



6.3.3节介绍的基于dq旋转坐标系的电流型整流器控制方法中,需要对交流电压和交流电流进行dq旋转坐标变换,同时需要准确的电源电压相位角信息。为了避免坐标变换,本节将讨论基于调制比M和相位角δ的电流型整流器控制策略。根据功率指令求出所需的调制比M和相位角δ,由这两个参数可以直接计算出PWM脉冲,进而驱动整流器。
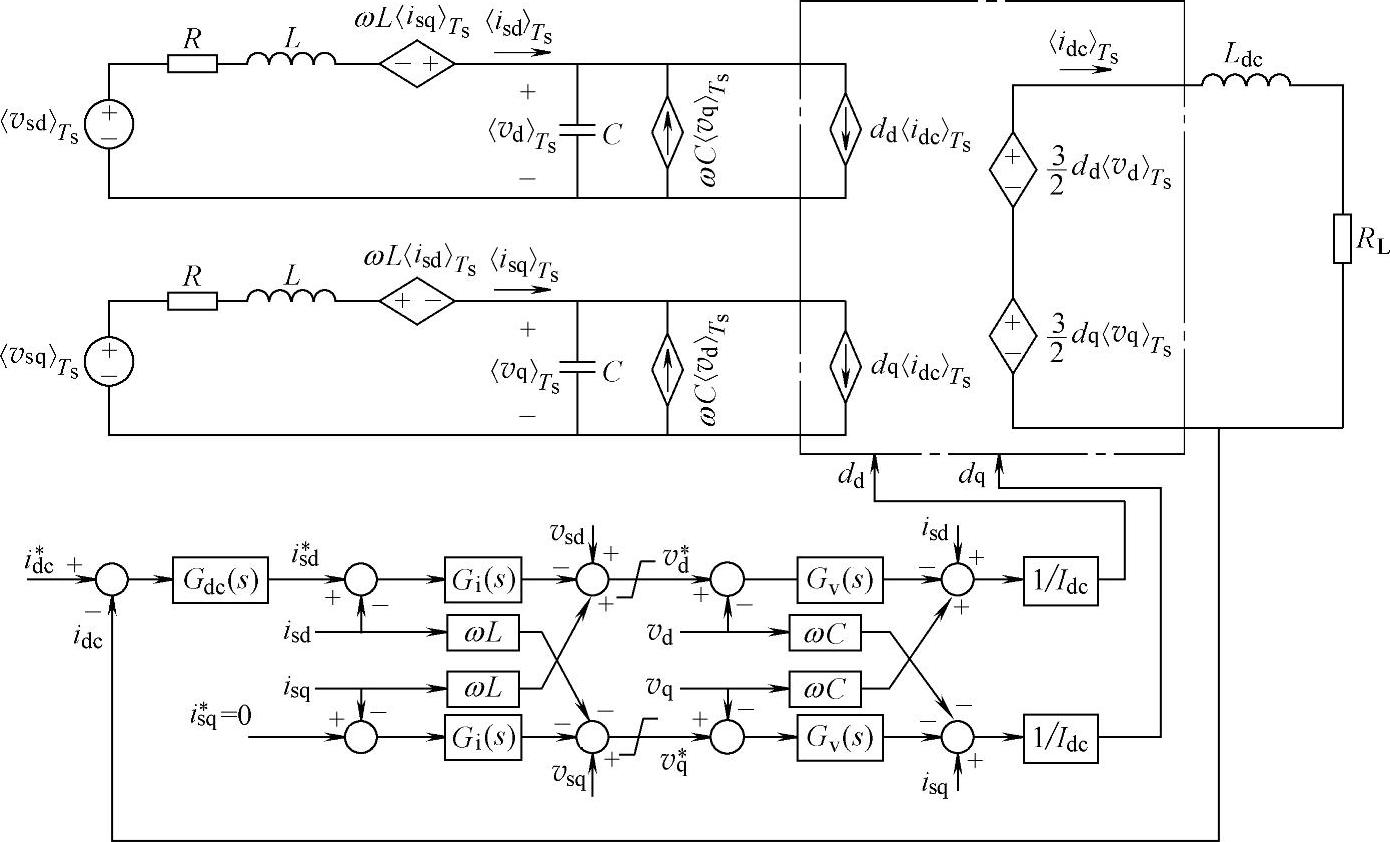
图6-26 电流型PWM整流器在dq坐标系下的控制系统

图6-27 直流电流环路控制框图
根据式(6-40),由于交流侧滤波电感通常较小,当忽略滤波电感的作用时,有功功率、无功功率与调制比的关系如下:

由式(6-74)可得到调制比M的计算公式为

同样,当忽略滤波电感的作用时,按式(6-39),可给出的有功功率和无功功率与相位角δ的关系如下:

整理式(6-76),得到

由式(6-77)可得到相位角与有功功率、无功功率的关系为(https://www.xing528.com)

从式(6-75)和式(6-78)可知,调制比和相位角依赖准确的功率控制指令,这就需要检测输入的功率,并引入适当的功率控制。根据赤木泰文提出的瞬时功率理论,可以得出瞬时功率检测方法。
在三相电路中,将三相电流和电压的瞬时值vsa、vsb、vsc和isa、isb、isc变换到两相静止αβ坐标系中,可以得到两相静止αβ坐标系下的瞬时电压vsα、vsβ和瞬时电流isα、isβ,即
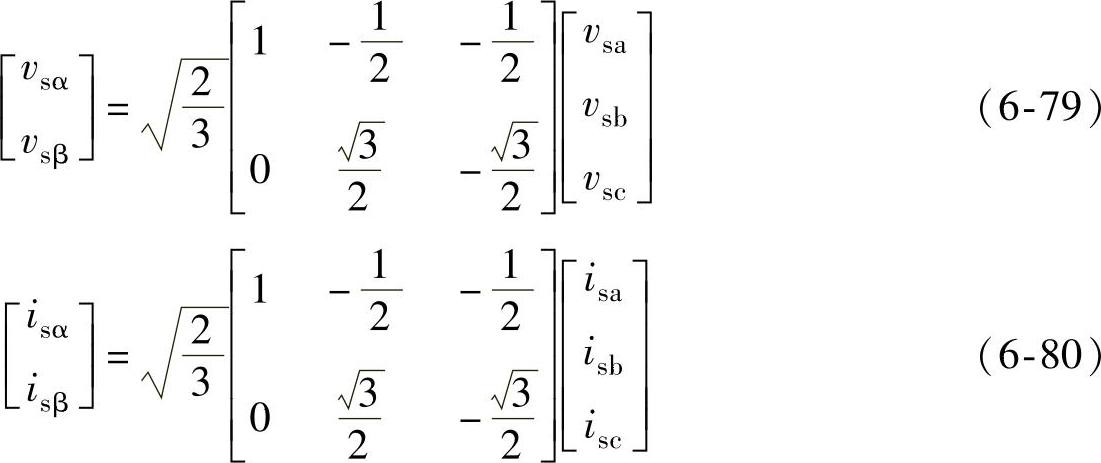
三相电路的瞬时有功功率p和瞬时无功功率q为

将式(6-79)和式(6-80)代入式(6-81),可得

p和q就是三相电路中的瞬时有功功率和瞬时无功功率。对三相平衡系统,也可表示为

基于调制比和相位角的电流型整流器闭环控制框图如图6-28所示,由直流电流外环、功率控制内环、调制比和相位角计算、瞬时功率检测等主要环节构成。直流电流环路控制器Gdc(s)和功率环路控制器GPQ(s)可采用PI控制器。直流电流外环用于调节负载输出的电流,其输出作为有功功率环的指令。为了消除计算调制比和相位角时所用到的功率信息可能存在的偏差,在功率控制中加入了PI闭环控制,对得到的功率指令进行调整。然后,根据所得到的精确功率控制指令,通过式(6-75)和式(6-78)的计算便可以得出SPWM控制所需要的调制比M和相位角δ,以此来控制电流型整流器的工作。
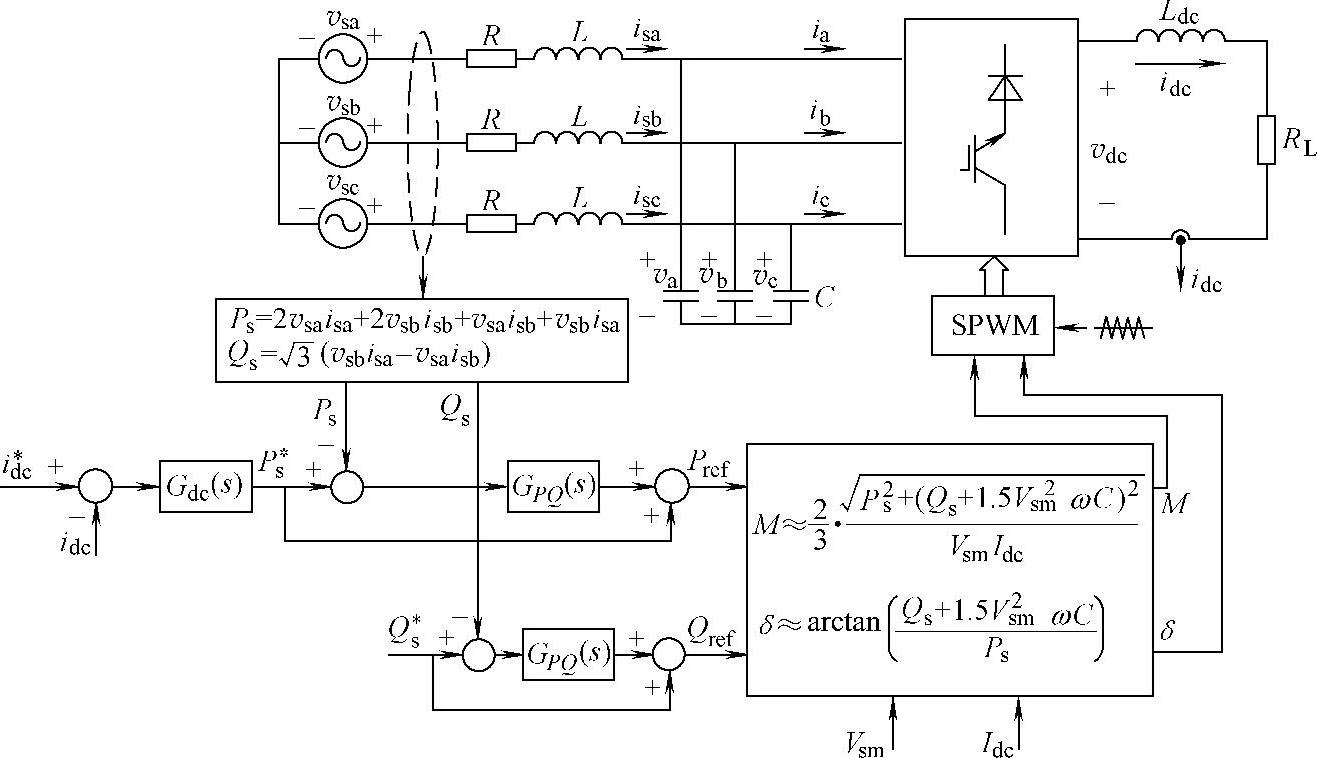
图6-28 基于调制比和相位角的电流型整流器功率闭环控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。