



电动机的时间常数根据其机电系统动态性能的固有特性不同而分为电气时间常数τe,机械时间常数τm和机电时间常数τme以及反映电动机发热的热时间常数τθ。由于热时间常数相对而言要大得多,因而在分析电动机的动态或稳态性能时,一般不计热时间常数的影响。
对于伺服电动机而言,时间常数是反映其动态性能好坏的主要技术指标之一。无论是对直流伺服电动机、无刷直流伺服电动机,还是永磁同步伺服电动机[见式(2-43)和式(2-33)],一般情况下,经过推导都能写出如下系统方程:
由式(2-45),设TL=0,并忽略摩擦转矩,根据对时间常数的定义,得到相应的时间特性常数值。
1.机械时间常数τm
机械时间常数是表示电动机机械响应速度的特性常数,假定di/dt=0成立,在初始角速度为零的条件下对式(2-45)求解,可得到

式中 τm——机械时间常数,其值为

因为KE=KT,机械时间常数也可表示为

2.电气时间常数τe
电气时间常数是表示电流对所加电压的响应速度的特性常数,假定Ω=0成立,在初始电流为零的条件下对式(2-45)求解,可得到

式中 τe——电气时间常数,其值为

3.机电时间常数τme
机电时间常数是表示空载下在静止的电动机的端子间加上固定电压U后,当转速达到空载转速的63.2%时所用的时间。它也可由对式(2-45)求解得到。将式(2-45)整理,合并为

再把式(2-47)、式(2-50)代入式(2-51),变成(https://www.xing528.com)

式(2-52)是二阶振荡系统,其解可表示为

从式(2-53)可很明显地看出,对电动机施加阶跃电压起动过程而言,其特解之一为Ω=Ω0,即角速度呈指数函数上升,最终稳定在理想角速度Ω0上,其值为U/KE。
4.时间常数的测量
电气时间常数值可依据式(2-50),通过直接测量电阻和电感量得到。电阻和电感的测量可使用LCR测试仪。
测量电气时间常数也可以采用下面的方法:把电动机转子固定,在绕组上加上阶跃电压U,则绕组电流将呈现出图2-7所示的一阶滞后特性。将电流达到最大电流的63.2%[(1-e-1)≈0.632]时所用的时间称为电气时间常数。
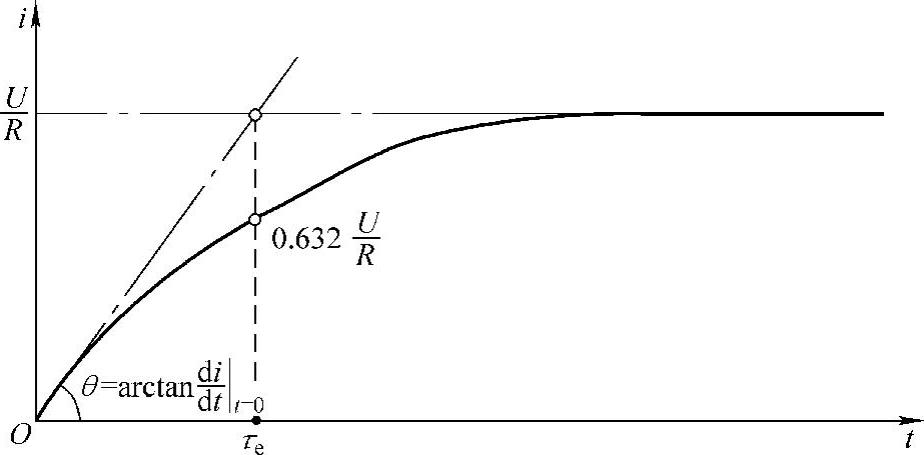
图2-7 相对于阶跃电压U的(i-t)特性
由于在机电系统中,电气过渡过程较机械过渡过程要短得多,因而一般电气时间常数远小于机械时间常数约为其1/10,故式(2-52)的解近似为式(2-46)。换句话说,电动机的机械时间常数近似于机电时间常数。因此,机械时间常数可依据机电时间常数定义的方法那样测量,其测量方法是:在绕组上加阶跃电压U,则角速度将呈现出图2-8所示的一阶滞后特性。将角速度达到最大角速度的63.2%时所用的时间叫做机械时间常数,同时该值也是机电时间常数。
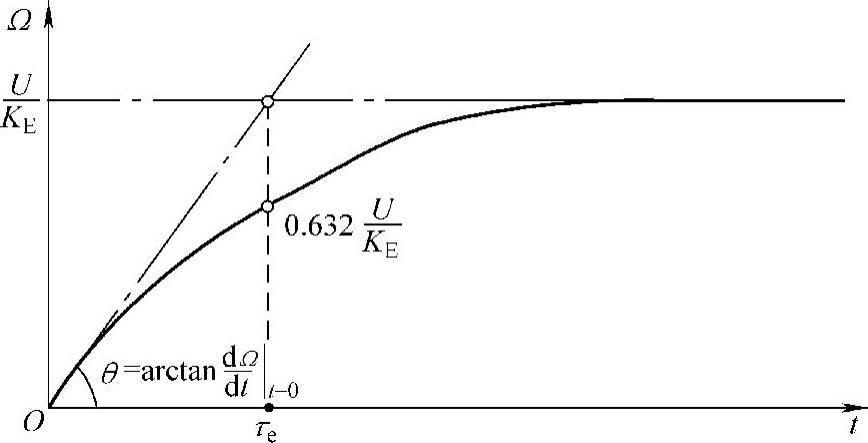
图2-8 与阶跃电压U对应的(Ω-t)特性
如今,伺服电动机发展飞快,特性时间常数也发生了很大变化,假设电气时间常数远小于机械时间常数的情况也不再满足,甚至会发生相反的状况。因此机械时间常数和机电时间常数不能再近似相等。依据机电时间常数定义的那样测量,有的状况下,电动机在起动的过程中可能会产生振荡,但系统是稳定的,振荡最终会衰减并稳定在空载转速Ω0。对式(2-52)进行改写,定义K=4τe/τm,进一步推导得到,当K>1时,电动机的起动过程如图2-9所示,电动机的转速曲线是振荡的,K增加很大时,电动机振荡的振幅将会变很大,因而系统的稳定性变差。实际的伺服系统很少会在这种状况下运行,此时伺服系统需要采取一些特殊的解决措施,例如改进电流环结构或者增加补偿环节等。
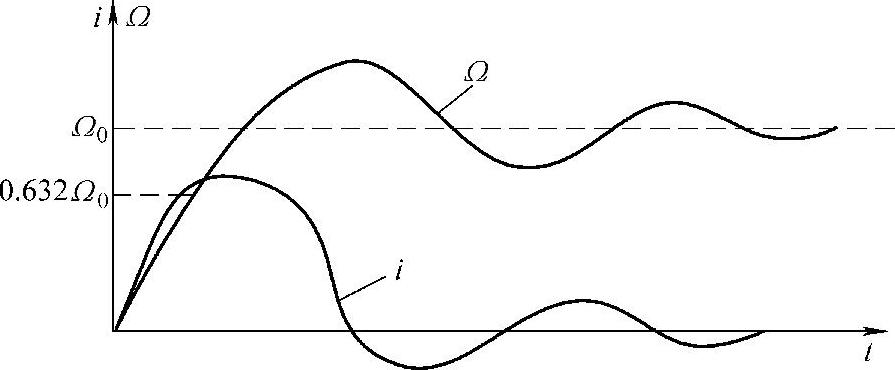
图2-9 K=4τe/τm>1时的起动过程
由于电动机的转速曲线在Ω0的上下振荡,故而对应于0.632Ω0转速点的时间很可能不是惟一的,因此时间常数的概念或意义已不明确。类似地,如果把转速首次0.632Ω0的时间定义为时间常数,尽管其含义已不相同,但并非无意义,它可以像定义系统的上升时间那样,反映出此时电动机系统的上升快慢。最后,通过对τe和τm关系的进一步分析,得到伺服电动机的机电时间常数,机械时间常数和电气时间常数之间的关系为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。