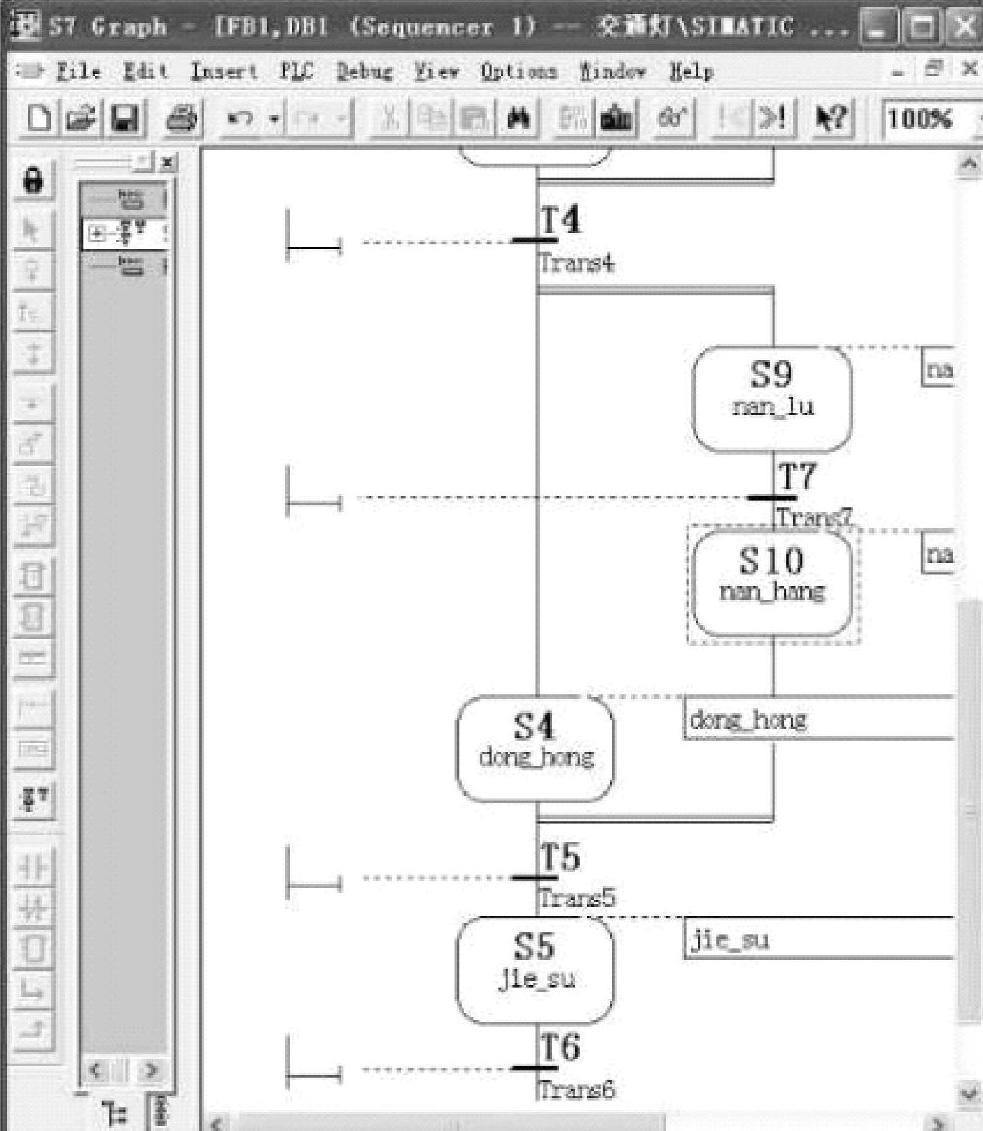
图6-30 编写另外一个并行的分支和合并的“步”
 (https://www.xing528.com)
(https://www.xing528.com)
图6-31 编写动作和转移程序
7)图6-31的“S1”和“S5”(空步)中没有动作,不需要编写动作程序,同时转移条件是无条件转移,也不需要编写。由于在“S1”和“S5”中没有动作和转移程序,在保存编译时会出现警告提示,这没有问题,这些警告只是起提醒作用。
保存编译结束时在信息栏出现的编译结果字样如下:
Compile:交通灯\SIMATIC 400(1)\CPU414-2DP\...\FB1,DB1-<Offline>
Warningsoccurred
Warning>>>(T1)withoutcontents.
Warning>>>(T1,Condition)Condition is alwaystrue.
Warning>>>(T6)withoutcontents.
Warning>>>(T6,Condition)Condition is alwaystrue.
Warning>>>(S1)withoutcontents.
Warning>>>(S5)withoutcontents.
0error(s) found;6 warning(s)found
8)在OB1里编写调用FB1的程序,如图6-32所示。
9)然后在项目管理界面把整个项目信息下载到CPU中(本例是PLCSIM),然后运行CPU,打开FB1监控程序运行,如图6-33所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。