



调节直流伺服电动机转速和方向,需要对其电枢直流电压的大小和方向进行控制,目前常用的驱动控制有晶闸管直流调速驱动和晶体管脉宽调制(pulse width modulation,PWM)驱动两种方式。
晶闸管直流驱动方式主要通过调节触发装置控制晶闸管的触发延迟角,从而控制晶闸管的导通,改变整流电压的大小,使直流伺服电动机电枢电压的变化易于平滑调速。由于晶闸管本身的工作原理和其电源的特点,晶闸管导通后需要利用交流信号使其过零关闭,因此,在低整流电压时,其输出是很小的尖峰电压的平均值,从而造成电流的不连续性。
脉宽调制驱动系统开关频率高,通常为2000~3000Hz,伺服机构能够响应的频带范围也较宽,与晶闸管相比,其输出电流脉动非常小,接近于纯直流。因此,一般采用脉宽调制进行直流调速驱动。
(1)脉宽调制(PWM)调速原理。
脉宽调制即脉冲宽度调制,是利用大功率晶体管的开关作用,将直流电源电压转换成一定频率(例如2000Hz)的方波电压,加在直流电动机的电枢上,通过对方波脉冲宽度的控制,改变电枢的平均电压,从而调节电动机的转速,即“脉宽调制”的原理,具体原理图如图6-33所示。锯齿波发生器的输出电压UA和直流控制信号UIN进行比较。同时,在比较器的输入端还加入一个调零电压U0,当控制电压UIN为零时,调节U0使比较器的输出电压为正、负脉冲宽度相等的方波信号,如图6-34a所示。当控制信号UIN为正或负时,比较器输入端处的锯齿波相应地上移或下移,比较器的输出脉冲也随着相应改变,实现了脉宽调制,如图6-34b、6-34c所示。
若输出级为桥式电路,比较器的输出应分成相位相反的两路信号,去控制桥式电路(图6-35)中的V1、V4和V2、V3两组晶体管的基极。为防止V1、V4未断开,V2、V3就导通而造成桥臂短路,在线路中还加有延时电路。
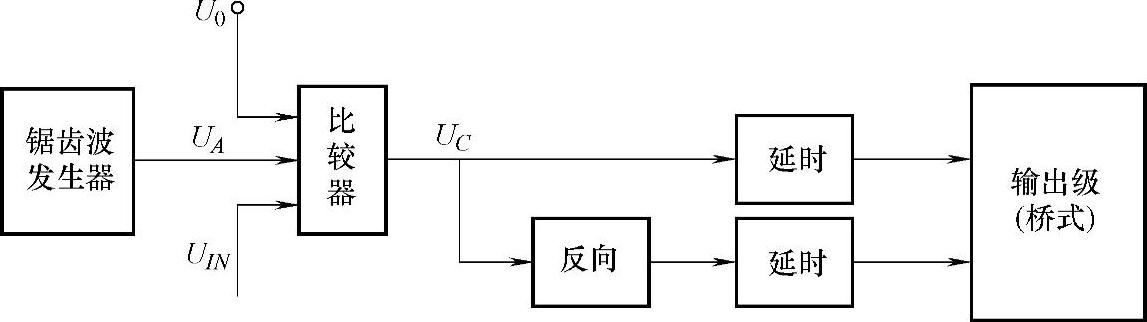
图6-33 PWM放大器原理图
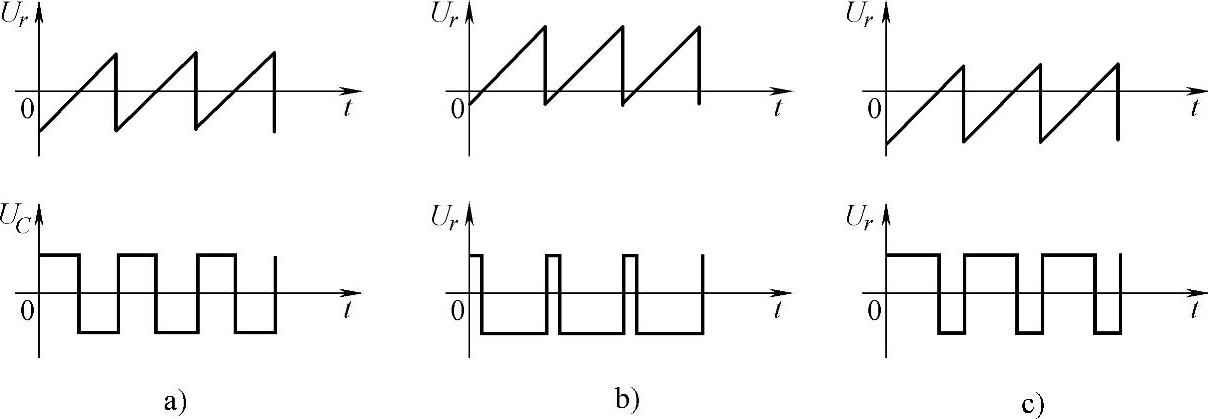
图6-34 锯齿波脉宽调制器波形图
a)控制电压为零 b)控制电压为正 c)控制电压为负
(2)开关功率放大器
PWM信号需连接功率放大器才能驱动直流伺服电机。PWM有两种驱动方式,一种是单极性驱动方式,另一种是双极性驱动方式。

图6-35 桥式输出级
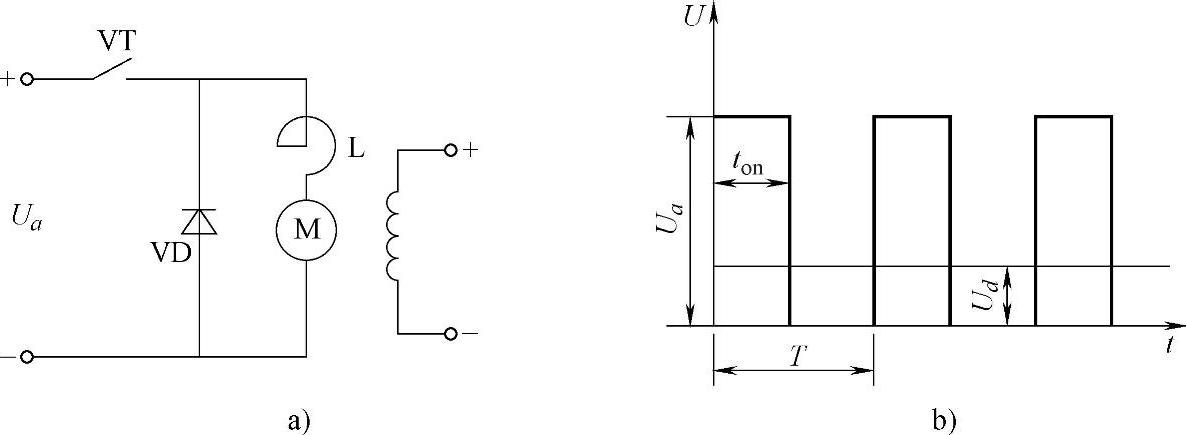
图6-36 直流伺服电动机单极性驱动原理及波形
a)原理图 b)波形图
1)单极性驱动方式
当电动机只需要单方向旋转时,可采用此种方式,原理如图6-36a所示。其中VT是用开关符号表示的电力电子开关器件,VD表示续流二极管。当VT导通时,直流电压Ua加到电动机上;当VT关断时,直流电源与电动机断开,电动机电枢中的电流经VD续流,电枢两端的电压接近于零。如此反复,得到电枢端电压波形u=f(t)如图6-36b所示。这时电动机平均电压为:

式中 T——功率开关器件的开关周期,s;
ton——开通时间,s;
ρ——占空比。
从式(6-6)可以看出,改变占空比就可以改变直流电动机两端的平均电压,从而实现电动机的调速。这种方法只能实现电动机单向运行的调速。(https://www.xing528.com)
采用单极性PWM控制的速度控制芯片有很多,常见如Texas Instruments公司的TPIC2101芯片,它是控制直流电动机的专用集成电路,其栅极输出驱动外接N沟道MOSFET(场效应晶体管)或IGBT(绝缘栅双极晶体管)。用户可利用模拟电压信号或PWM信号调节电动机速度。
图6-37所示为TPIC2101芯片应用的一个例子。TPIC2101的GD输出脚接在一个IRF530NMOS开关管的栅极,以低侧驱动方式驱动电动机,VD1(MBR1045)是续流二极管;外接供电电源是Vbat;MAN和AUTO输入端接到外电路;当AUTO端输入时,TPIC2101处于自动模式,自动模式接收占空比0%~100%的PWM信号;当MAN端输入时,TPIC2101处于手动模式,手动模式接收0~2.2V差动电压信号。
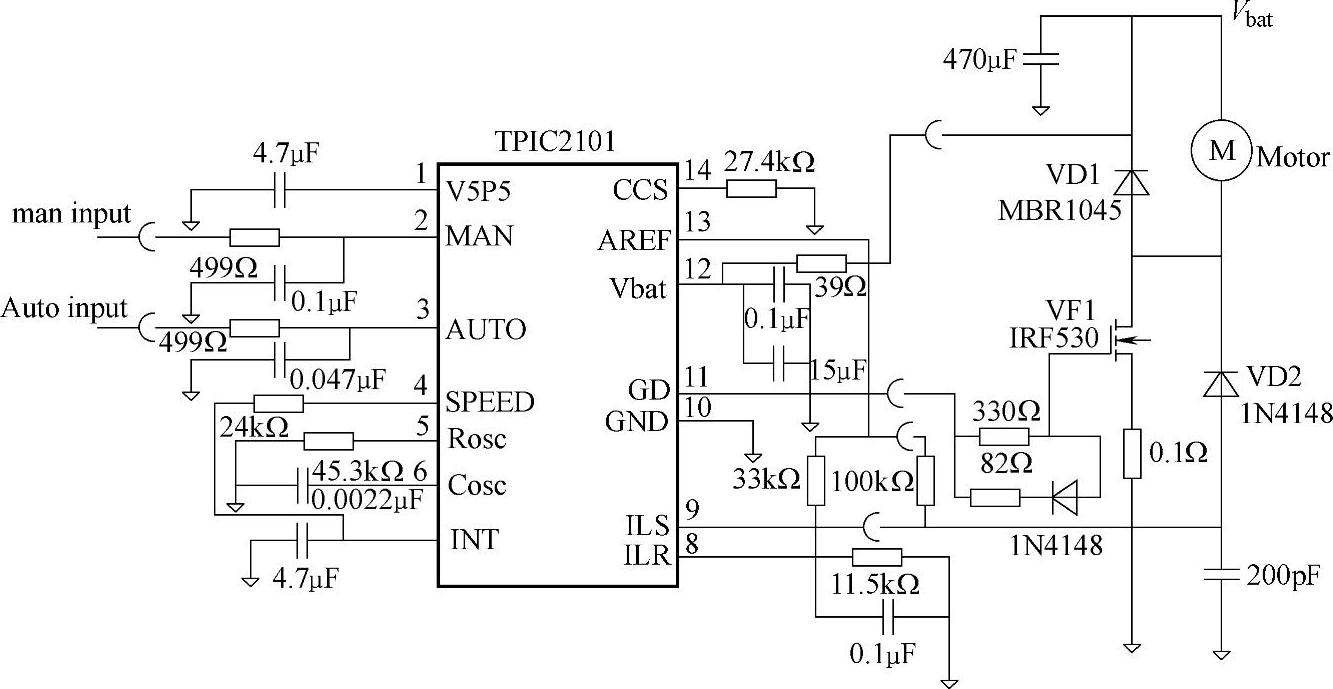
图6-37 TPIC2101的应用电路
2)双极性驱动方式
这种驱动方式不仅可以改变电动机的转速,还能够实现电动机的制动、反向。这种驱功方式一般采用四个功率开关构成H桥电路,如图6-38a所示。
VT1~VT4四个电力电子开关器件构成了H桥可逆脉冲宽度调制电路。VT1和VT4同时导通或关断,或者VT2和VT3同时通断,使电动机两端承受+US或-US。改变两组开关器件的导通时间,也就可以改变电压脉冲的宽度,得到的电动机两端的电压波形如图6-38b所示。
如果用ton表示VT1和VT4导通时间,开关周期为T,占空比为ρ,则电动机电枢两端平均电压为:

直流电动机双极性驱动芯片种类很多,如SANYO公司生产的STK6877是一款H桥厚膜混合集成电路,图6-39所示为其内部结构框图,它采用MOSFET作为输出功率器件。一般可作为复印机鼓、扫描仪等各种直流电动机的驱动芯片。
图6-40所示为STK6877的应用电路。输入端是A、B、PWM。A、B不同状态的组合,可实现不同的功能。如A为高电平且B为低电平表示电动机是正向的状态;A为低电平且B为高电平为反转状态。
如ST公司生产的L298N,是一款高电压、高电流全桥式驱动器,单个芯片可以驱动两个直流电动机。该芯片采用15脚封装,图6-41为其内部结构框图。其采用标准TTL电平信号控制,可以用来驱动直流电动机、步进电动机、继电器线圈等感性负载。
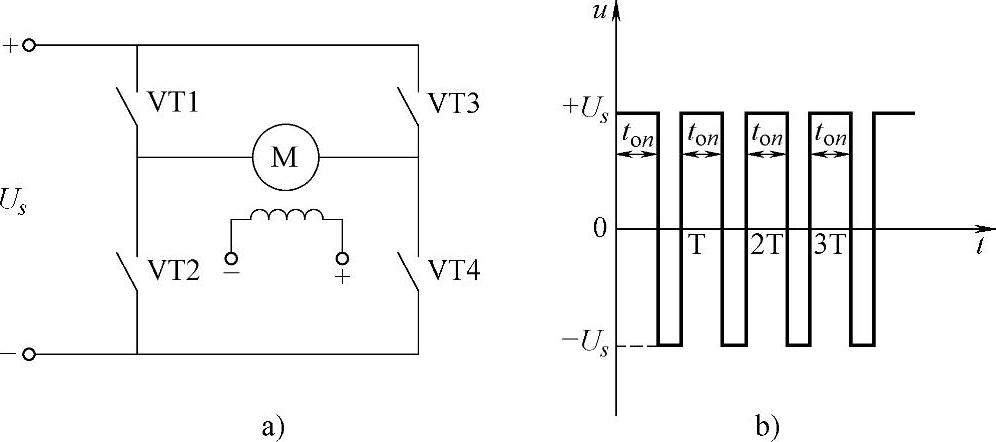
图6-38 直流伺服电动机的双极性驱动原理及波形
a)原理图 b)波形图
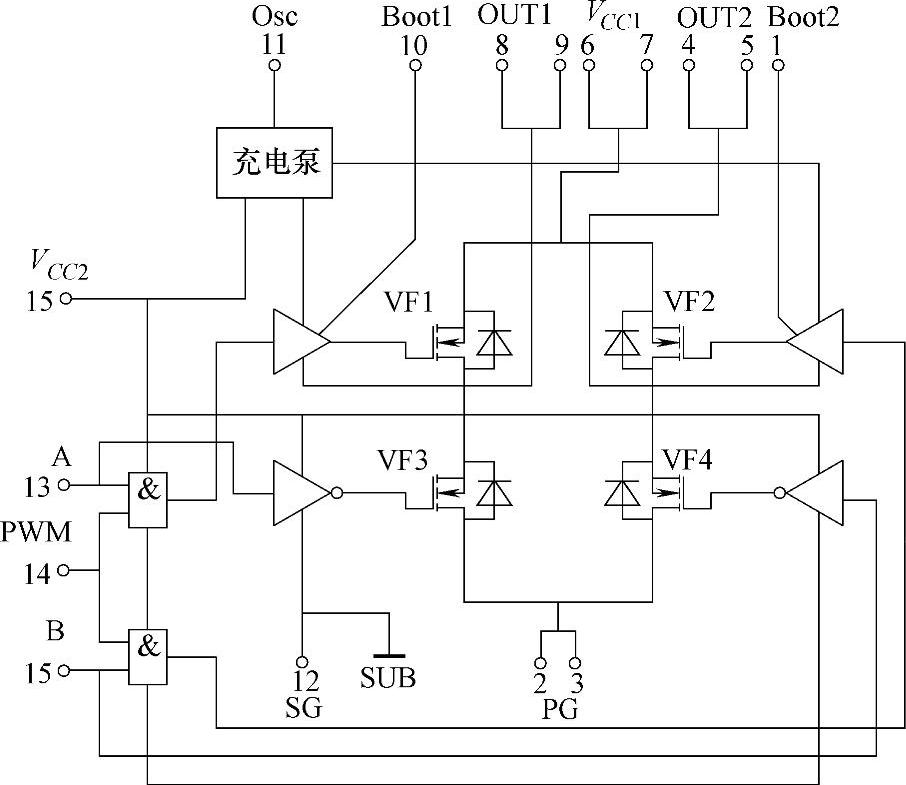
图6-39 STK6877内部结构
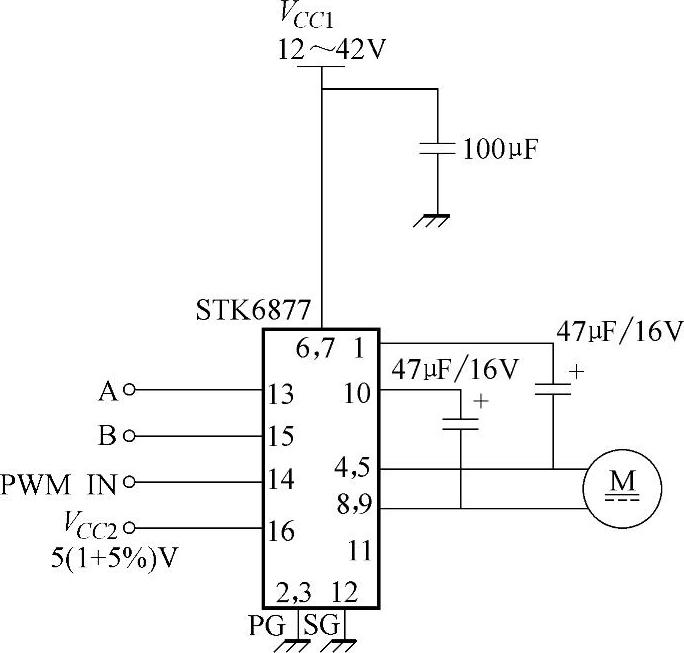
图6-40 STK6877的应用电路
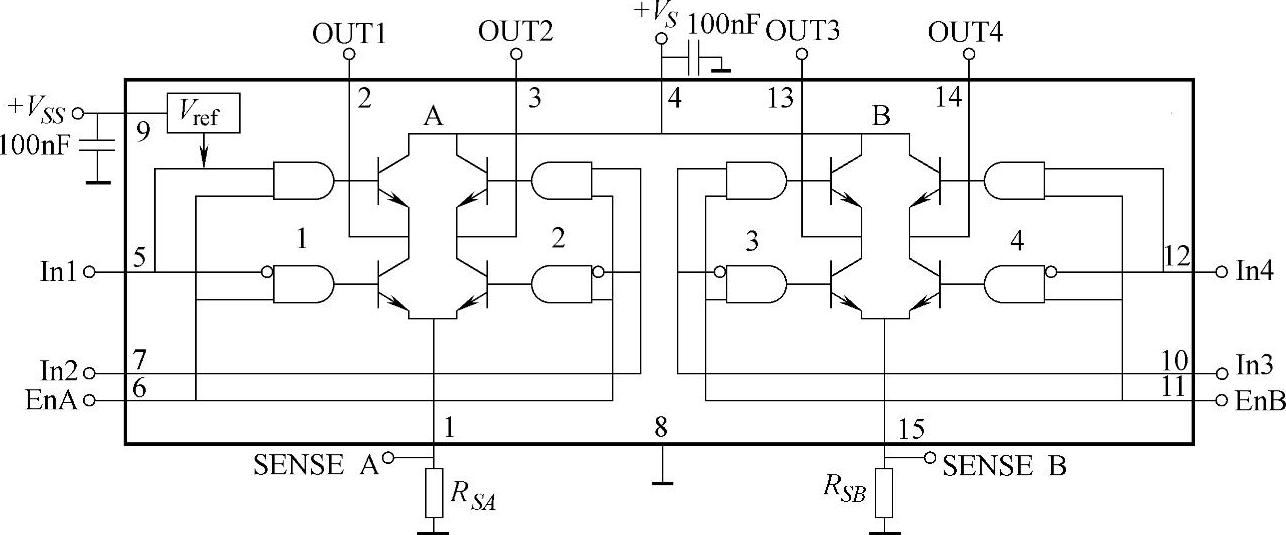
图6-41 L298N内部结构
引脚2、3和13、14分别为A和B的输出端,与负载直流电动机相接;引脚5、7和10、12分别为A、B的输入端,接TTL电平;引脚6、11分别为A和B的使能端。若能使信号为低电平,则无论输入控制端5(10)和7(12)为何电平,直流电动机总处于停止状态;若能使信号为高电平,5(10)为高电平,7(12)为低电平时,电动机正转,反之,电动机反转,两者为相同电平时,电动机快速停。L298N驱动直流电动机电路图如图6-42所示。
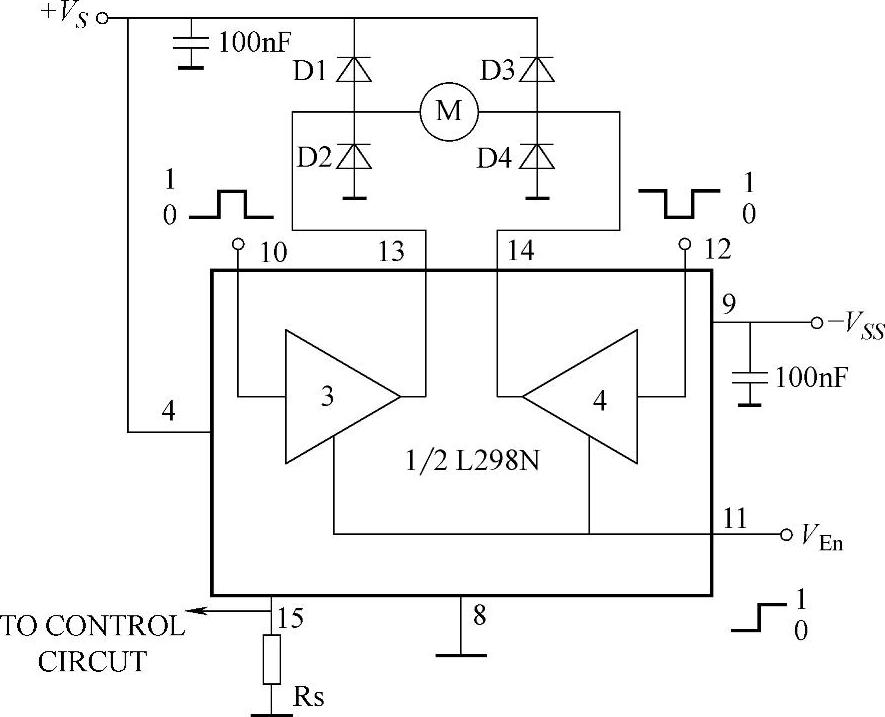
图6-42 L298N驱动直流电动机电路图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。