



为了充分测试稳控系统的可靠性,进行了稳控系统的冬季实验。冬季实验的主要目的:测试稳控系统各部件在低温环境下的工作情况;测试稳控系统在极低附着系数的制动效果,尤其是高速条件下的制动效果。冬季实验条件:温度为-20~-18℃,风力3~4级,路面上覆盖一层薄薄的雪沫,其附着系数极低,为0.15左右。以40km/h、60km/h、80km/h的初速度进行应急控制,观测车辆是否跑偏或者横摆,利用采集系统分析各车轮的运动情况。整个制动过程车辆直线行驶,无侧滑甩尾等。图6-28所示为稳控系统典型数据。
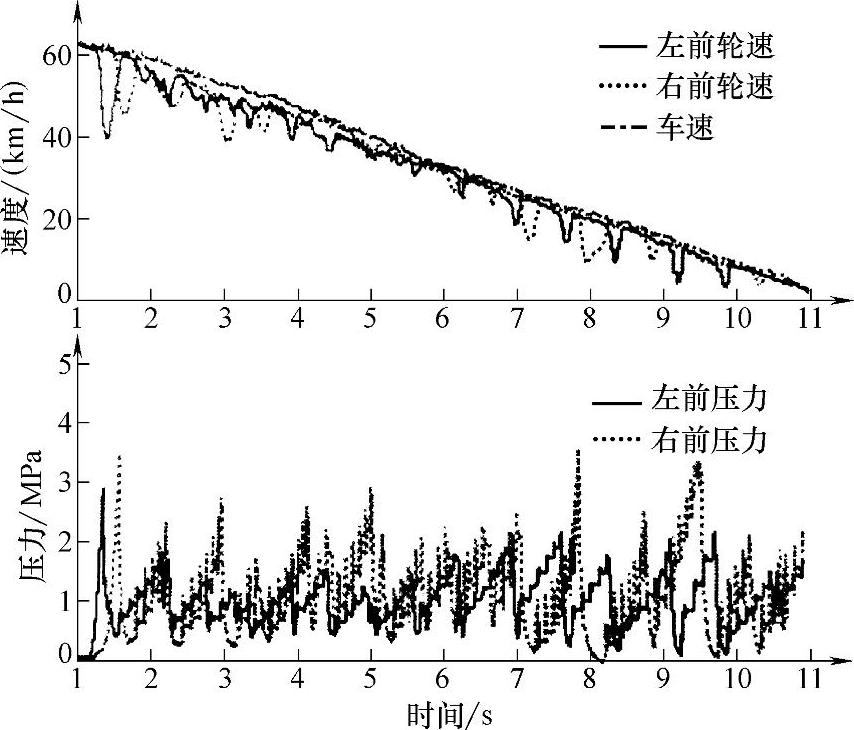
图6-28 冰面上的稳控系统典型数据
在冰面上进行了制动变线实验,稳控系统控制效果稳定,使滑移率保持在临界滑移率附近,可以获得较大的侧向附着系数,因此在冰面上制动调整方向时,路面可以提供足够的侧向力,保证车辆按照预定的轨道变线。在附着系数极低的冰面实验过程中,以不同的初速应急制动,车辆无抱死拖滑、失稳侧偏现象,满足稳控系统的可靠性要求。稳控系统处于较低温度下均能工作正常,验证了ECU、压力控制单元、稳控系统电动机和各传感器满足低温工况工作的要求。
在不同的实验路线条件下,根据不同的路径拟合方法有不同的目标路径。采用低阶曲线将有约束段的中心线平滑连接,构造连续光滑的目标路径。以双移线操作为例,该实验路径设置如图6-29所示,其中黑色圆点为桩桶位置。

图6-29 路径设置
1—行驶方向 2—车道偏移量 3—路宽 4—路段1 5—路段2 6—路段3 7—路段4 8—路段5 9—路段6
图6-29中各路段位置及偏移量见表6-8。
表6-8 ISO3888-1:1999路径尺寸(单位:m)
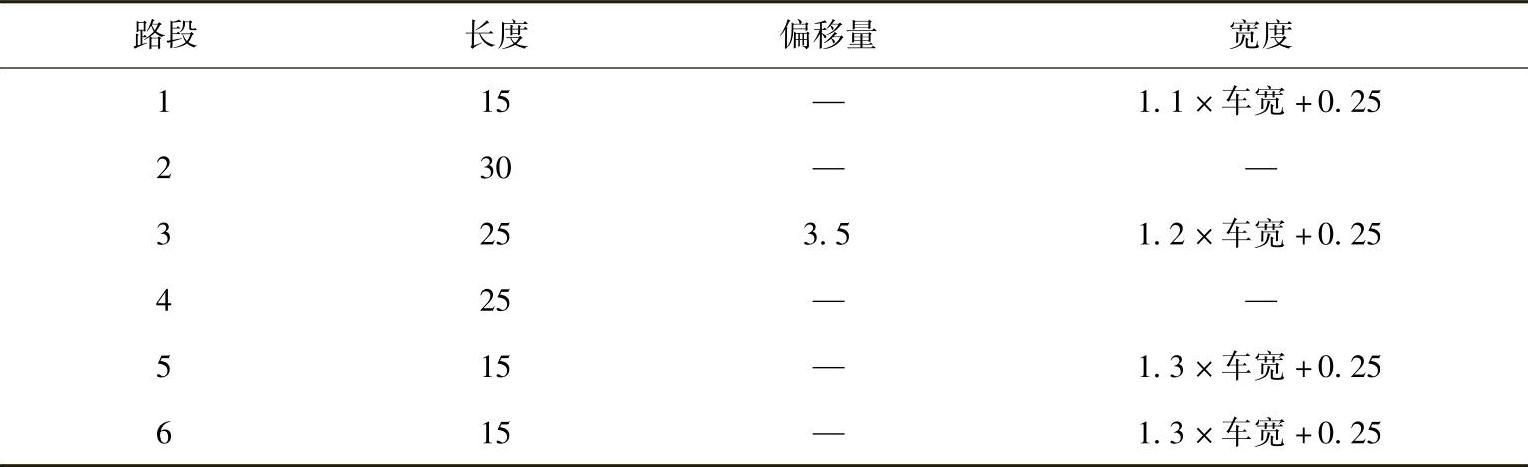
目标路径规划方法:有桩桶的路段(路段1、路段3、路段5、路段6),采用桩桶中心线,在其他两段(路段2、路段4),采用低阶曲线,保证曲线段和直线段接触位置的斜率相同、曲率相同。曲线段和直线段接触位置的曲率相同意味着全局曲率连续可导;曲率对应车辆横向加速度,如果完全跟随目标路径,则车辆横向加速度没有突变。如图6-30所示。该目标路径具有连续可导的曲率,黑色圆点是以质心为参考时的边界约束,以下为分析方便,均考虑以质心为参考的边界约束。道路宽度仅仅比车宽大很小的值,所以对车辆质心实际轨迹的约束是很严格的。
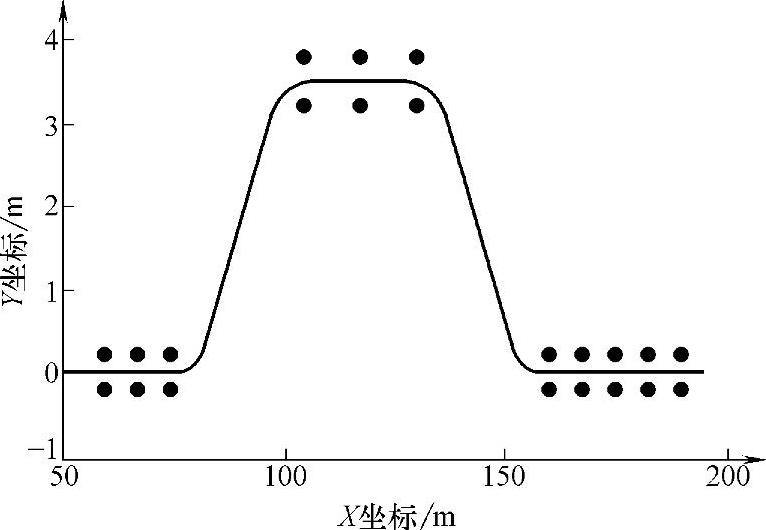
图6-30 目标路径
驾驶人模型中,如果车速较低,车辆横向运动没有进入非线性区间,固定时间驾驶人模型均可获得较好的轨迹跟随效果。通常增大时间,转向角调整幅度减小,车辆稳定性较好,但轨迹跟随精度降低;缩短时间,轨迹跟随精度提高,转向角调整幅度增大,车辆稳定性变差。当时间小到一定程度时,转向出现振荡,不能完成路径跟踪。当车辆运动在速度较高、轨迹复杂、有边界约束(道路宽度约束)的条件下,固定时间驾驶人模型往往难以完成驾驶任务。在有边界约束的条件下,速度高于一定值之后,难以求解到满足边界约束的驾驶人时间。如图6-31所示,当取固定时间T为0.5s时,跟随轨迹时出现振荡;当取固定时间T为0.8s时,边界约束段的出入口处出现超出边界的情况;当取固定时间T为1.2s时,大部分边界约束段都出现超出边界的现象。因此,在有边界约束的情况下,为了提高驾驶人模型的适应性,驾驶人模型需要采用自适应的时间。
假设驾驶人能感知车辆状态,具有预测车辆运动的能力,能够对控制进行优化处理[13]。在某一位置处,选取不同的时间Te,计算在时间t1内的运行轨迹和目标轨迹之间的偏差、边界的距离、时间t1结束时的车身横摆角和对应位置处目标轨迹的切线方向的偏差。根据这三者以及推算所采用的时间Te制定相应的优化函数,根据优化函数选择合适的时间,在时间t1内按照该时间进行转向控制。其中轨迹偏差的优化函数设计为
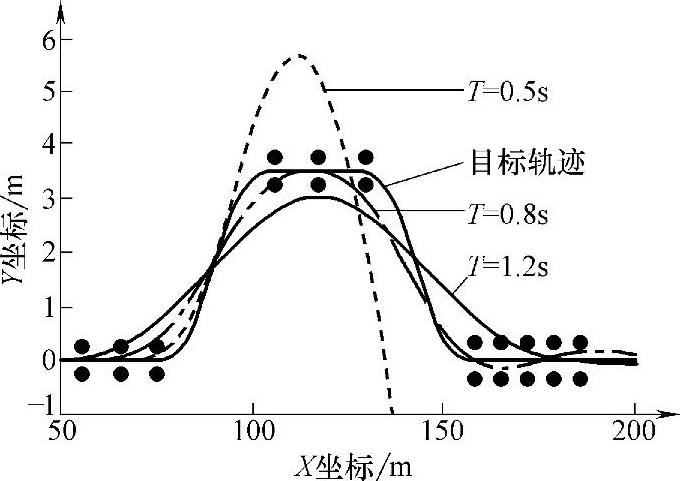
图6-31 固定不同时间下的仿真结果

式中 ytar——目标路径;
ye——预测轨迹。
t1——模型预测时间,根据道路特征,通过反复试算确定:对于全部轨迹边界约束的测试道路,取1~2s;对于局部边界约束的测试道路,将约束段和非约束段分离,t1对应一段道路。(https://www.xing528.com)
为了满足边界(路宽)约束,驾驶人模型需设计轨迹和边界位置之间距离的优化函数。其目的是通过该优化函数,将车辆约束在远离道路边界的位置,保证车辆安全通过。

式中g为表示安全性的轨迹和边界位置的距离的函数,车辆位置越靠近边界,g值越大,其表达式为

式中Δ为中心线到边界的距离,在非边界约束段,Δ→+∞。当|ytar-ye|>Δ时,g→+∞。
由于本次推算的结束时刻是下一阶段的开始时刻,如果下一阶段的开始时刻车辆方向和对应位置处的目标轨迹切线方向相差很大,无疑会使下一阶段的转向控制难度增加。为了减小下一阶段转向控制难度,需要建立t1时刻车身横摆角和对应位置处目标轨迹的切线方向的偏差的优化函数:

式中φt1v表示t1时刻车身横摆角,φt1r表示t1时刻车辆所在位置处目标轨迹的切向方向和x轴的夹角。
时间和整车转向运动的动态响应时间特性相关,因此可以采用时间和整车转向运动响应相关的时间的差值作为优化函数:

式中Te为进行推算时所采用的时间,N为与车辆转向响应特性相关的时间。速度高时N可以取到1s或更短,速度低时则适当增大。定义综合优化指标为

式中W1,W2,W3,W4为权系数,不同的选取方式对应不同的驾驶风格。比如增大W1的取值,意味着更注重轨迹跟随的位置精度;增大W2的取值,表示更注重轨迹远离边界;增大W3的取值,意味着更注重下一阶段的可控性;而增大W4的取值,意味着更注重取较接近的时间。通过迭代优化,可以得到合适的时间T。自适应的时间的算法如图6-32所示。
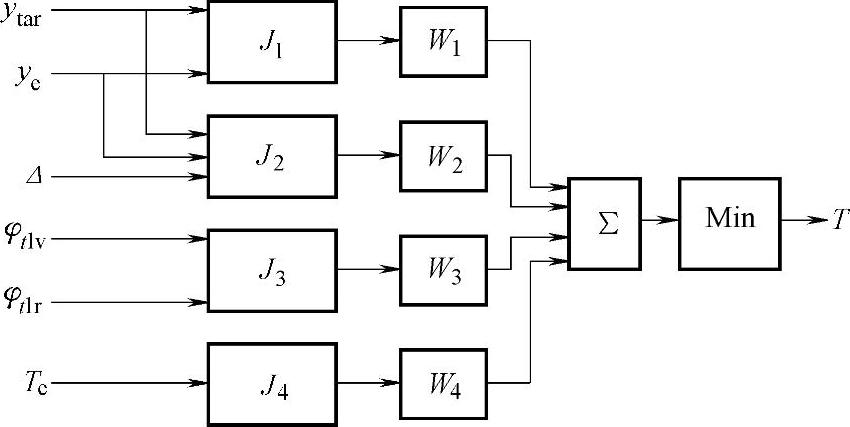
图6-32 自适应时间确定逻辑框架
如在x=50,y=0位置,采用不同的时间得到的结果如图6-33所示。根据优化指标J,最终选取的时间为0.5s。图6-34所示为120km/h速度下的仿真结果,采用固定时间T=0.6s时,在120~130m位置大幅度超出边界,采用固定时间T=0.7s时,在75m位置超出边界,且130m位置附近超出边界。采用自适应的时间之后,没有超出边界情况。

图6-33 不同时间对应运行轨迹
在速度较低时,车辆保持稳定,自适应时间的最优预瞄驾驶人模型虽然比固定时间模型有一定优势,但是差别不是特别明显;随着车速增加(6~20km/h),车辆接近极限工况,自适应时间的驾驶人模型体现出明显优势,在固定时间的最优预瞄驾驶人模型完全不能满足驾驶任务时,自适应时间的驾驶人模型能够完成驾驶任务。
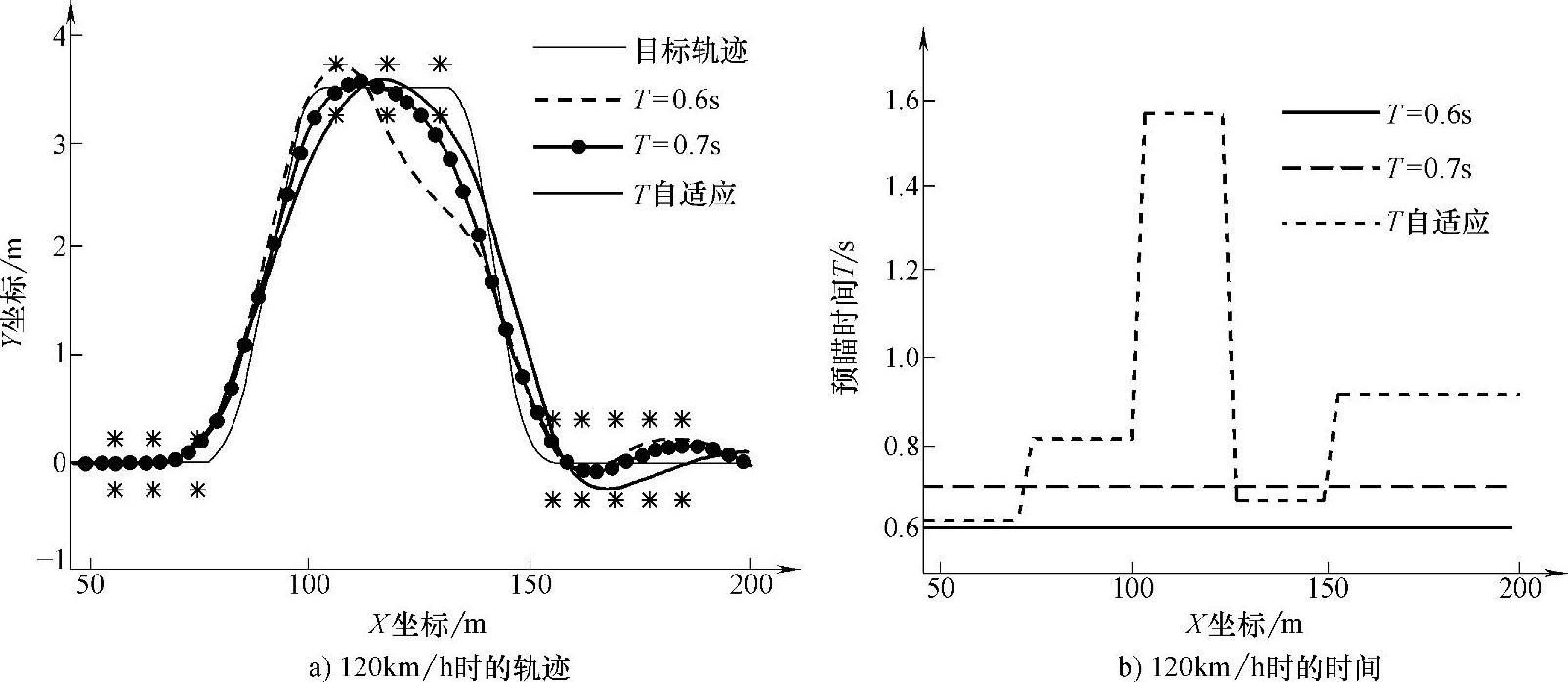
图6-34 120km/h高附双移线仿真曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。