



微型机器人的发展是和微驱动器的发展分不开的,轰动世界的突破性成就是1987年美国加州大学伯克利分校首先研制出了转子直径为60~120μm的微型静电动机。随后,麻省理工学院也研制出了100μm的静电动机。美国威斯康星大学研制出一种气动式微型机电发动机,器件尺寸仅为头发直径的几分之一,该发动机的重量不过5g,能提供5V以上的输出电压;另外,还研制出了外径为27mm、内径为8mm的齿轮以及能产生出千分之一牛顿量级的线性制动器。
除了用微型发动机和微型电动机来驱动机器人外,驱动微型机器人的方法还有振动法、尺蠖法、碰撞法、冲击法、蠕动法、蛇行法等。下面介绍国内外各种微型机器人的动作原理。
1.电磁驱动微型机器人的动作原理
一种典型的电磁驱动微型机器人向前运动的动作原理如图9-33所示,其动作过程如下:
1)初始状态(见图9-33a①),电磁线圈失电时,电磁吸力Fd为零,而弹簧张力Fs足够大,使两质量块m1、m2分离,前支撑腿静止在A点,机器人静止不动。
2)对电磁线圈通电(见图9-33a②),电磁吸力Fd作用于体内的衔铁,并且电磁吸力Fd大于弹簧力Fs,衔铁向内(向右)移动,弹簧受压。对于质量块m1,电磁吸力Fd克服弹簧力Fs使质量块m1有向右的加速度,质量块m1向右移动;对于质量块m2,电磁吸力Fd的大小等于弹簧力Fs与摩擦力F1、F2的合力,质量块m2处于静止状态。此时,间隙δ大于零,并逐渐减小。
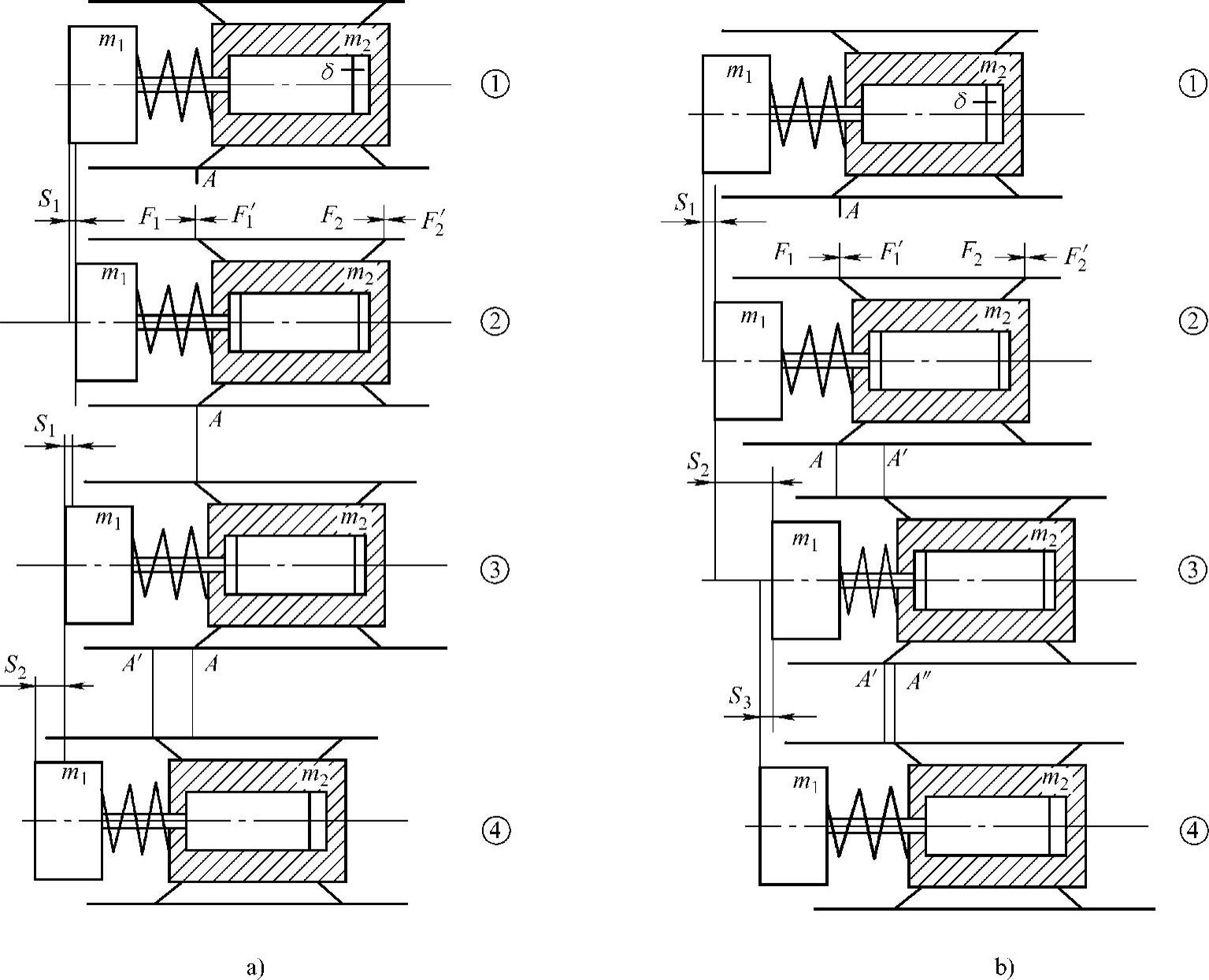
图9-33 电磁驱动微型机器人向前运动的动作原理
a)向前运动原理示意图 b)向后运动原理示意图
3)对电磁线圈断电(见图9-33a③),电磁吸力Fd迅速降为零,此时弹簧的变形能得到释放,有向外的张力Fs。对质量块m1,弹簧力Fs使得质量块有向左的加速度;对于质量块m2,由于弹簧力Fs等于摩擦力F′1和F′2的合力,质量块m2处于静止。在此过程中,衔铁向内移动的速度逐渐减小为零,然后衔铁和质量块m1向左移动,间隙逐渐增大。
4)电磁线圈仍处于断电状态(见图9-33a④),质量块m1和m2发生碰撞,并一起向左运动,弹簧力Fs为(m1+m2)整体的内力。在摩擦力F1和F2的作用下,质量块m1移动距离为S2,质量块m2从A点到A′点。重复上述过程,整个微型机器人可以一步一步地前移。后退的过程与之相反,如图9-33b所示。
2.惯性冲击式微型机器人的运动原理
惯性冲击运动的原理是由于惯性力与最大静摩擦力的大小发生变化而产生运动,具体说就是合理配置本体和配重的重量,再用一定频率、一定幅值的锯齿波电压作用于压电元件,就可实现微机器人在管道内的前后移动。如图9-34所示为一种双压电薄膜惯性冲击式微型机器人的驱动过程,分为以下四步:
1)初始状态时,不施加电压,微型机器人如图9-34a所示,静止于管道内部。
2)施加到双压电膜上的电压缓慢上升,微型机器人按如图9-34b所示的形式变化。此时,支撑腿与壁面之间的最大静摩擦力大于惯性质量块产生的惯性力,机器人支撑腿不动,双压电薄膜变形带动芯杆和惯性质量发生一定位移,机器人重心向下移动。
3)当施加电压快速减小时,微型机器人按如图9-34c所示的形式变化。此时,支撑腿与壁面的最大静摩擦力小于惯性力,机器人本体在惯性力的作用下,支撑腿移动,而惯性质量几乎保持原位,微型机器人完成一步。
4)以一定的频率重复上述过程,整个微型机器人就可以在管道内壁以一定速度向前连续运动。
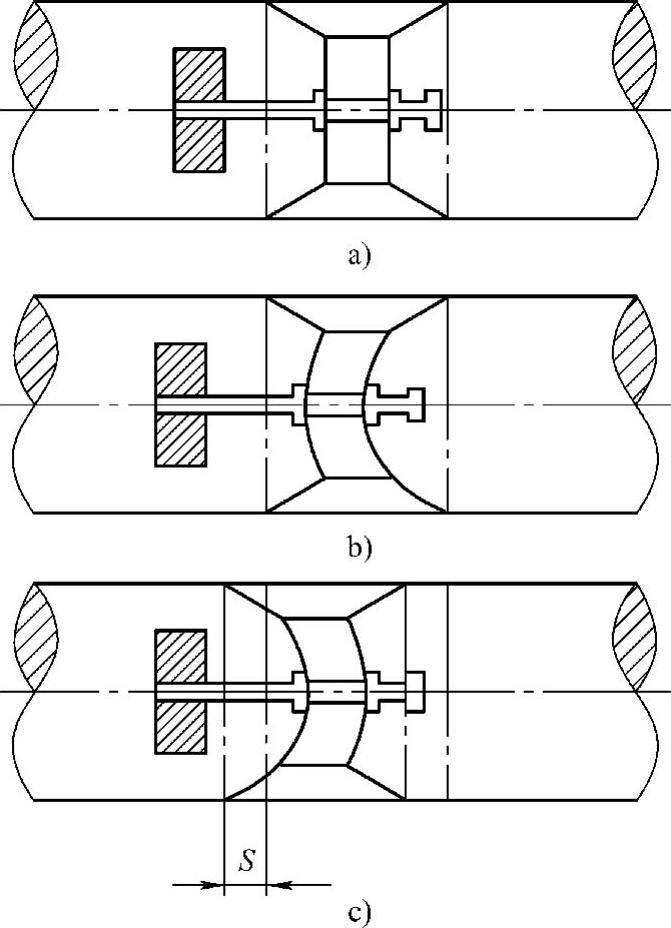
图9-34 双压电薄膜惯性冲击式微型机器人
a)状态一 b)状态二 c)状态三
机器人行走的步长和速度可以通过改变驱动电压的幅值和频率而改变,驱动电压在5~120V之间变化,频率可达到几千赫兹。其最小步长可以达到几纳米;改变驱动电压的方向,可控制机器人的前进和后退。因此,基于压电驱动的惯性冲击运动原理可以实现大运动形成、纳米级分辨率。驱动原理的核心就在于惯性力与接触摩擦力之间的关系。
3.螺旋轮式微型机器人的运动原理
螺旋轮式微型机器人主要依靠倾斜安装的两个摩擦轮在外力的作用下沿管壁产生螺旋运动。东京工业大学开发出基于螺旋轮式运动的微型机器人,该微型机器人的本体由几个单元体通过弹簧连接而成。每个单元体上均有三个支撑臂,用螺旋弹簧支撑臂上的小轮紧压在管道内壁上,产生预压力。小轮的轴线相对单元体的轴线倾斜了一个角度,当主体受到驱动力矩作用时,轮子随主体旋转并产生竖直方向的速度;当施加反向力矩时,它可以在管内反方向运动。这种运动方式类似螺旋运动,所以这种微型机器人被称为螺旋驱动的微型机器人。该机器人配备微型CCD摄像机,可用于细小工业管道的检测工作。如图9-35所示为螺旋轮式微型机器人的运动原理,如图9-36所示为其单元体结构。该微型机器人可在内径小于27mm、曲率半径不小于200mm的管道内移动,速度约34mm/s。
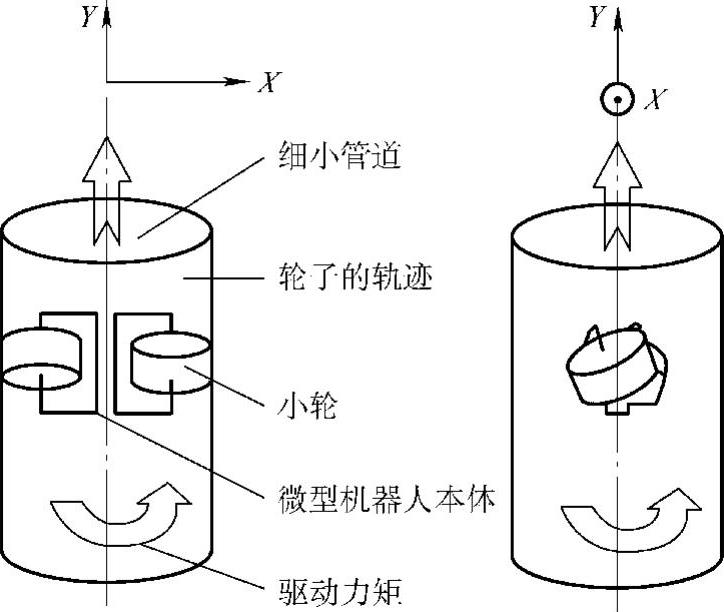
图9-35 螺旋轮式微型机器人的运动原理
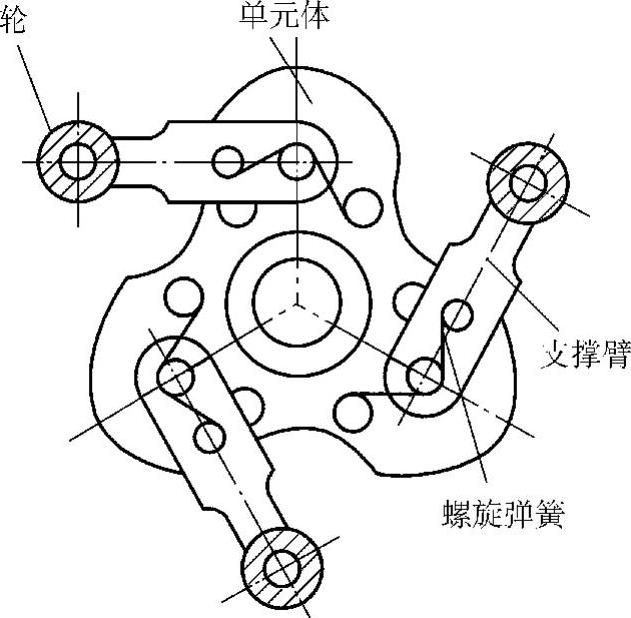
图9-36 螺旋轮式微型机器人的单元体结构
4.尺蠖式微型机器人的运动原理
尺蠖是蛾的幼虫,依靠身体伸屈而移动,如图9-37所示。日本静冈大学仿尺蠖的移动方法,研制成如图9-38所示的尺蠖式微型机器人。该机器人用4个电磁铁作为足,足间用压电晶体和弹簧连接。完成一步移动的过程是:
1)后足通电,吸住铁板。
2)压电晶体伸长。(https://www.xing528.com)
3)前足通电,吸住铁板。
4)后足断电,压电晶体收缩。
当左、右压电晶体不同时工作,就可以实现转向。
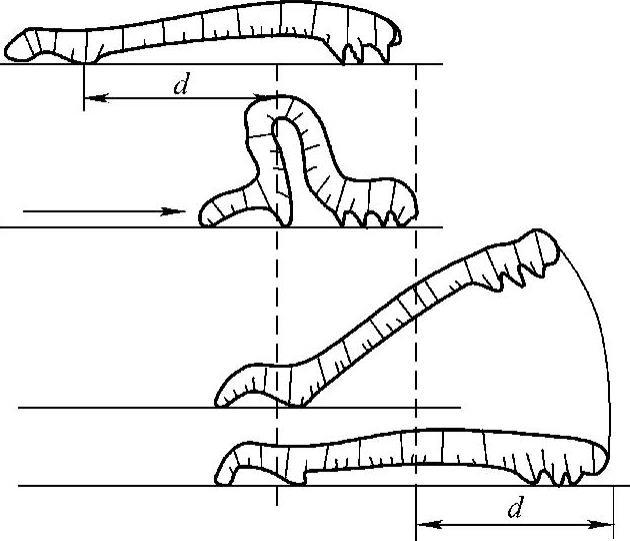
图9-37 尺蠖运动
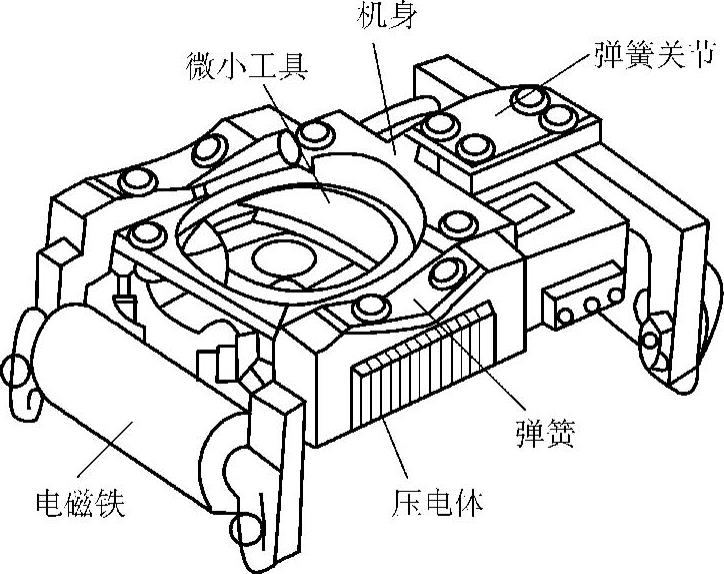
图9-38 尺蠖式微型机器人
5.足式微型机器人
这类微型机器人用腿足与移动表面接触,通过腿足与表面的相互作用产生驱动力,从而保证机器人运动。
日本MEITEC公司研制的用针形驱动器驱动的足式微型机器人如图9-39所示。它可以在直径为36mm的管道内运动,最大运动速度可达188mm/s。该微型机器人的驱动器结构如图9-40所示,由8个压电片、1个弹性基材和1个接触针构成。压电片用环氧树脂粘结在磷青铜制的弹性基材上,接触针由工具钢制成。在正弦电压驱动下,压电片产生振动并传到接触针顶端,接触针顶端产生摆动,它与管道内壁发生相互作用产生驱动力,从而使驱动微型机器人在管道内壁进行前进、后退、旋转以及螺旋运动。
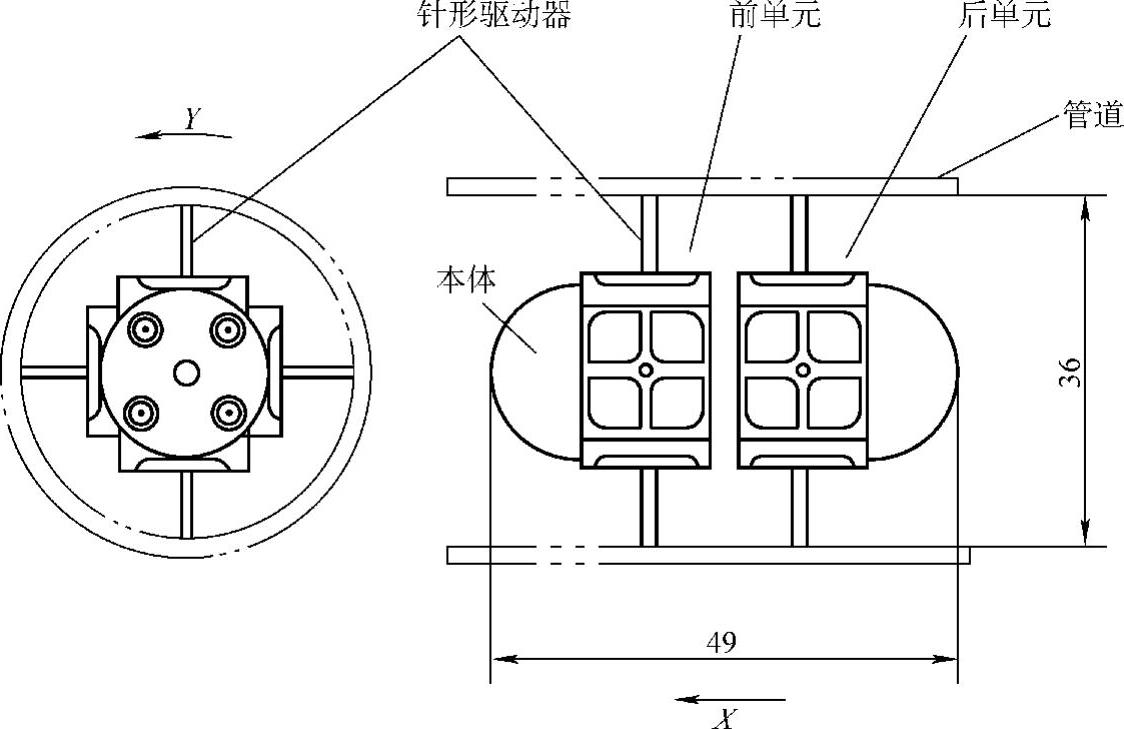
图9-39 足式微型机器人的驱动器结构
1)当1、2、5、6和3、4、7、8分别被相差90°相位的正旋波驱动,可以产生沿管道轴向的运动,即前进或后退。
2)当1、4、5、8和2、3、6、7分别被相差90°相位的正旋波驱动,可以产生沿管道切线方向的运动,即在管道内部旋转。
3)部分驱动器如1)所述驱动,部分驱动器如2)所述驱动,则微型机器人可以在管道内部实现螺旋运动。
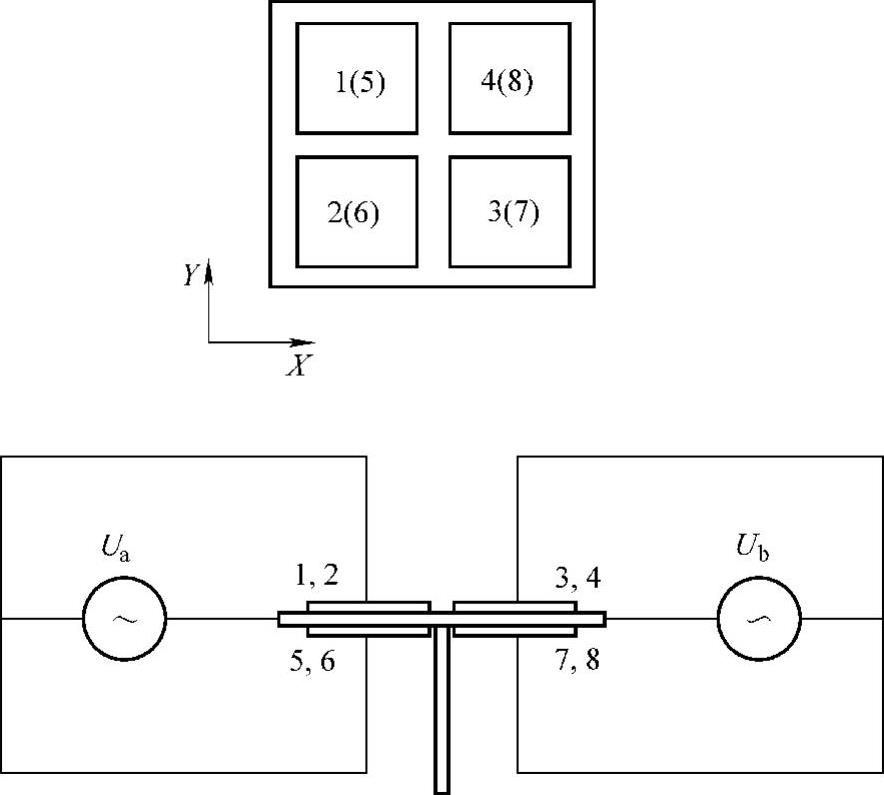
图9-40 足式微型机器人驱动器结构及运动机理
1~8—压电片
6.微型飞行器
微型飞行器(Micro Aerial Vehicle,MAV)又称为微型飞行机器人,其概念起源于20世纪90年代初。随着卫星及无人机技术的迅猛发展,利用便携式卫星数字传输装置,基层指挥人员可以以接近实时的方式收到无人机侦察到的战区级敌情的图像信息。但是,不论是卫星、间谍飞机还是无人侦察机,都很难为前线指挥员提供小范围内的具体敌情。微型飞行器的出现正迎合了这种需求。美国国防部先进研究计划署(Defense Ad-vanced Research Program Agency,DARPA)给了微型飞行器一个初步的定义:微型飞行器一般是指翼展和长度在15cm左右,重量在几十克至上百克,有效载荷20g,航速64~80km/h,留空时间20~60min,航程10km,有实时成像、导航及通信能力,可用手、弹药或飞机来部署的微型飞行机器。
世界先进国家的各大科研机构广泛开展了对微型飞行器本体机器子系统的研究和开发,并研制出了一系列原理性样机。最早研究微型飞行器的麻省理工学院林肯实验室在1996年就已经开发出昼间和夜间侦查两种型号的微型飞行器,随后MLB公司也研制出翼展为20.33cm的微型飞行器Trochoid。如图9-41所示,该机由内燃机驱动,重量为71g,最大飞行速度64km/h,飞行高度457m,并且能在较大风速下飞行18.5min。比较成功的微型飞行器当属名为“微星”(Micro Star)和“黑寡妇”(Black Widow)的微型飞行器。“微星”是由Sanders公司研制的一系列微型飞行器,如图9-42所示;“黑寡妇”是由Aero Vironment公司研制的翼展为15.24cm的微型飞行器模型,如图9-43所示。美国Lutronix公司与奥本大学合作研制了名为Kolibri的直升机微型飞行器,如图9-44所示。
图9-41 Trochoid微型飞行器
图9-42 “微星”微型飞行器
图9-43 “黑寡妇”微型飞行器
图9-44 Kolibri微型飞行器
虽然超微型飞行器的升空高度非常有限,但是随着微机电系统技术的不断发展,微型、超微型直升机的最终研制将成为可能。加利福尼亚工学院等几家单位共同研制的一种10g的扑翼式“微型蝙蝠”。GIT公司研制了名为Entomopter的扑翼式微型飞行器,翼展为25.4cm,动力为往复式化学肌肉(RCM),同时会产生电能为控制器供电。该微型飞行器已经能够以10Hz的频率扑翼,尚不能飞行。SRI国际公司研制了一种约15cm长的扑翼式微型飞行器,它由电致伸缩的聚合物人造肌肉驱动。范德堡大学研制了一种扑翼式机器人昆虫,它由多个压电驱动器驱动很细的金属结构振动,从而驱动机翼。另外,英国剑桥大学对扑翼式昆虫机器人也进行了研究。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。