



1.太阳能自动跟踪系统驱动部件的设计与理论依据
图20-3给出电动机三维图,其选用的电动机功率如下:
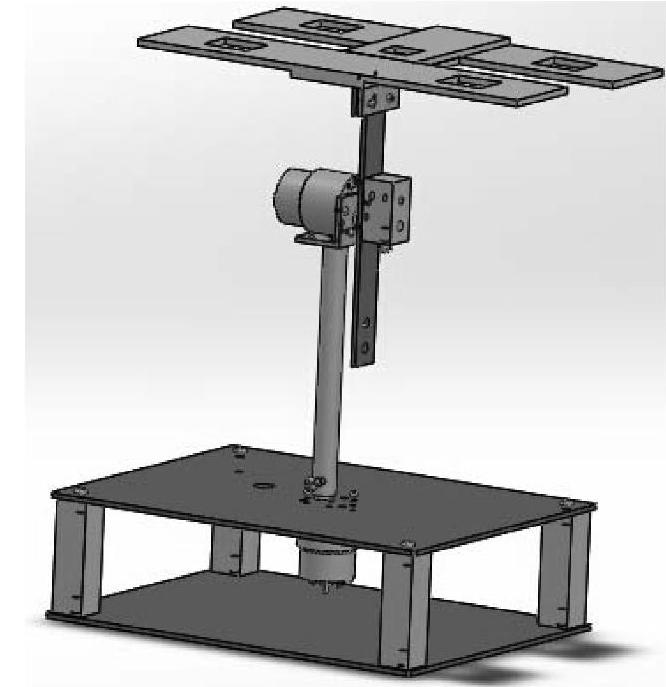
图20-2 总体结构图
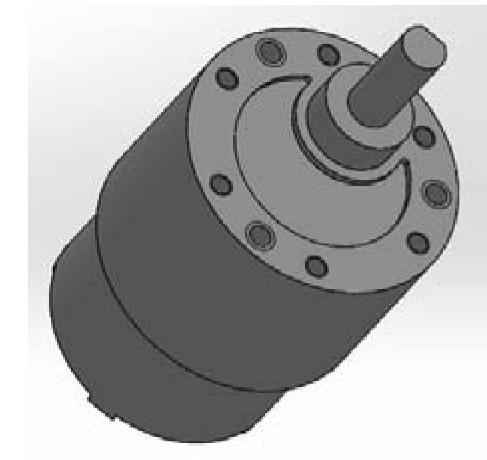
图20-3 电动机三维图
实际功率:P=Fv=6N×60m/s=0.36kW
安全功率:P=Fv/η=0.36kW/0.8=0.45kW
2.太阳能自动跟踪系统传动部件的设计与理论依据
为实现整体框架结构的支撑与线路封装,特设计系统底座,如图20-4所示。
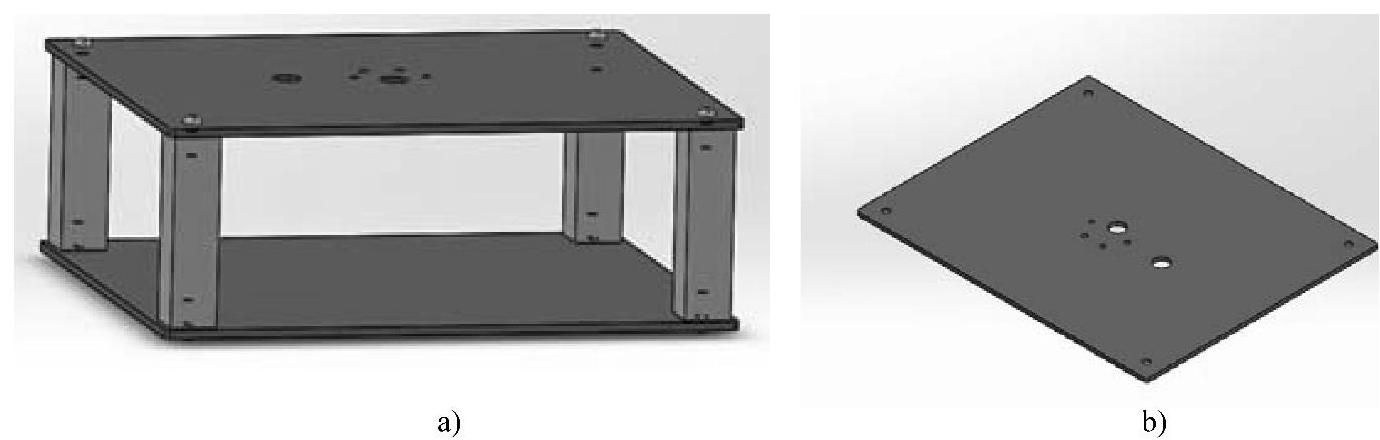
图20-4 系统底座
a)底座示意图 b)底座上板面
为使太阳能板能朝向太阳光最强方向,所设计的太阳能自动跟踪系统必须具备至少两个转动自由度。因此,本太阳光自动跟踪系统采用双轴结构(分别为绕铅垂轴转动自由度和绕水平轴转动自由度),上述两个轴线方向自由度分别由两个电动机实现。铅垂方向转动自由度由一台电动机实现转动,该电动机通过螺栓及电动机座连接在底座上,其中电动机座具体结构如图20-5所示,此电动机座为采购件,为满足实际安装需求,在图示位置钻有ϕ6.5mm的通孔(与其连接的螺栓直径为6mm),用以通过该孔利用螺栓固定在立柱上。
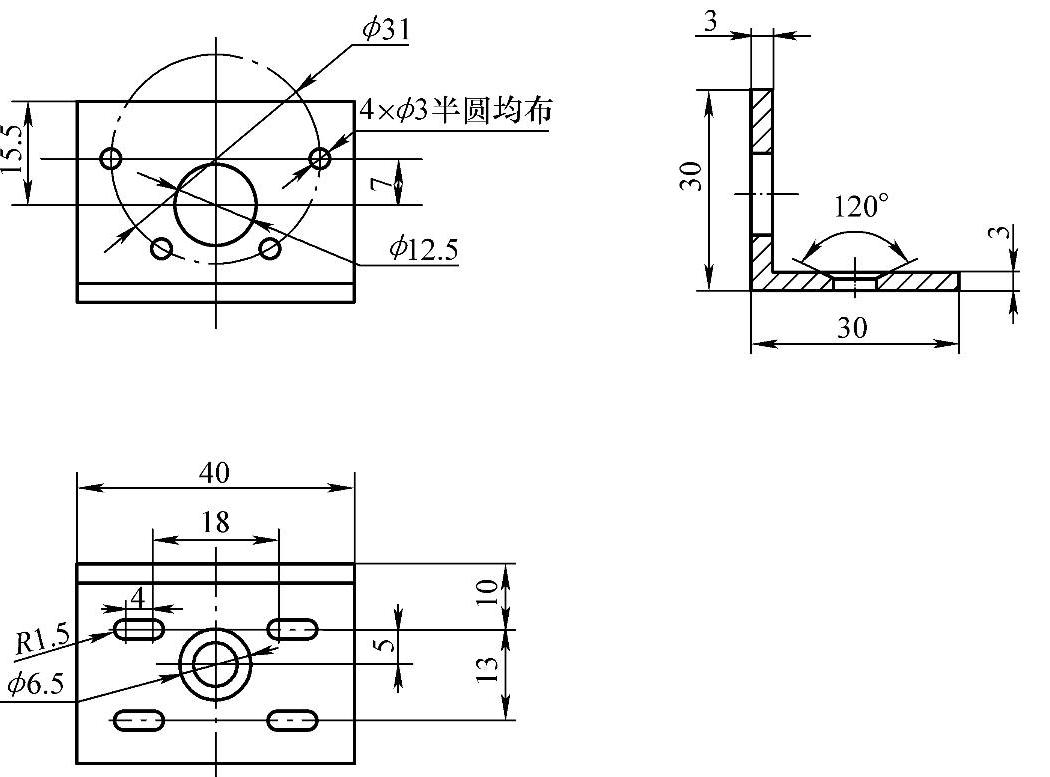
图20-5 电动机座设计图
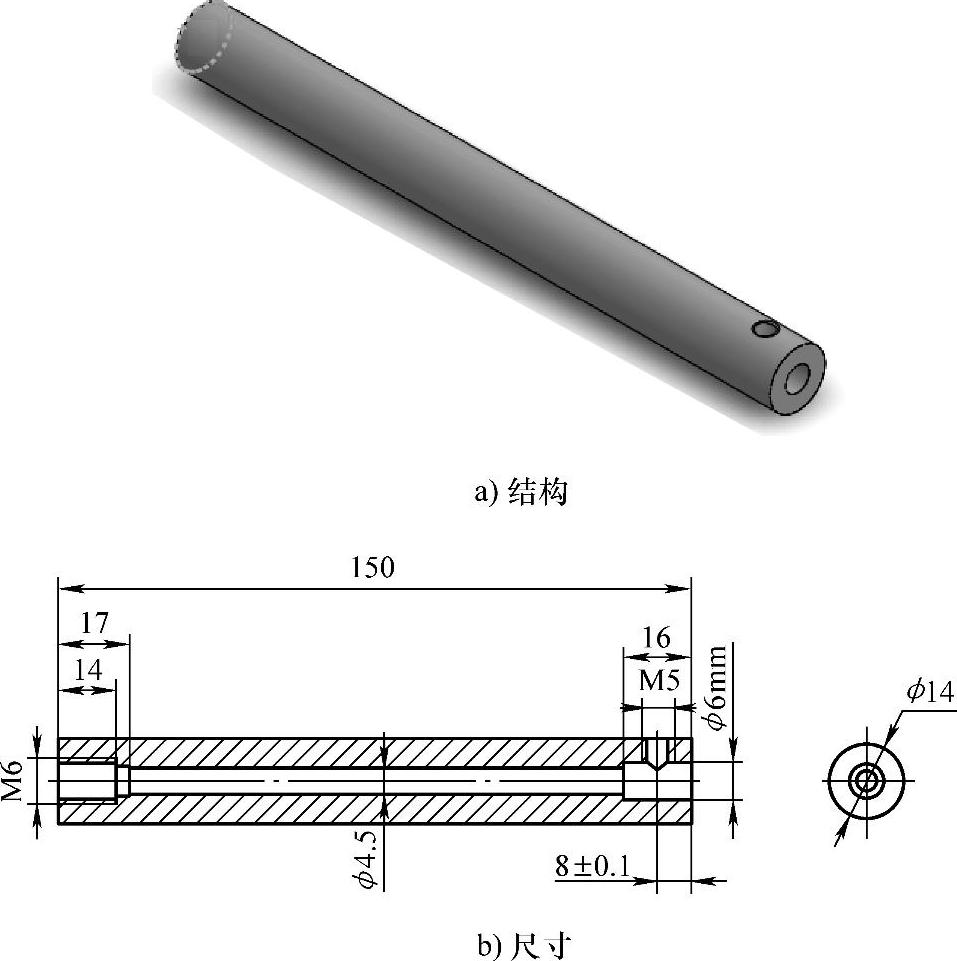
电动机输出轴结构及尺寸如图20-6所示,该电动机输出端,即电动机输出轴上装有一根与电动机固定连接的圆柱形立柱。该立柱根据功能及装配需要在其一端加工出一个M6的螺纹孔,其另一端钻一个直径6mm的光孔,上述两孔的长度分别由M6的螺栓的螺纹长度和电动机输出轴的长度确定并在光孔处距端面8±0.1mm的地方加工出一个M5的螺纹孔。
 (https://www.xing528.com)
(https://www.xing528.com)
图20-6 电动机输出轴
联轴器上两个孔的位置根据安装需求设定,其具体位置如图20-7所示,为满足安装需求,特设计总长度为37mm。电池板下支架左部的4个孔的位置是根据电池板支架连接块上的4个圆孔的位置对应设计,并利用台钻打孔。为方便安装定位,上述孔的左右各留2mm的余量,中间的两孔中的一个与M5mm的螺栓连接,另一个用于连接与电动机输出轴上,此外,图示右边的两孔用于连接配重块,以平衡连接到电动机上后的力臂。
下支架总长度设计依据 L=(30+50+15+85)mm=180mm
上式中的30mm为连接块宽度,50mm为上电动机与太阳电池板的距离、15mm为联轴器上两孔间距,85mm为配重块安装位置。
最后,在此连接架上用胶水将两块太阳能固定板连接起来组成太阳能板连接架,太阳能板连接架具体结构及尺寸如图20-9所示,其中左、右两端安装太阳能板,太阳能板相关连接线通过图示左右两端开孔处穿出,其尺寸根据光敏电阻板下部导线分布的宽度确定。该零件的材料为有机玻璃。太阳能板支架如图20-10所示。
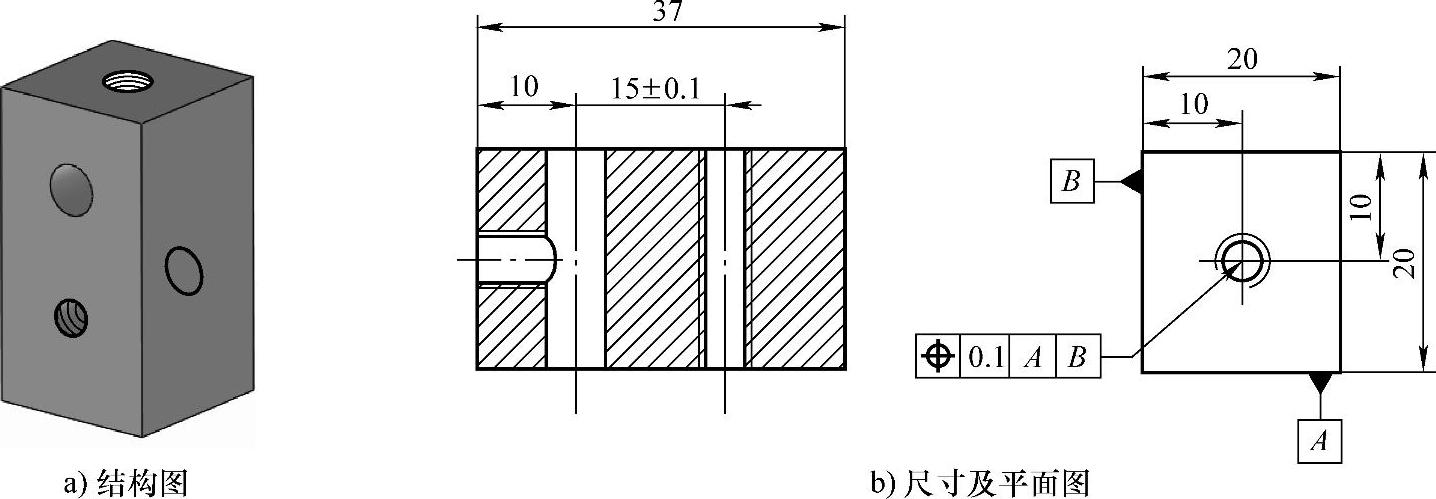
图20-7 联轴器
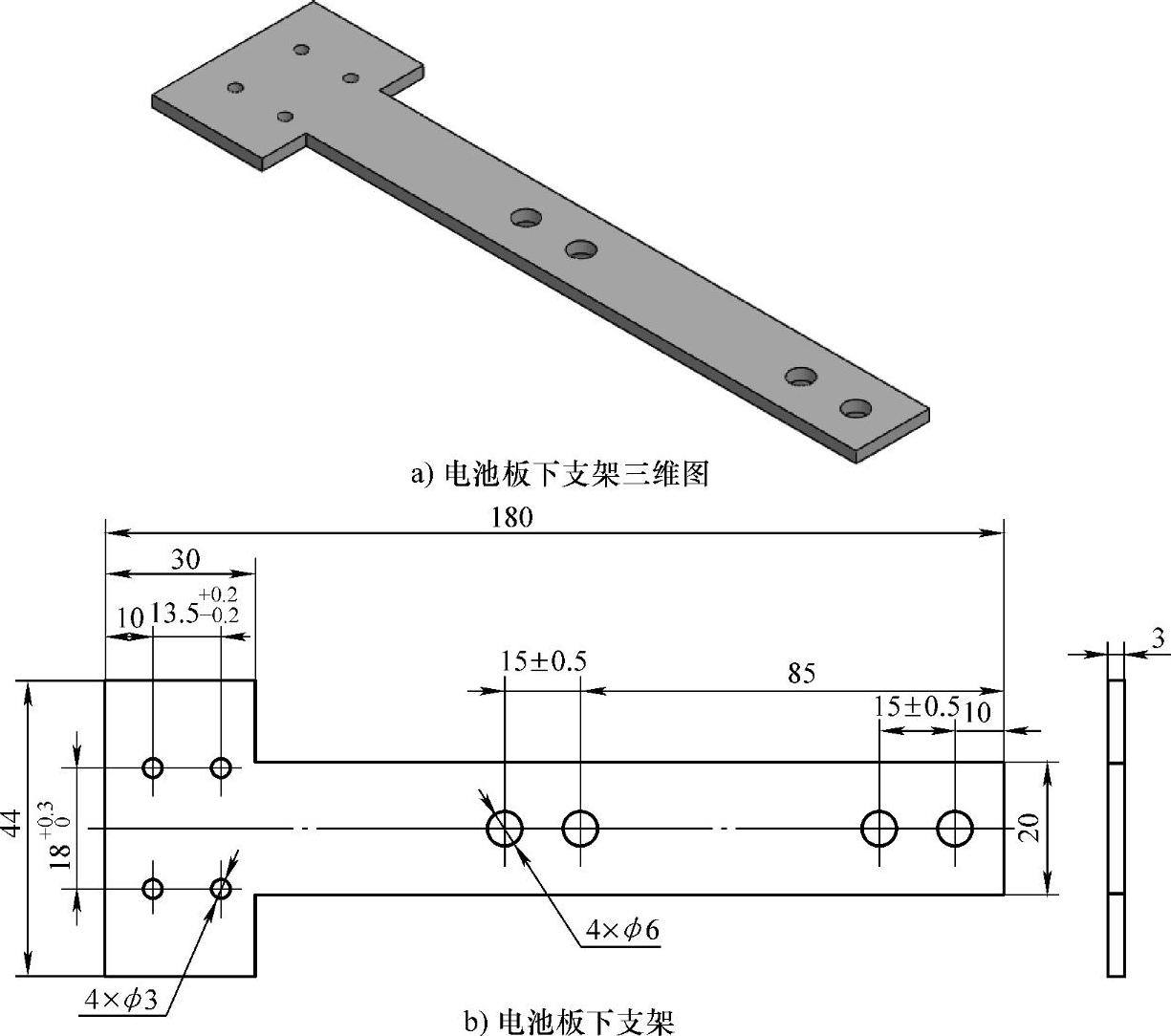
图20-8 电池板
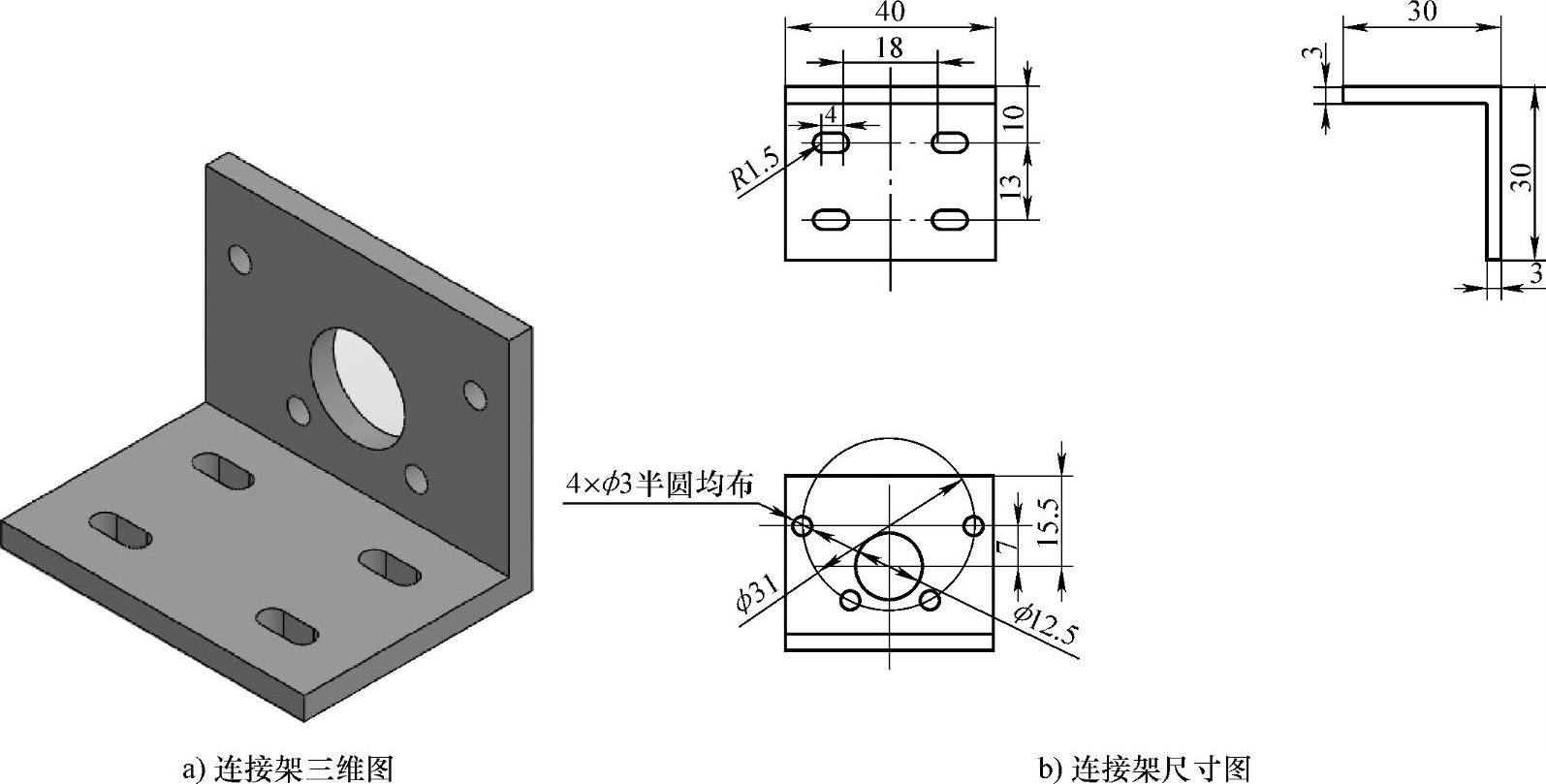
图20-9 太阳能板连接架
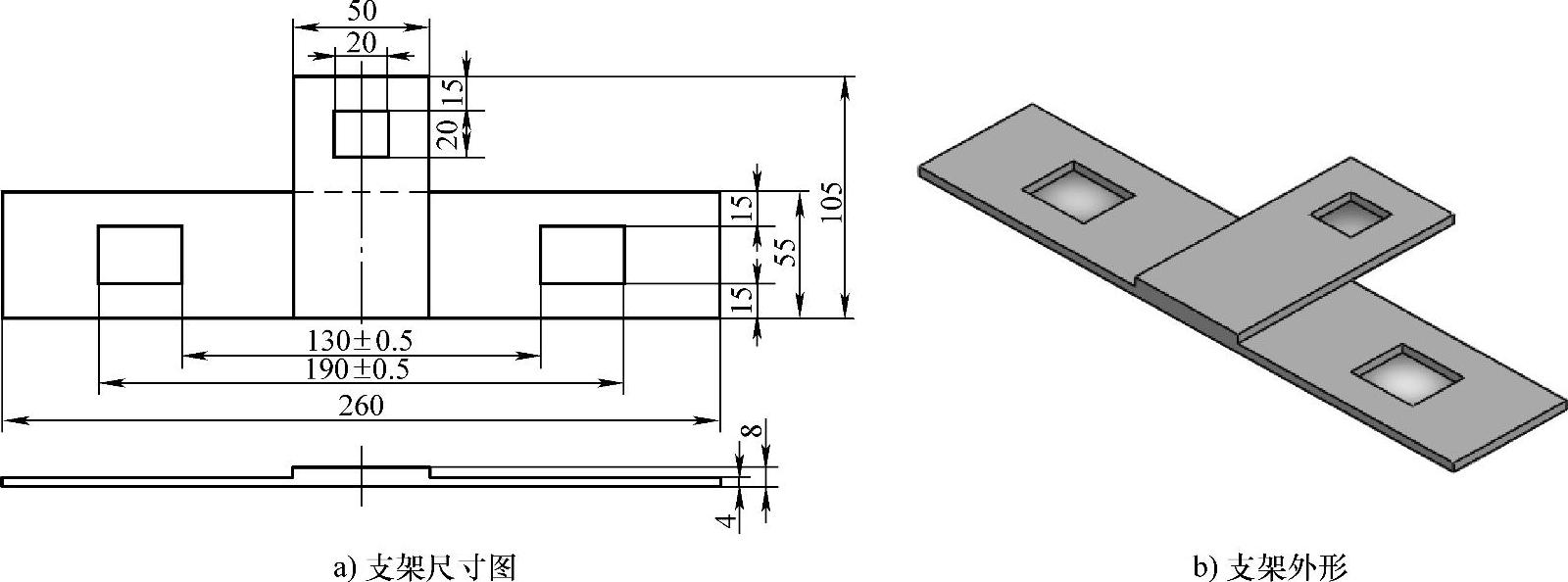
图20-10 太阳能板支架
3.太阳能自动跟踪系统执行部件的设计与理论依据
该系统通过太阳电池板给蓄电池充电,所获电能一部分用于跟踪太阳所需的能量,另一部分储存于蓄电池中,必要时供给其他用电器使用。本次所设计的系统主要用于植物的灌溉,故特意选用5V的直流水泵。水泵的参数见表20-1。
表20-1 水泵性能参数

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。