



1.PID的算法
PID控制系统原理框如图2-1所示。
PID控制器调节输出,保证偏差(e)为零,使系统达到稳定状态,偏差是给定值(SP)和过程变量(PV)的差。PID控制的原理基于以下公式:
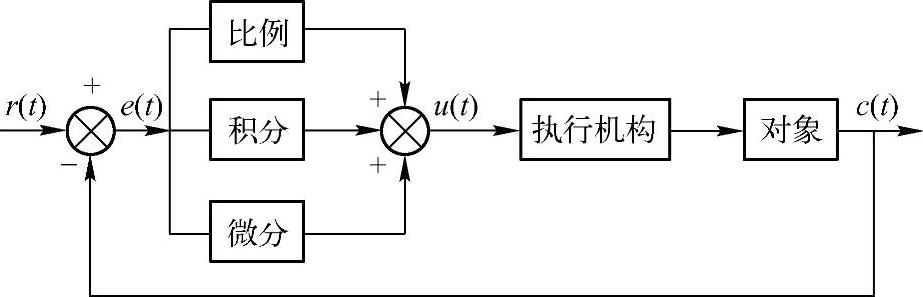
图2-1 PID控制系统原理框

公式中:M(t)是PID回路的输出,KC是PID回路的增益,e是PID回路的偏差(给定值与过程变量的差),Minitial是PID回路输出的初始值。
由于以上的算式是连续量,必须将连续量离散化才能在计算机中运算,离散处理后的算式如下:

式中,Mn是在第n个采样时刻PID回路的输出的计算值;KC是PID回路的增益;KI是积分项的比例常数;KD是微分项的比例常数;en是第n个采样时刻的回路的偏差值;en-1是第n-1个采样时刻的回路的偏差值;ex是第x个采样时刻的回路的偏差值;Minitial是PID回路输出的初始值。
再对以上算式进行改进和简化,得出如下计算PID输出的算式:
Mn=MPn+MIn+MDn (2-3)式中,Mn是第n个采样时刻的计算值;MPn是第n个采样时刻的比例项值;MIn是第n个采样时刻的积分项的值;MDn是第n个采样时刻微分项的值。
MPn=KC∗(SPn-PVn) (2-4)式中,MPn是第n个采样时刻的比例项值;KC是增益;SPn是第n个采样时刻的给定值;PVn是第n个采样时刻的过程变量值。很明显,比例项MPn数值的大小和增益KC成正比,增益KC增加可以直接导致比例项MPn的快速增加,从而直接导致Mn增加。
MIn=KC∗TS/TI∗(SPn-PVn)+MX (2-5)式中,KC是增益;TS是回路的采样时间;TI是积分时间;SPn是第n个采样时刻的给定值;PVn是第n个采样时刻的过程变量值;MX是第n-1个采样时刻的积分项(也称为积分前项)。很明显,积分项MIn数值的大小随着积分时间TI的减小而增加,TI的减小可以直接导致积分项MIn数值的增加,从而直接导致Mn增加。
MDn=KC∗(PVn-1-PVn)∗TD/TS (2-6)式中,KC是增益;TS是回路的采样时间;TD是微分时间;PVn是第n个采样时刻的过程变量值;PVn-1是第n-1个采样时刻的过程变量。很明显,微分项MDn数值的大小随着微分时间TD的增加而增加,TD的增加可以直接导致积分项MDn数值的增加,从而直接导致Mn增加。
【关键点】式(2-3)~式(2-6)是非常重要的。根据这几个公式,读者必须建立一个概念:增益KC的增加可以直接导致比例项MPn的快速增加,TI的减小可以直接导致积分项MIn数值的增加,微分项MDn数值的大小随着微分时间TD的增加而增加,从而直接导致Mn的增加。理解这一点,对于正确调节P、I、D三个参数是至关重要的。
2.PID的算法图解(https://www.xing528.com)
以上对PID控制进行了数学计算,但对于数学功底薄弱的初学者来说较难理解。以下将用图解的方法对PID参数的作用进行说明,这样更加直观易懂。
(1)纯比例控制曲线
纯比例控制曲线如图2-2所示。
图2-2中,假设被调量(如果是电炉,那么被调量是温度)偏高时,调门应关小,即PID为负作用。在定值有一阶跃扰动时,调节器输入偏差为-△e。此时Mout(即PID运算后的输出值)也应有一阶跃量△e.Kc,然后被调量不变。经过一个滞后期t2,被调量开始响应Mout。因为被调量增加,Mout也开始降低。一直到t4时刻,被调量开始恢复时,Mout才开始升高。两曲线虽然波动相反,但是图形如果反转,就可以看出是相似形。
(2)纯积分控制曲线
纯积分控制曲线如图2-3所示。
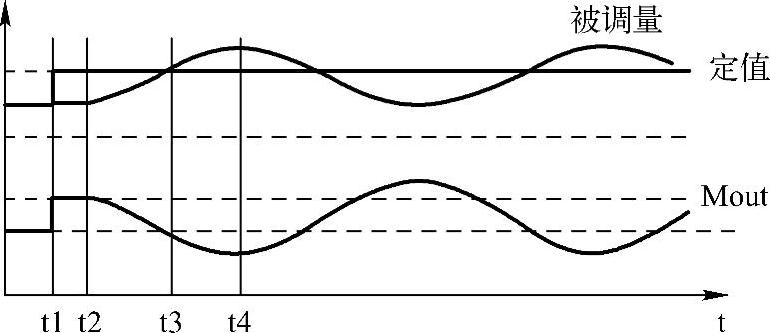
图2-2 纯比例控制曲线
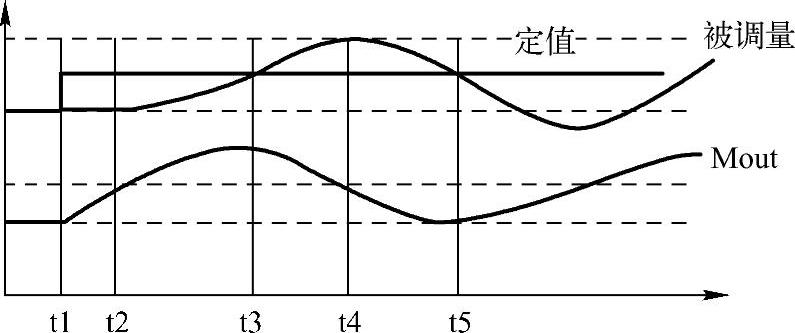
图2-3 纯积分控制曲线
积分作用下的调节曲线,因输出的响应较比例作用不明显,故被调量开始变化的时刻t2,较比例作用缓慢。在t1到t2的时间内,因为被调量不变,即输入偏差不变,所以输出以不变的速率上升,即呈线性上升。调节器的输出缓慢改变,导致被调量逐渐受到影响而改变。在t2时刻,被调量开始变化时,输入偏差逐渐减小,输出的速率开始降低。到t3时刻,偏差为0时,输出不变,输出曲线为水平。然后偏差开始为正时,输出才开始降低。到t4时刻,被调量达到顶点开始回复,但是因偏差仍旧为正,故输出继续降低只是速率开始减缓。直到t5时刻,偏差为0时,输出才重新升高。
(3)比例积分控制曲线
如图2-4所示,定值有阶跃扰动时,比例作用使输出曲线Mout同时有一个阶跃扰动,同时积分作用使Mout开始继续增大。t2时刻后,被调量响应Mout开始增大。此时比例作用因△e减小而使Mout开始降低(如图中点画线Mout(δ)所示);但是前文说了积分作用与△e的趋势无关,与△e的正负有关,积分作用因△e还在负向,故继续使Mout增大,只是速率有所减缓。比例作用和积分作用的叠加,决定了Mout的实际走向,如图2-4中Mout(δi)所示。只要比例作用不是无穷大,
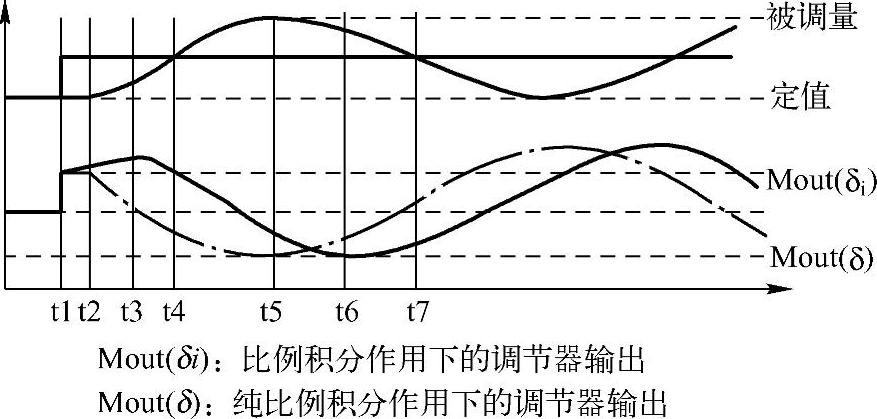
图2-4 比例积分控制曲线
或是积分作用不为零,从t2时刻开始,总要有一段时间是积分作用强于比例作用,使得Mout继续升高,然后持平(t3时刻),之后降低。在被调量升到顶峰的t5时刻,同理,比例作用使Mout也达到顶点(负向),而积分作用使得最终Mout的顶点向后延时(t6时刻)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。