



双自由度切齿啮合被展成齿轮齿面Σ2在σ2里的方程为
(r2)2=(r′)2-sk2 (4-82)
利用式(4-3)对式(4-66)进行σ02→σ2坐标变换,然后代入式(4-82)得

式(4-83)中θ1和φ2是被展成齿面Σ2的参数,为了便于对齿面Σ2进行分析,以新参数μ2和θ2代换φ2和θ1。
在式(4-83)中,令z2=z02-s=p2μ2,将式(4-69)的z02代入此式,得

前面已知

将式(4-52)、式(4-53)和式(4-84)代入式(4-85),并考虑式(4-73),经化简后得

根据图4-5及式(4-80)和式(4-84),式(4-83)可变换成

图4-6为根据图4-4和图4-5绘成的啮合线与两轮的相对位置。图4-6中轮1的“负侧面”(θ1<0)与轮2的“正侧面”(θ2>0)接触。两轴线公垂线上点P为节点。轮1过节点P基圆柱的切平面与轮2过节点P基圆柱的切平面的交线N1N2为啮合线。对于最常用的紧密型传动,啮合线N1N2通过节点P。M为啮合线上的任一点。
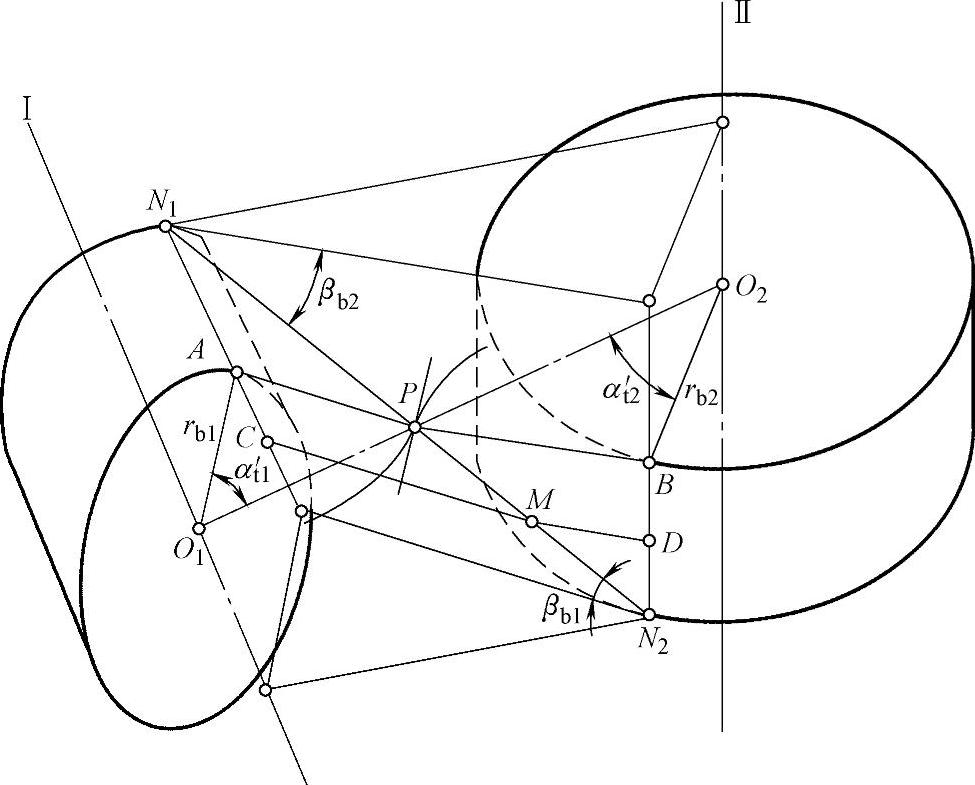
图4-6 啮合线与两轮的相对位置(https://www.xing528.com)
由图4-6得

考虑到“负侧面”θ1和θ2取负值,“正侧面”θ1和θ2取正值,即

上二式中双符号项,上面符号用于轮1“负侧面”与轮2“正侧面”啮合(见图4-6);下面符号用于轮1“正侧面”与轮2“负侧面”啮合。
将以上四式代入式(4-88)得

将 
代入式(4-89)得

将式(4-90)代入式(4-86)得

将式(4-91)代入式(4-87)得

计算齿面Σ2的相关参数时,先给定s值,给出θ1值,由式(4-84)求得μ2值,由式(4-90)求得θ2值,由式(4-93)求得δ值,代入式(4-92),得到齿面Σ2上的一个点;改变θ1值可得到齿面Σ2上一条与s值对应的接触迹线;改变s值时即可得到瞬时接触迹线族形成的齿面Σ2。由式(4-92)可知,齿面Σ2是渐开螺旋面。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。