



【摘要】:在PID控制中,微分的引入可改善系统的动态特性,但同时也容易引起高频干扰,在偏差信号突变时尤其显出微分的不足。图3-31 微分先行PID控制的结构图微分先行PID控制特别适用于系统频繁升降的场合,可以避免给定值升降时引起的系统振荡,大大改善系统的动态特性。图3-32 微分先行PID控制方波响应和控制器输出(续)图3-33 普通PID控制方波响应和控制器输出图3-33 普通PID控制方波响应和控制器输出(续)
在PID控制中,微分的引入可改善系统的动态特性,但同时也容易引起高频干扰,在偏差信号突变时尤其显出微分的不足。
微分先行PID控制的思想是只对系统的输出变量y(k)进行微分,而对给定值r(k)不进行微分。这样,在改变给定值时,由于输出变化比较缓和,所以不致引起系统大的振荡。
微分先行PID控制系统结构图如图3-31所示。
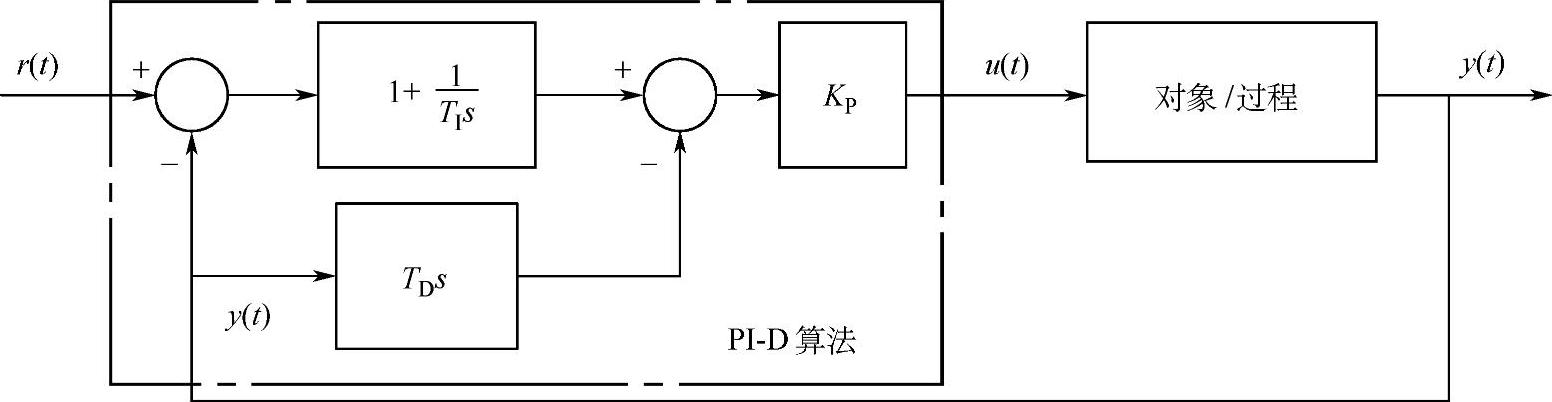
图3-31 微分先行PID控制的结构图
微分先行PID控制特别适用于系统频繁升降的场合,可以避免给定值升降时引起的系统振荡,大大改善系统的动态特性。
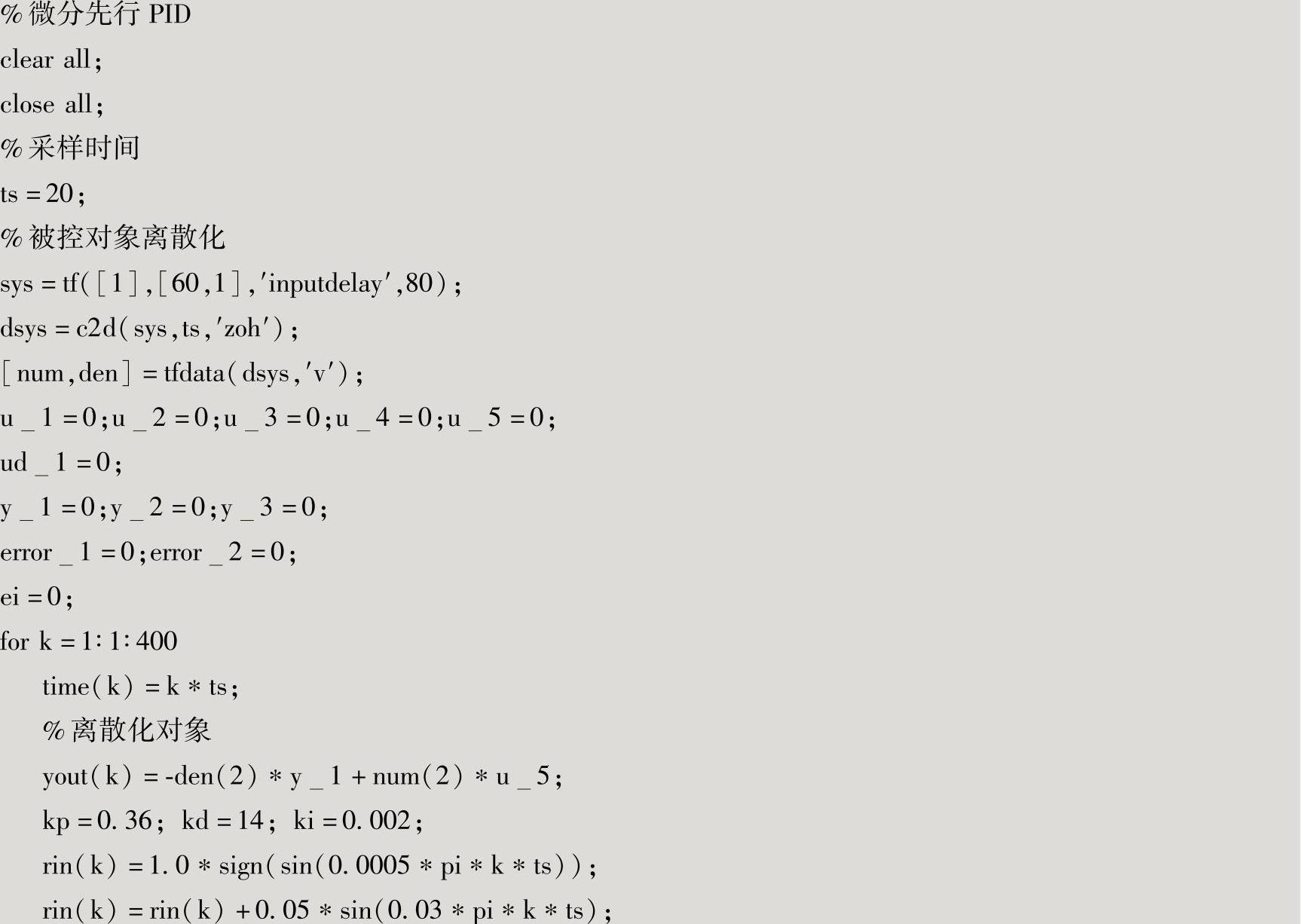
设被控对象为一阶惯性加滞后,即
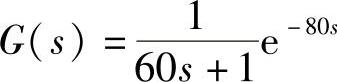
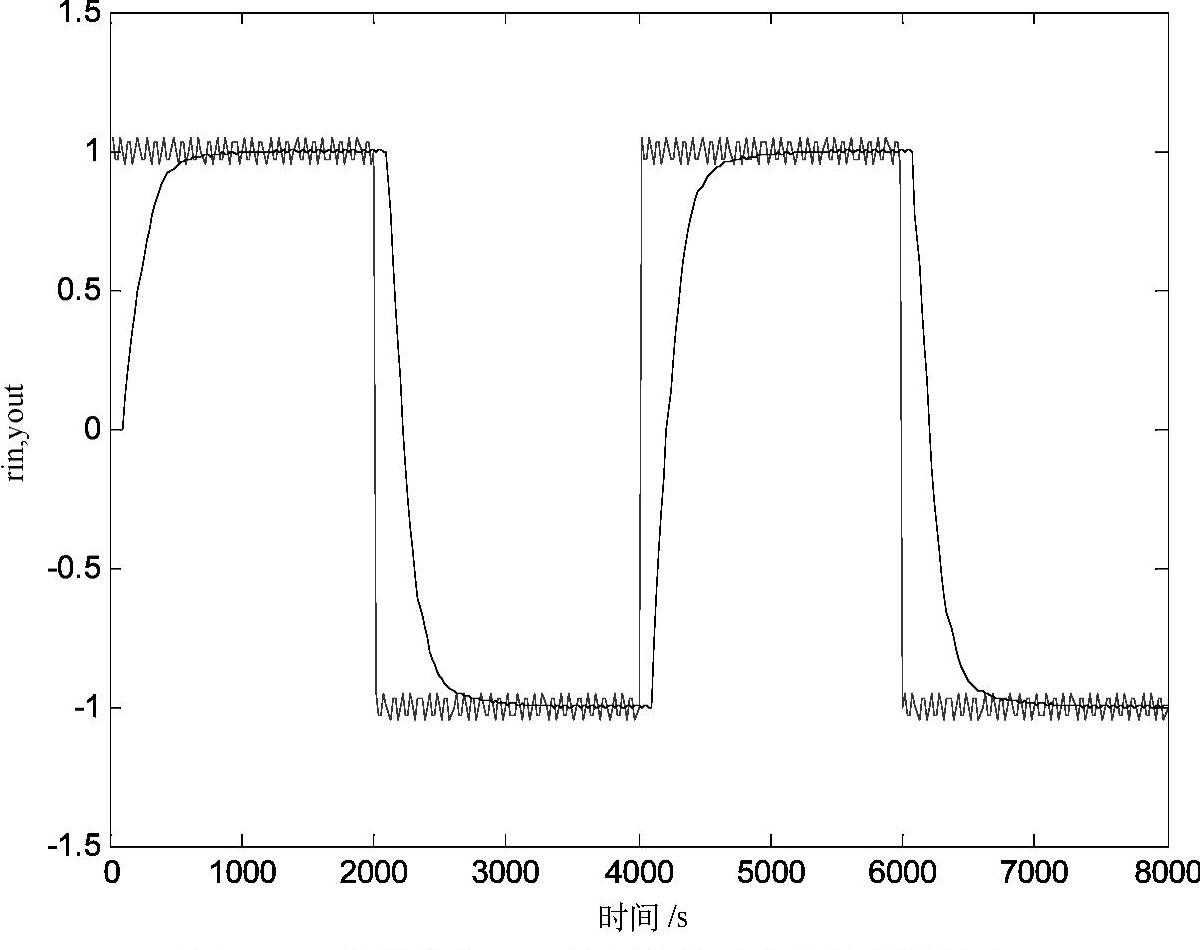
图3-32 微分先行PID控制方波响应和控制器输出
输入信号为带有高频干扰的方波信号,即(https://www.xing528.com)
r(t)=1.0sgn[sin(0.0005πt)+0.05sin(0.03πt)]采样周期为20s,延迟时间为4个采样周期,取KP=0.36,KD=14,KI=0.002。采用微分先行PID控制算法系统的阶跃响应曲线如图3-32所示,采用普通PID控制系统的阶跃响应曲线如图3-33所示。
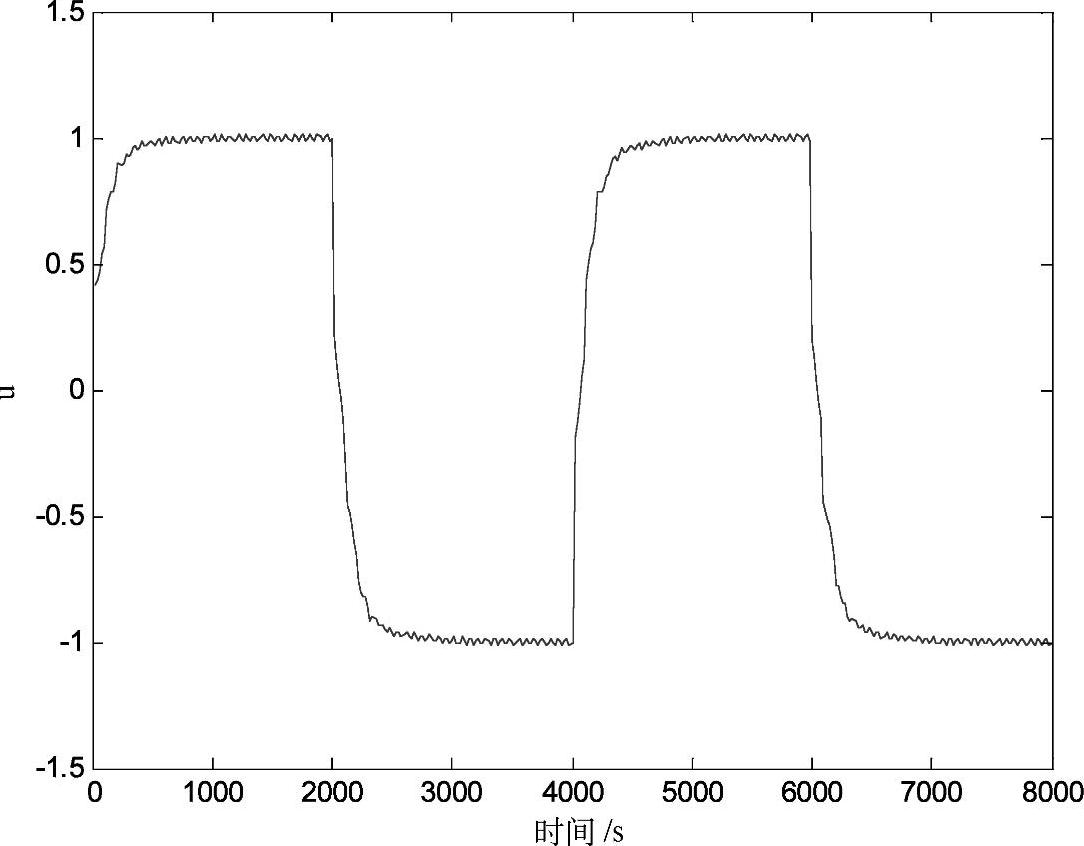
图3-32 微分先行PID控制方波响应和控制器输出(续)

图3-33 普通PID控制方波响应和控制器输出
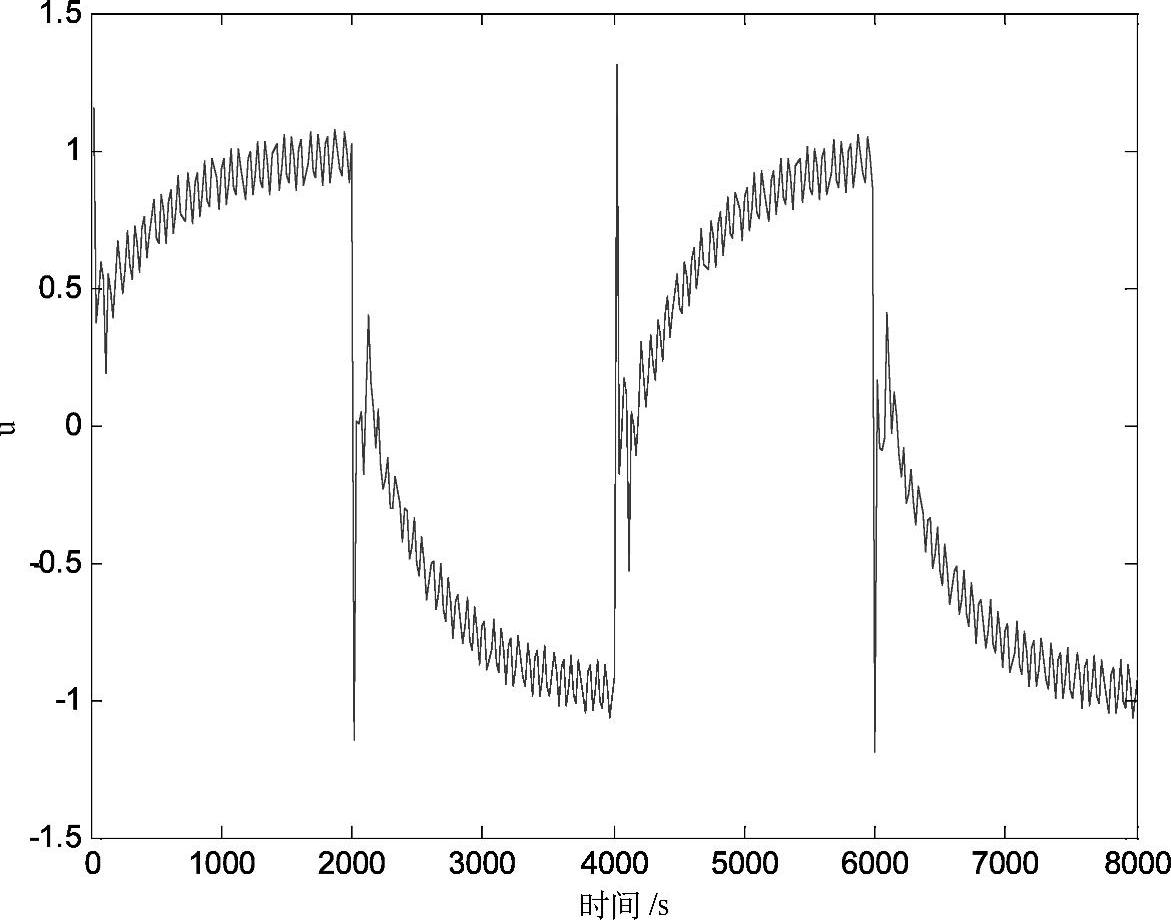
图3-33 普通PID控制方波响应和控制器输出(续)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。