



滚刀展成蜗轮时,啮入端的第一刀刃在蜗轮齿面上形成前过渡曲面C1,啮出端的末刀刃在蜗轮齿面上形成后过渡曲面C2,第一刀刃和末刀刃之间各刀刃组成的滚刀产形面Σ1展成蜗轮齿面接触区Σ2。
对于蜗轮齿面上存在瞬时接触线奇点轨迹曲线N的标准传动,原接触区Σ2A和新接触区Σ2B相切于曲线N,构成接触面整体Σ2。但是,对于修形传动,蜗轮齿面Σ2A和曲线N不复存在;接触区断开成Σ2B和Σ2C两部分,它们或者互相重叠,或者完全分开。
需要通过蜗轮齿面结构分析,判断前后过渡曲面C1和C2及接触区Σ2B、Σ2A或Σ2C,哪些被切去,哪些留下来构成蜗轮齿面。利用相位分析法[15],远离蜗轮齿实体的曲面被切去,靠近蜗轮齿实体的曲面将留下来。
1.前后过渡曲面的方程
蜗轮齿面结构分析要用到前后过渡曲面的方程。近似地取由Lw确定的垂直于蜗杆轴线的两截平面内蜗杆螺旋面的截线R1和L1为第一刀刃和末刀刃。蜗杆螺旋面方程式(6-64)与式(8-2)或式(8-3)联立即为第一刀刃R1曲线或末刀刃L1曲线的方程,即

式中双符号项“±”:第一刀刃R1取正号;末刀刃L1取负号。
刀刃R1和L1相对于蜗轮运动,其轨迹曲面分别为前过渡曲面C1和后过渡曲面C2。将式(8-23)中的第一式进行σ1→σ2坐标变换得

式(8-24)与式(8-23)中的后两式联立,即为在σ2里前后过渡曲面的方程。
2.各曲面对应点的相位计算
垂直于蜗轮轴线取z2=z0的截平面,将该截面投影到(O2;i2,j2)的坐标平面上。
根据图7-1中环面蜗杆与蜗轮的相对位置,蜗轮齿的实体位置如图8-6所示。
在z2=z0的截平面内,前后过渡曲面C1和C2的截线分别为ΓC1和ΓC2,蜗轮齿面接触区Σ2的截线为Γ2。各截线上取半径为RB的点A、B和C。由(https://www.xing528.com)

与蜗轮齿面方程式(7-58)联立求解,得到Γ2上点A的坐标(x2A,y2A)。式(8-23)与式(8-24)联立求解,得到ΓC1上的点B(x2B,y2B)和ΓC2上的点C(x2C,y2C)。
由j2到截线Γ上任一点矢径的有向角θ由下式求得:

分别将点A、B和C的坐标值代入式(8-26),得到各点的相位角θ2、θC1和θC2。
在图8-6中,点A、点B和点C的相位角差为
ΔθC1=θ2-θC1 (8-27)
ΔθC2=θ2-θC2 (8-28)
换算成半径为RB圆上弧长差线值为

图8-6中点A的相位角最大,Γ2离蜗轮齿的实体最近,Γ2留在蜗轮齿面上,ΓC1和ΓC2被切掉。
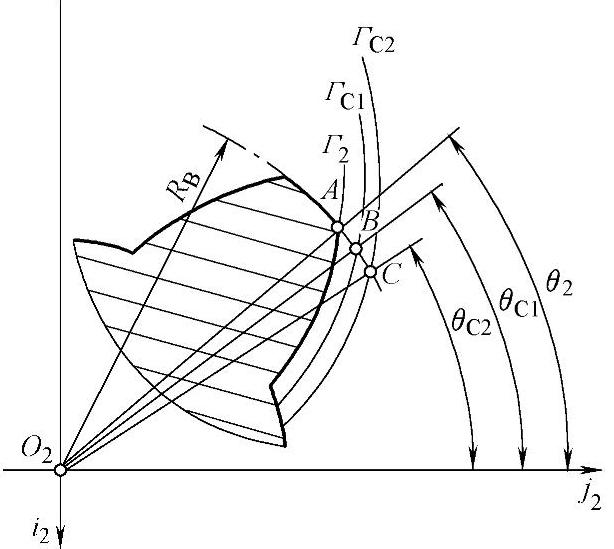
图8-6蜗轮齿的实体与各曲面的相对位置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。