



在闭环负反馈控制系统中,系统的偏差信号e(t)是系统进行控制的最基本的原始信号。为了提高控制系统的性能指标,可以对偏差信号e(t)进行改造,使其按照某种函数关系进行变化,形成所需要的控制规律P,从而使控制系统达到所要求的性能指标,即
u(t)=f[e(t)]
所谓PID控制,就是对偏差信号e(t)进行“比例加积分加微分”形式的改造,形成新的控制规律u(t)。PID是比例(P)、积分(I)、微分(D)之意。标准PID的控制值是与偏差(设定值与实际值之差)、偏差对时间的积分、偏差对时间的微分,三者之和成正比。如用公式表示,即
式中 Kpe(t)——比例控制部分,Kp称为比例常数;
 ——积分控制部分,Ti称为积分时间常数;
——积分控制部分,Ti称为积分时间常数;
 ——微分控制部分,Td称为微分时间常数。
——微分控制部分,Td称为微分时间常数。
在零初始条件下,将上式两边取拉普拉斯变换,可得

基于PID控制的闭环负反馈控制系统的传递函数方块图如图4-30所示。
上式用于连续系统的PID控制。如在PLC控制中用它,则必须将其“离散化”,用相应的数值计算,代替这里的积分、微分。
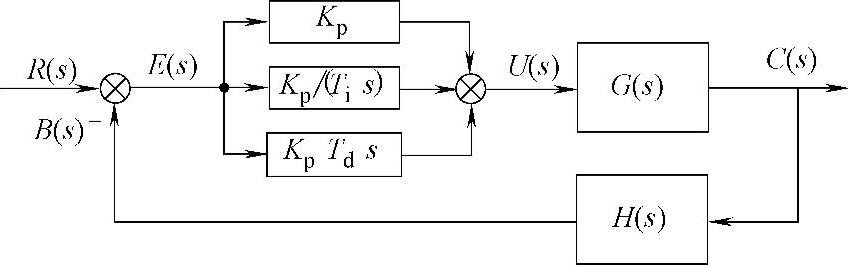
图4-30 基于PID控制的闭环负反馈控制系统(https://www.xing528.com)
设采样周期为T,将前述PID控制规律u(t)进行离散化处理,可得PID控制的第k个采样周期的离散算法u(n)为
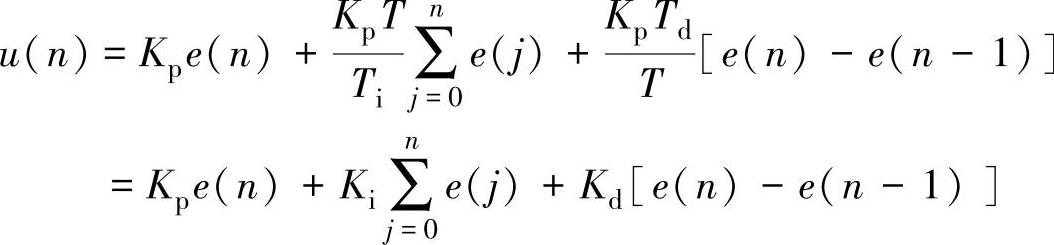
其中,比例控制部分Kpe(t)离散化为Kpe(n)。
积分控制部分 离散化为
离散化为 。令
。令 ,并称为积分控制部分的加权系数。
,并称为积分控制部分的加权系数。
微分控制部分 离散化为
离散化为 。令
。令 ,并称为微分控制部分的加权系数。
,并称为微分控制部分的加权系数。
根据PID控制的位置式离散算法,可得PID控制的第n-1个采样周期的位置式输出u(n-1)为

将上述两式u(n)与u(n-1)相减,可得PID控制的第n个采样周期的增量式离散算法Δu(n)=u(n)-u(n-1)为
Δu(n)=Kp[e(n)-e(n-1)]+Kie(n)+Kd[e(n)-2e(n-1)+e(n-2)]
于是可得PID控制的第n个采样周期的位置式输出u(n)为
u(n)=u(n-1)+Δu(n)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。