



1.微分先行控制方案
微分作用的特点是能够按被控量变化率的大小来校正被控量的偏差的,但是对于如图7-36所示常规的PI+D控制系统,无论从设定值或扰动信号来看,微分环节的输入都是偏差信号做比例积分之后的值。因此,微分环节实际上不能真正达到对偏差变化率进行校正的目的,导致克服系统动态超调的作用减弱。
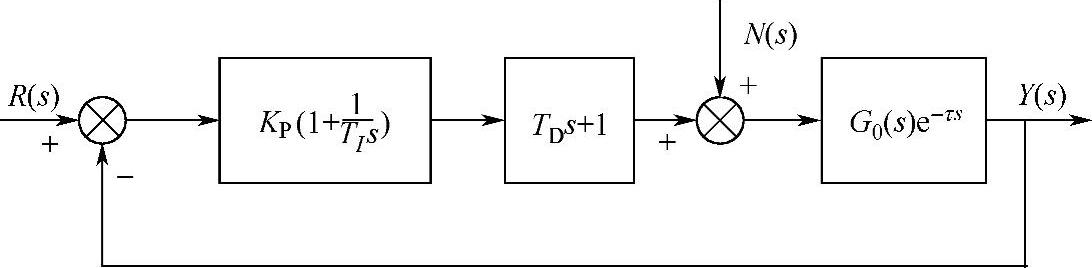
图7-36 常规PI+D控制系统结构图
微分先行控制方案是将常规PI+D控制中的微分作用提前移到反馈回路,如图7-37所示。由于反馈信号包含了被控量及其变化率,这样微分真正起到按被控量变化率进行控制的目的,可以大大减小系统的超调量。
假设被控对象的传递函数为
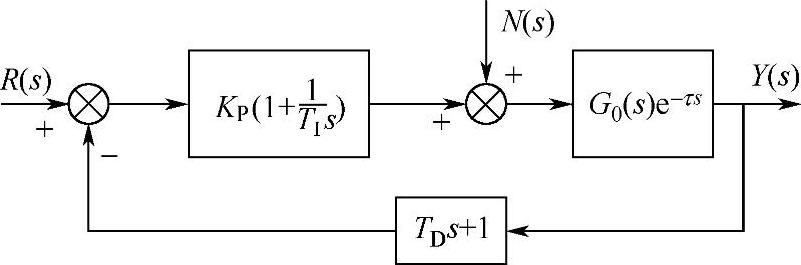
图7-37 微分先行控制系统结构图
则常规PID控制方案的闭环传递函数为

同样,微分先行控制系统的闭环传递函数为
 (https://www.xing528.com)
(https://www.xing528.com)
比较式(7-18)和式(7-19)可见,两种控制方案的特征方程完全相同,但是微分先行控制系统比常规PI+D控制系统少了一个零点,系统的超调量减小,控制质量提高。
2.中间反馈控制方案
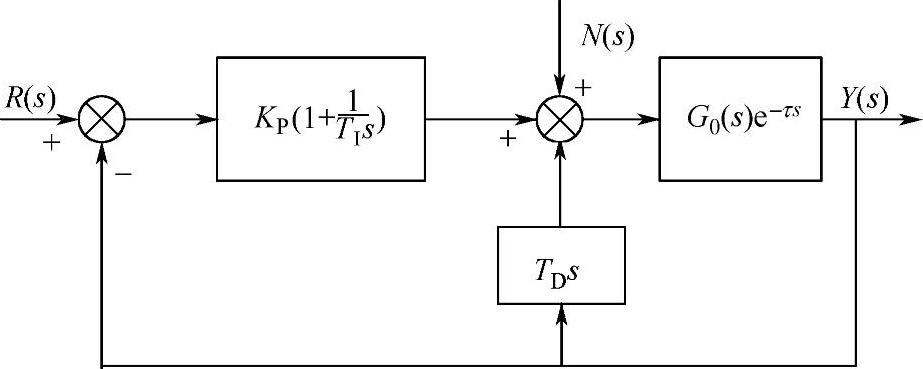
图7-38 中间反馈控制系统结构图
图7-38所示为中间反馈控制方案,系统中的微分作用是独立的,当被控量变化时,微分能及时根据其变化的速率起附加的校正作用。这种微分作用与PI控制器的输出信号无关,并且只在被控量变化时才起作用,而在静态时或被控量变化速率恒定时不起作用。
中间反馈控制方案与微分先行控制方案都是按被控量的变化速率大小进行校正的,且中间反馈控制方案是使控制系统的闭环极点位置左移,从而使系统的超调量大大下降,控制质量得到提高。假设被控对象为一阶惯性加纯滞后,即 ,采用常规PID控制(KP=0.6,TI=6,TD=0.6)、微分先行控制(KP=0.6,TI=4.8,TD=0.76)和中间反馈控制(KP=0.45,TI=4.5,TD=0.39)。系统设定值为1阶跃信号,系统稳定后在t=100s时施加幅值为50%的方波干扰信号时,系统采用PID控制、微分先行控制和中间反馈控制,三种方案系统Simulink仿真图如图7-39所示,系统的输出响应如图7-40所示。曲线来看,微分先行和中间反馈控制均能在一定程度上降低系统的超调,提高系统的控制质量,但均存在滞后,由于方案简单,有一定的使用价值。
,采用常规PID控制(KP=0.6,TI=6,TD=0.6)、微分先行控制(KP=0.6,TI=4.8,TD=0.76)和中间反馈控制(KP=0.45,TI=4.5,TD=0.39)。系统设定值为1阶跃信号,系统稳定后在t=100s时施加幅值为50%的方波干扰信号时,系统采用PID控制、微分先行控制和中间反馈控制,三种方案系统Simulink仿真图如图7-39所示,系统的输出响应如图7-40所示。曲线来看,微分先行和中间反馈控制均能在一定程度上降低系统的超调,提高系统的控制质量,但均存在滞后,由于方案简单,有一定的使用价值。

图7-39 控制系统的Simulink仿真图
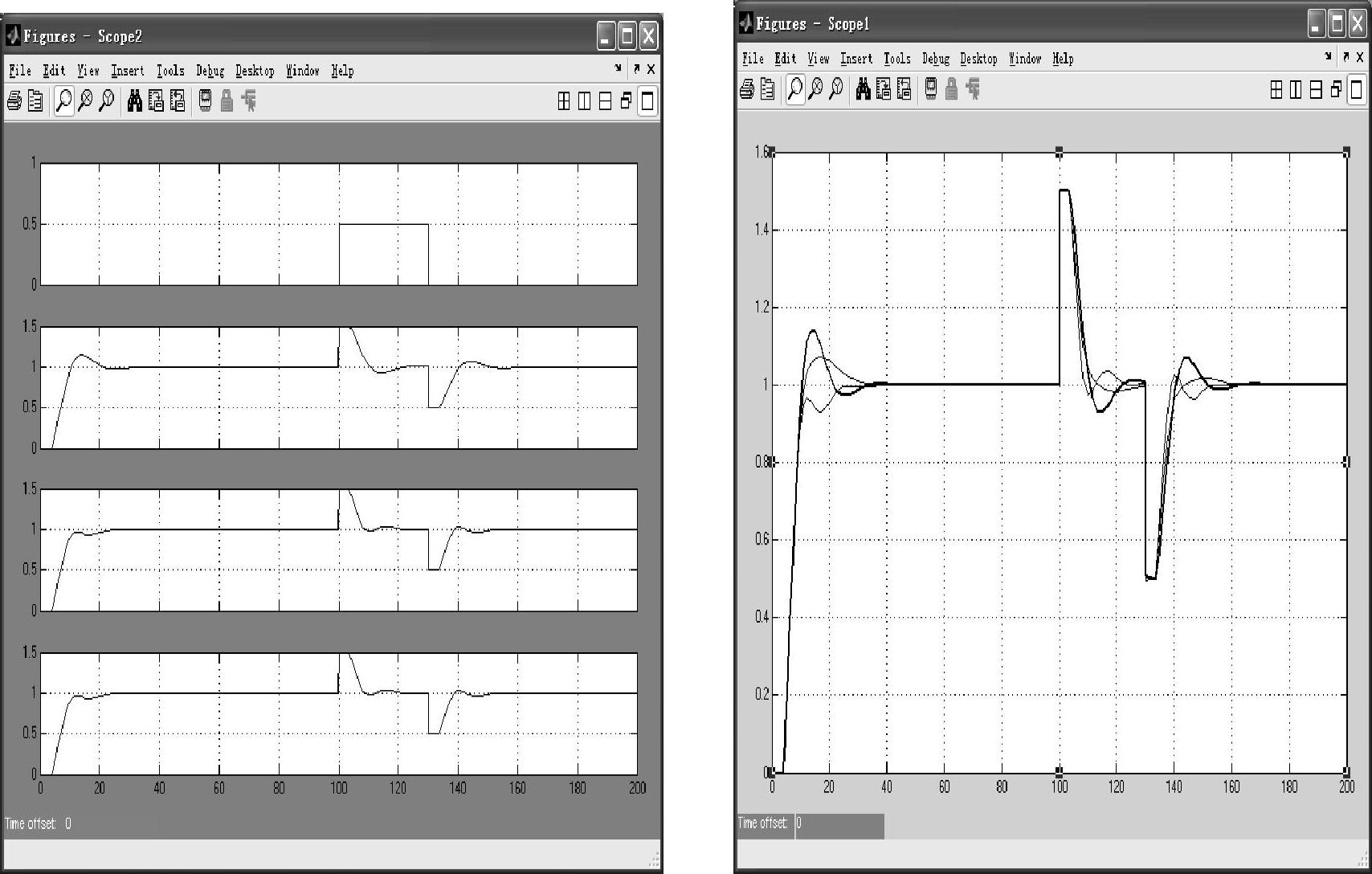
图7-40 设定值和干扰下三种方案系统的输出响应曲线
系统仿真曲线如图7-40所示,依次为干扰信号、常规PID控制、微分先行控制、中间反馈控制输出响应曲线。从图中可以看到,微分先行和中间反馈控制均能一定程度地降低系统的超调,提高系统的控制质量,但均存在滞后,由于方案简单,有一定的使用价值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。