



这一节,我们先来考虑一个通过可控整流桥连接在一起的直流和交流配电系统,如图13-17所示。交流侧的源子系统等效电路带电力电子负载;在直流侧,整流器后接有滤波器,以减小输出直流的脉动。代表母线等效负载的恒功率负载和恒电压负载连接与输出直流母线。这一节,我们用广义状态空间平均法研究系统的稳定性。
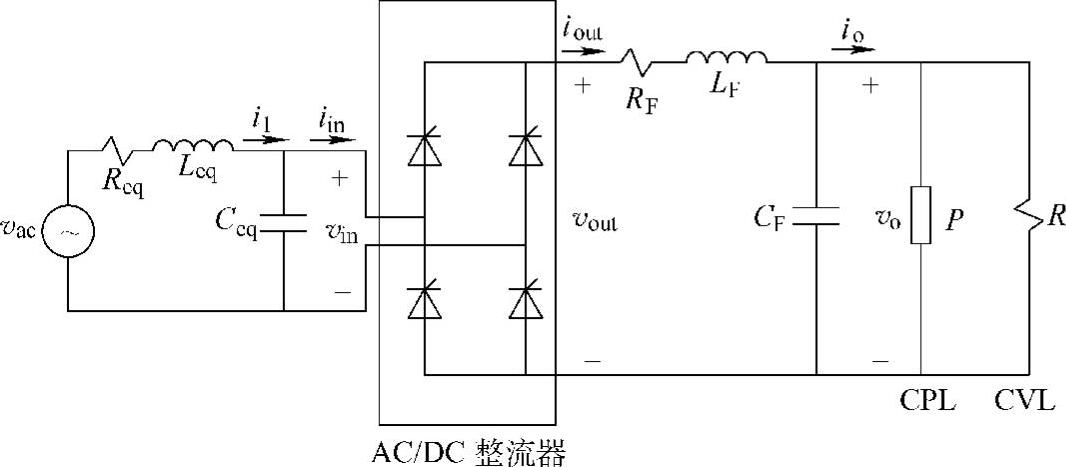
图13-17 混合交直流系统的恒功率和恒电压负载的相互连接
基于广义状态空间平均法的混合系统模型
广义状态空间平均法是电力电子电路的大信号建模方法,这一点已在第7章阐述过。为利用这一方法,我们首先来考虑可控整流的等效电路模型,如图13-18所示。
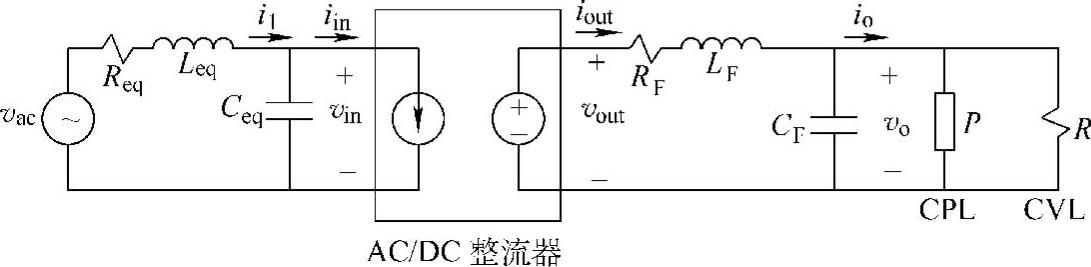
图13-18 混合配电系统的整流器等效电路
上图中整流电流的输入和输出分别为:

式中变换函数u(t)按图13-19定义:
图13-18电路的电压和电流方程:

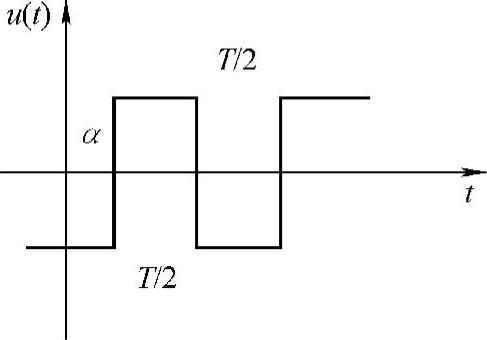
图13-19 变换函数
混合系统的特性可以通过式(13-38)和式(13-39)来描述,其中式(13-38)是交流和直流系统互联的桥梁。
13.4.1.1 一阶谐波估算
在广义状态空间平均模型的一系列方程中,实际的状态空间变量是电路状态变量的傅里叶系数,在本例中,即:i1、vin、iout和vo。采用一阶估算时,模型中共有12个实际的状态变量,即:

假设电压是正弦的,则电压源的零阶和一阶分量可写为:

假设和混合系统输出直流母线的电压的平均值相比,实际电压的脉动很小,那么非线性项(I/va)可写为:
 (https://www.xing528.com)
(https://www.xing528.com)
经过一系列的数学运算,触发角为零时的广义状态空间平均模型可表达为:

式中,X为式(13-40)定义的含有12个状态变量的矢量。由于恒功率负载的非线性特征,系统模型也是非线性的。将式(13-43)在工作点处线性化后,可得到研究系统小信号稳定的线性模型:
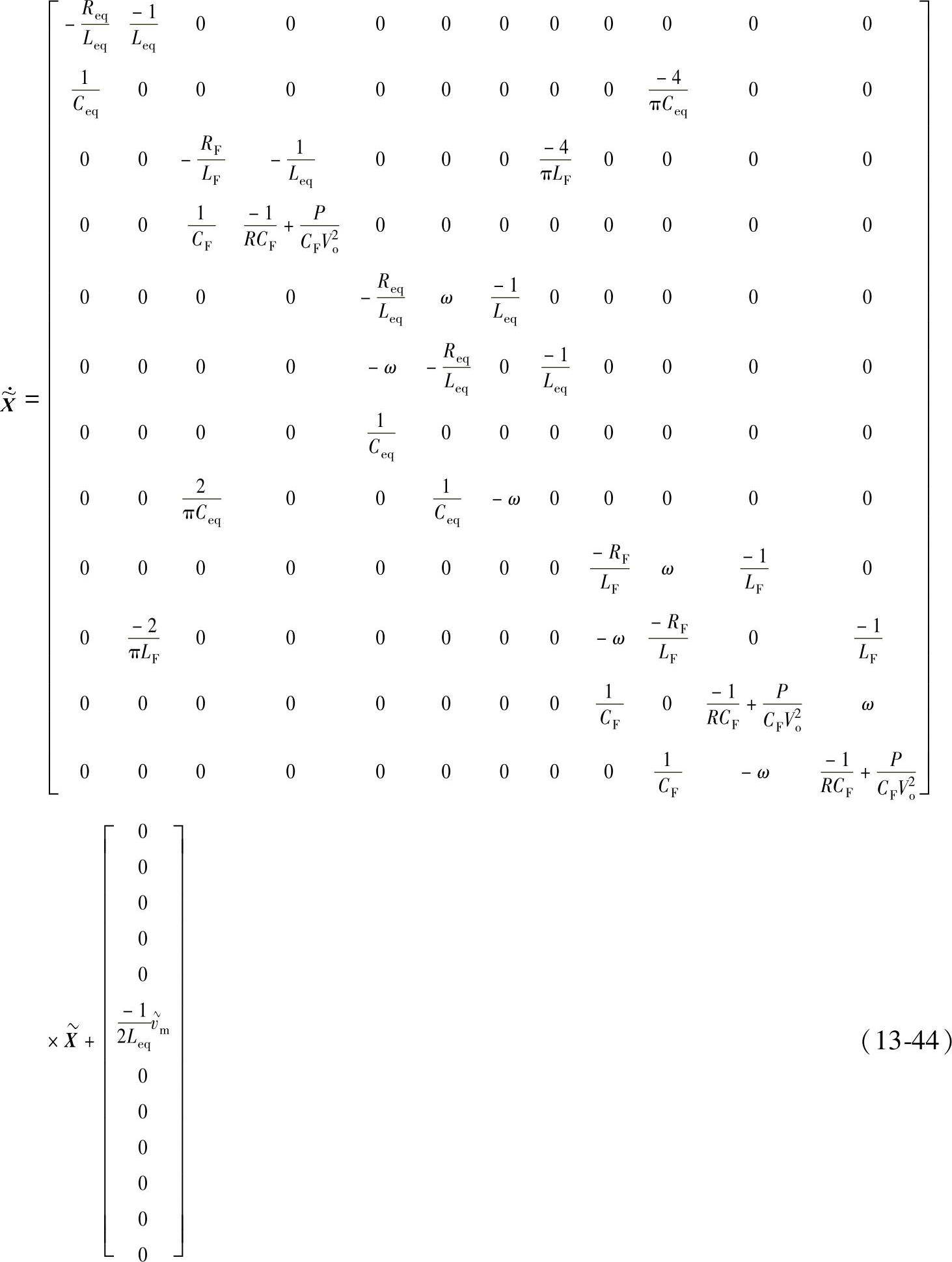
小信号稳定问题可以通过式(13-44)的线性微分方程来求解。我们来看一个具体的算例,参数见表13-3。
表13-3 混合交直流系统参数

我们用式(13-44)的微分方程对混合系统进行了模拟,研究了不同恒功率和恒电压负载时系统的稳定性。如果小信号系统稳定,式(13-44)中矩阵的特征值的实部是非负的,由此可以确定小信号稳定的充分和必要条件。图13-20画出了稳定和非稳定区域。稳定性的充分和必要条件只有在稳定区才成立。
13.4.1.2 交流侧忽略直流分量直流侧忽略交流脉动
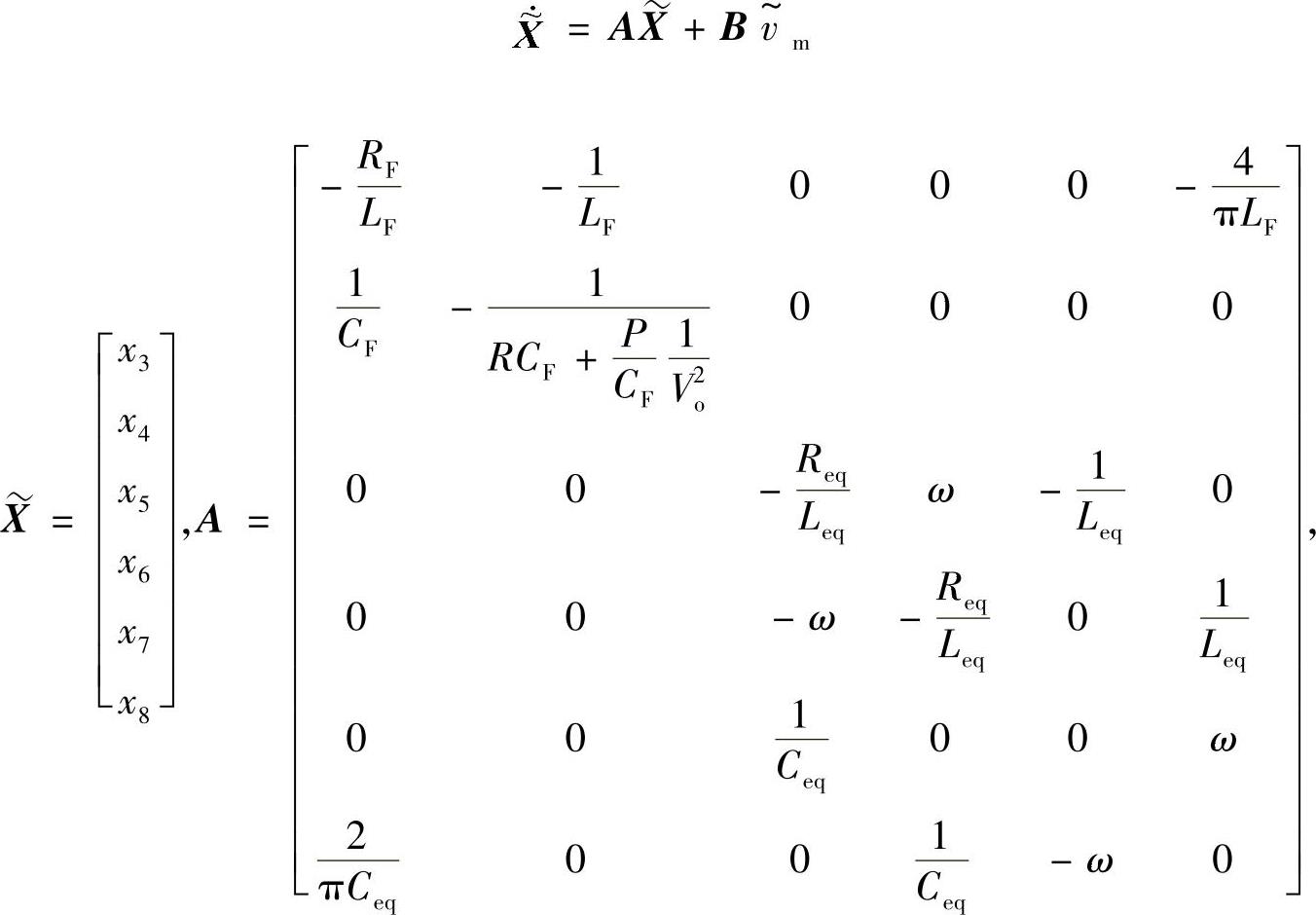
这一节中,我们忽略脉动,只考虑直流子系统的平均值;忽略直流分量和谐波分量,只考虑交流子系统信号的基波分量。对于图13-17所示系统,模型中共有6个状态变量,即:
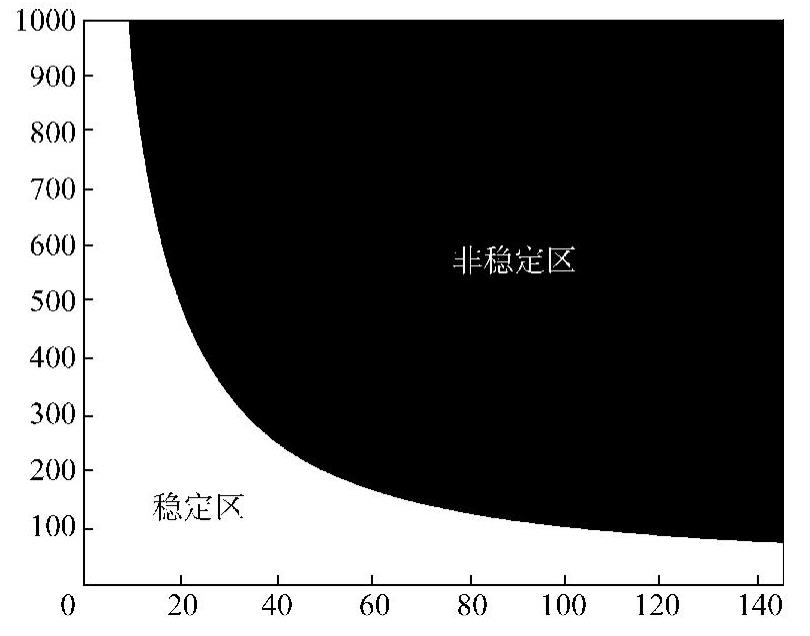
图13-20 图13-17系统在P(kW)—R(Ω)平面基于一阶模型的稳定和非稳定区域
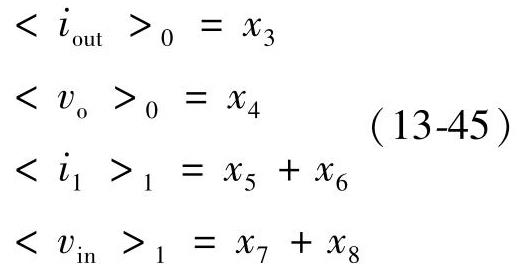
通过对时间求导、卷积运算,并进一步将源电压的傅里叶系数及u(t)代入,整流器零触发角的广义状态空间平均模型可写为:
系统的稳定性仍然可用式(13-46)~式(13-49)的一系列方程来研究。我们曾经模拟了由表13-3定义的混合系统。对于其他恒电压和恒功率负载,也做了相应的研究。图13-21给出了稳定区和非稳定区的划分。
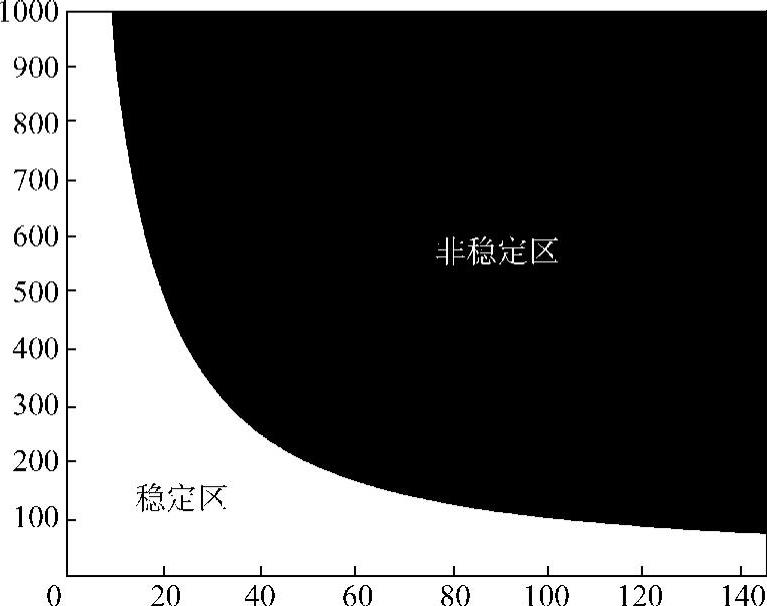
图13-21 图13-17系统在P(kW)—R(Ω)平面基于简化模型的稳定和非稳定区域
图13-21中的稳定区域比图13-20中的稳定区域略大,这意味着简化模型不能在靠近稳定区边缘处运行时系统的稳定性存在问题。为了保证稳定性,我们需要确认恒功率和恒电压负载均为进入图13-20所示的非稳定区。
一种估算系统稳定条件比较简单的方法是分别考虑交流和直流系统。当然这种方法不太精确,也不能保证临界稳定。假设整流器的输出电压是恒定的,假设V2oRFCF/LF=200W,如果恒功率负载的功率小于恒电压负载的功率加上200W,那么直流系统就是稳定的。这个结论成立的前提是交流子系统稳定。对于交流系统,忽略RF并设整流器触发角为零,V2in,rmsReq.Ceq./Leq.=13.225W。如果恒功率负载的功率小于恒电压负载的功率加上13.225W,那么交流子系统就是稳定的。可见,交流子系统的稳定性好于直流子系统的稳定性。综上所述,混合系统的稳定性取决于直流子系统。事实上,直流子系统比交流子系统更快达到负阻抗不稳定条件。我们必须再次指出,这只是一种估算。精确条件以图13-20描述的为准。考虑的谐波阶数越高,方法的精确度也越高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。