



ESC系统应用了先进的传感器技术、执行器技术、车载网络技术和现代控制技术。图1-28展示了博世ESC系统的主要组成部分。为了识别驾驶人对汽车的期望,并感知汽车的实际运动状态,ESC系统需要安装4个轮速传感器来测量4个车轮的转速,一个转向盘转角传感器来测量转向盘转角以及角速度,汽车横摆角速度传感器、横向加速度传感器来判断汽车的实际运动状态,制动主缸的液压传感器来识别驾驶人是否在进行制动操纵。
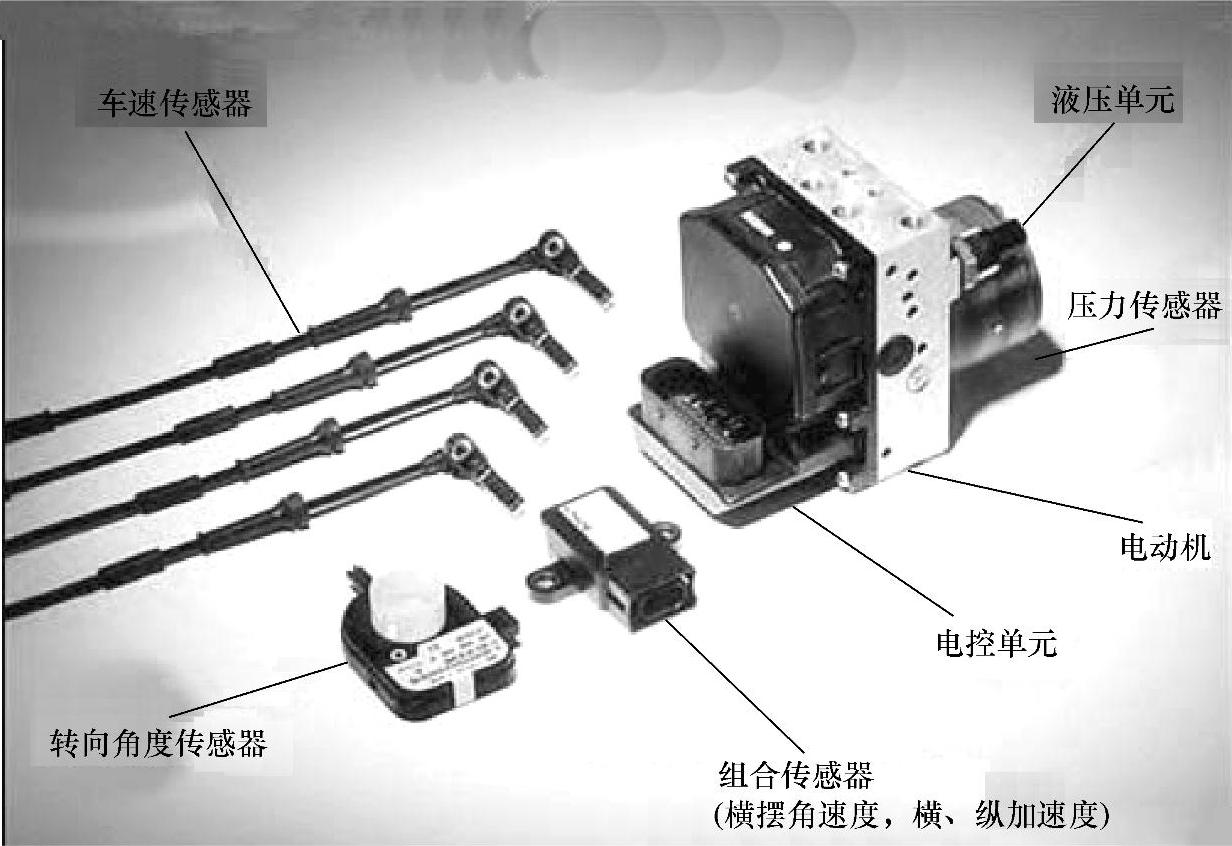
图1-28 博世ESC系统的主要组成部分
为了对汽车的运动进行有效的干预,ESC系统使用两套不同的执行机构,即发动机输出转矩调节和轮缸制动力控制。
为了实现发动机输出转矩调节,ESC系统的控制单元和发动机的电子管理系统通过数字网络联在一起,前者将期望输出转矩传到发动机的电子管理系统,由该系统对节气门开度和点火时间进行相应的调节来控制发动机的实际输出转矩,如图1-29所示。
对于ESC来说,汽车是控制对象。ESC系统不仅仅只是为了获得所需要的侧向力和纵向力而控制车轮的滑移率在一定范围内波动,而且要控制汽车运动尽可能接近理想的线性运动特性,并与路面环境相适应。这是它与ABS和TCS功能上的区别。
1.传感器
(1)轮速传感器
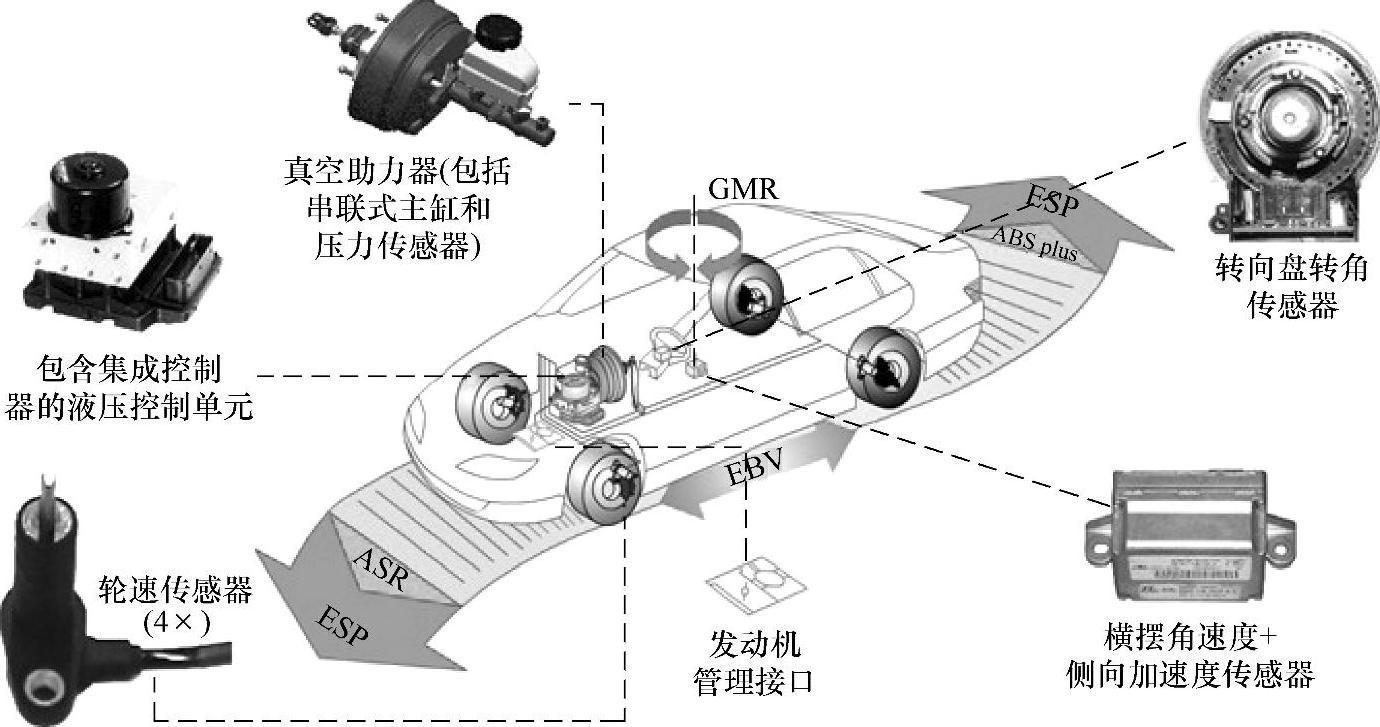
图1-29 ESC总成的整车布局图
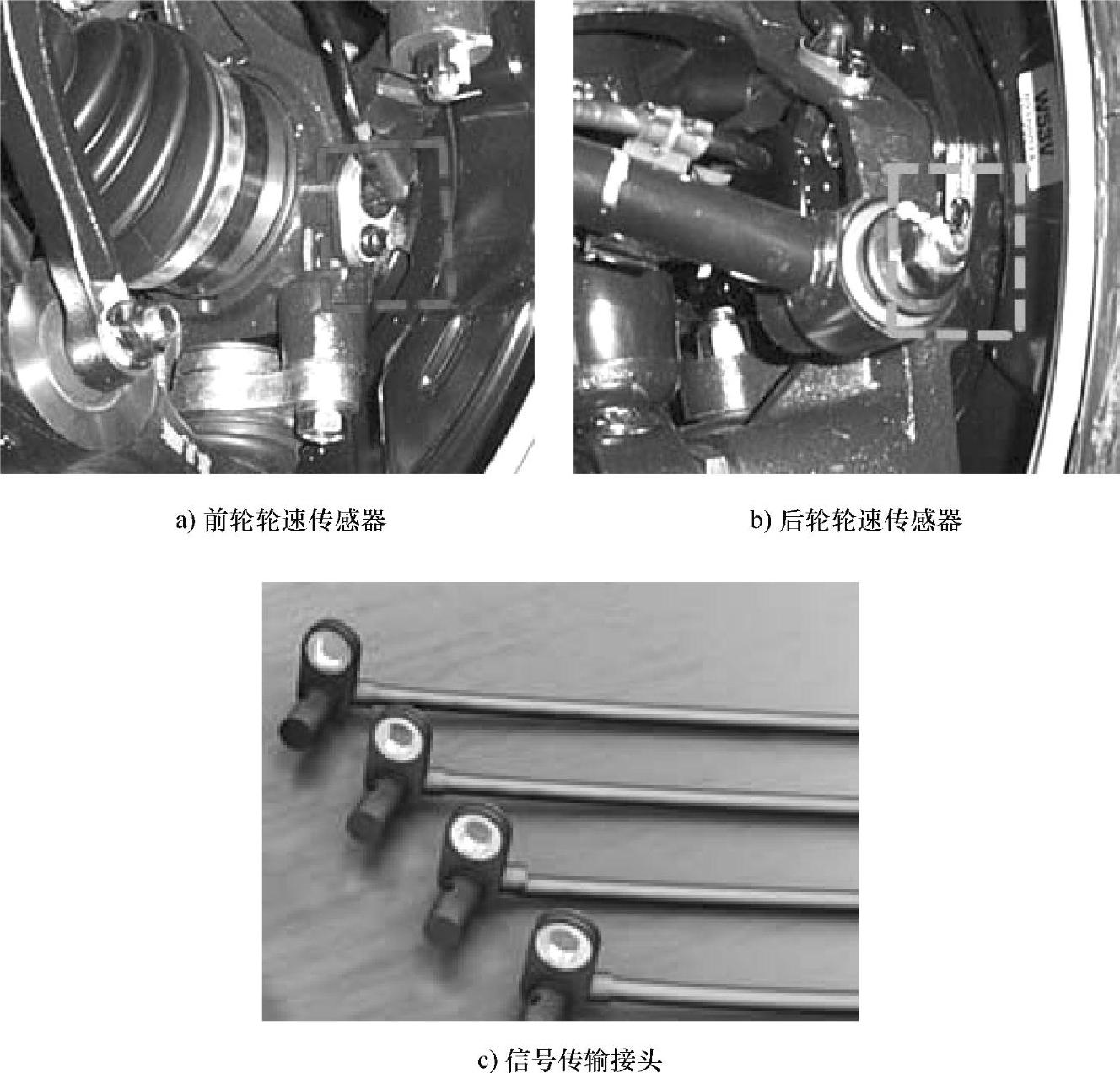
图1-30 车轮轮速传感器
如图1-30所示,轮速传感器用于检测车轮旋转速度信号。目前常用的轮速传感器有电磁感应式、霍尔式和磁阻效应式轮速传感器三种。
在汽车上检测轮速信号时,最常用的传感器是电磁感应式传感器,其结构原理图如图1-31所示,通常做法是将传感器安装在车轮总成的非旋转部分(如转向节或轴头)上,与随车轮一起转动的由导磁材料制成的齿圈相对。当齿圈相对传感器转动时,由于磁阻的变化,在传感器上激励出交变电压信号,这种交变电压的频率与车轮转速成正比,ECU采用专门的信号处理电路将传感器的变量信号转换为同频率的方波,再通过测量方波的频率或周期来计算车轮转速。
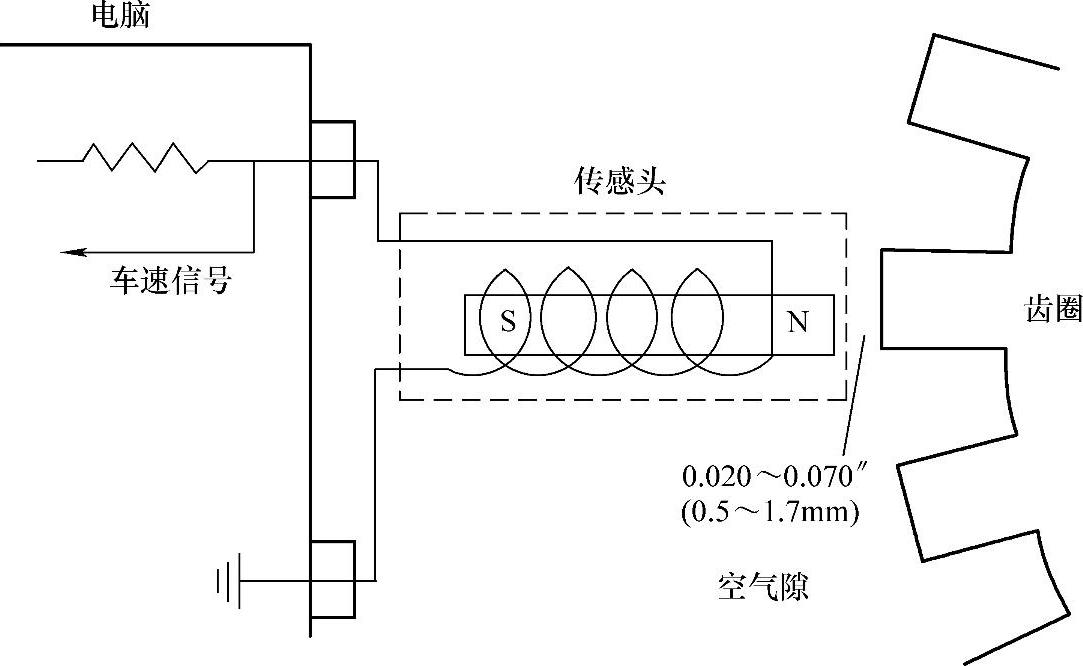
图1-31 电磁感应式轮速传感器
霍尔效应轮速传感器:当电流流过一个处于磁场的导体时,若磁场方向垂直于电流流向,则导体在垂直于磁场和电流流向的方向上发生偏转。霍尔效应原理如图1-32所示,若有一磁场B垂直于传感器(霍尔元件),电流I在传感器端子1和端子2流过,将在端子3和端子4产生一个霍尔电压VH(电位差)。这个电压是由磁场的强度和电流流量决定的。霍尔效应元件材料由铟、砷化镓或硅制成,其性能比较见表1-2所示。
表1-2 霍尔元件材料特性对比

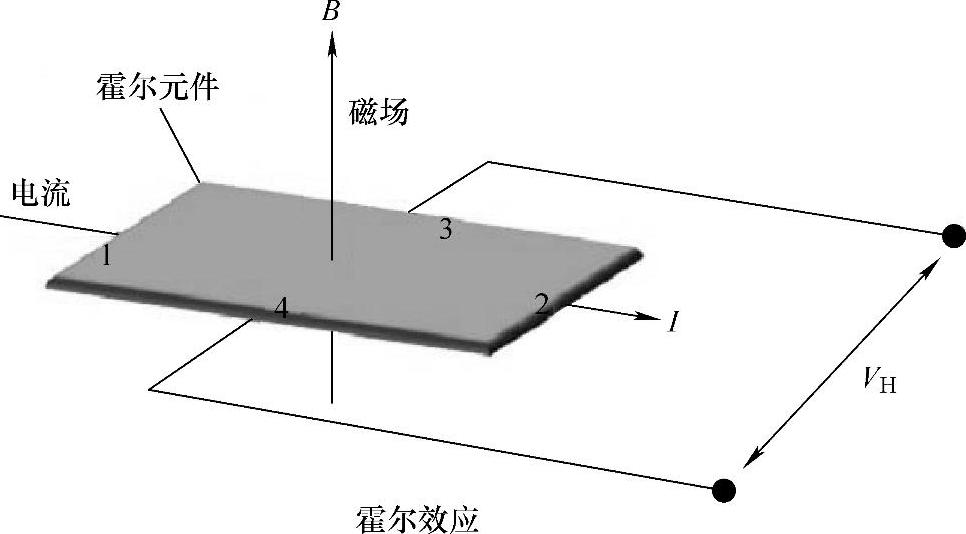
图1-32 霍尔效应
磁阻效应(MRE)式轮速传感器:载流铁磁材料在外部磁场作用下自身电阻发生变化的现象称为磁阻效应。例如,铁磁元件在磁场中旋转90°,其电阻将改变2%~3%。当电流与磁场方向一致时,电阻值达到最大,当两方向垂直时电阻值最小,这一关系即为著名的各向异性磁电阻效应(AMR)。这种方法被越来越多应用到新型传感器上,其中性能较好的是巨磁电阻(GMR)传感器。GMR传感器与其他磁阻传感器相比,成本低且有较好的温度特性。当GMR传感器在磁场中旋转90°时,电阻变化范围高达20%。
MRE(磁阻效应)传感器静态时有输入信号,因此适合零速传感器。MRE传感器的输出频率也与速度成正比,便于将信号输入MCU。为了获得更高的灵敏度并降低温度影响,通常将这种传感器配置成桥式电路结构。
电磁感应式轮速传感器的低速响应比较差,而霍尔传感器有较好的低速响应特性。与霍尔传感器相比,MRE传感器灵敏度高、工作温度范围大。
(2)转向盘转角传感器
ESC通过计算转向盘转角的大小和转角变化速率来识别驾驶人的操作意图。转向盘转角传感器用以测量转向盘的转角,ESC将转向盘转角转换为一个可以代表驾驶人期望的行驶方向的信号。
转向盘转角传感器按照其输出信号和应用方式,可以分为绝对位置转角传感器和相对位置转角传感器。绝对位置转角传感器输出转向盘的绝对转动角度,但这种传感器对于安装有一定的要求,同时造价昂贵,信号处理电路较复杂,在实际中使用不多。
传统的绝对位置转角传感器基于电阻分压原理,通常使用导电塑料作为电阻器来分压。在电阻器的两端施加一个直流电压,一个滑动接触点随着转向盘的转动在电阻器两端内运动,转向盘转动到两个端点位置时,滑动接触点刚好运动到电阻器两端。测量接触点和电阻器一端的电压即可求得转向盘的绝对转角位置。
相对值转角传感器包括光电感应式传感器,电磁感应式传感器以及纯粹的由电路元件组成的传感器,如图1-33所示。光电感应式传感器包括至少2个光敏元件、1个透光胶片以及对应的信号处理电路。透光胶片指的是在不透光的基片(通常做成圆环形)上均匀分布着一些透光矩形孔的胶片。透光胶片一般固定在转向管柱上,可以随着转向盘的转动而转动。在透光胶片的转动过程中,光线通过矩形孔入射在透光胶片后面固定的光敏元件表面。光敏元件表面的光强可以通过转换电路转换成不同幅值的输出电压。由于矩形孔均匀分布,因此输出的电压呈现方波形状。通过合理的设计,让两个光敏元件输出的两路电压存在一定相位差(通常为90°),通过比较两路信号的相位关系就可以判断转向盘的转动方向。
转向盘转动一周,输出的方波信号数就是矩形孔的个数,因此,每个方波周期对应的转向盘转角可以求出。在两个时刻t1和t2之间,知道了转向盘的转动方向以及方波的个数,就可以知道两个时刻之间转向盘转动的相对角度。因此,这种传感器被称为相对值转角传感器。通过一定的算法判断出转向盘的中间位置,再由相对值转角传感器求出相对于中间位置转动的角度,就可以求出转向盘的绝对转动角度。
磁感应式传感器利用永磁体和电子线路来产生方波信号,使用的原理包括霍尔效应、磁阻效应以及可变磁阻效应。这种传感器需要各种电子线路将传感器原始信号转换为适合应用的信号形式。由于这种传感器内部有比较多的电子部件,因此它们对于温度比较敏感,最高工作温度一般不超过125°。同时,由于永磁体的存在,外部磁场可能对于这种传感器造成影响(具体原理见2.2小节“ABS的组成”)。
(3)横向加速度传感器

图1-33 转向盘转角传感器

图1-34 横/纵向加速度传感器
如图1-34所示,ESC中的加速度传感器分为沿汽车前进方向的纵向加速度传感器和垂直于前进方向的横向加速度传感器,二者基本原理相同,只是成90°夹角安装。加速度传感器有很多种,有利用压电原理进行加速度的测量的,还有利用电容原理对加速度进行测量的(详见组合式传感器的相关内容)。下面对一种新型的微机械式加速度传感器原理进行简要介绍。
ESC一般使用微机械式加速度传感器,即在传感器内部,一小片致密元件连接在一个可以移动的悬臂上,可以反映出汽车的纵向/横向加速度的大小,其输出在静态时为2.5V左右,正的加速度对应正的电压变化,负的加速度对应负的电压变化,每1.0~1.4V对应1g的加速度变化,具体参数因传感器不同而有所不同。
横向加速度传感器的结构和原理:
横向加速度传感器的结构可以简化为由一块永久磁铁、一个弹簧、一个阻尼盘和一个霍尔传感器组成。永久磁铁、弹簧及阻尼器构成了一个磁力系统。该磁铁与弹簧牢固地连接在一起,并可在阻尼盘上方左右摇动,如图1-35a所示。
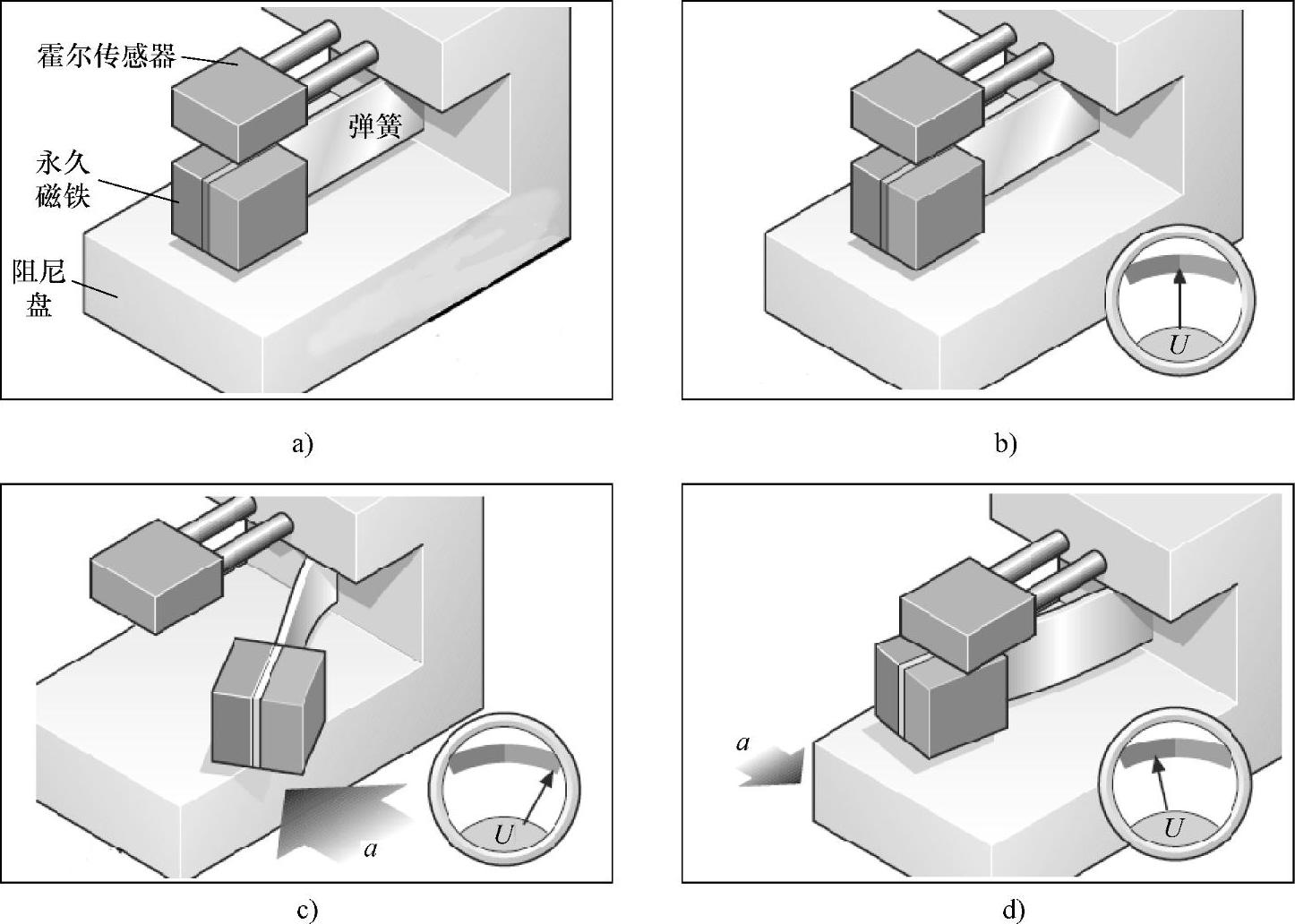
图1-35 横向加速度传感器结构示意图
当横向加速度a作用在车上时,永久磁铁也会有相应运动,但由于惯性,这个运动要稍迟发生,如图1-35b所示。也就是说,阻尼盘与传感器壳体及整车一同偏离永久磁铁(该磁铁先前处于静止状态)。
这个运动会在阻尼盘内产生电涡流,而电涡流又会产生一个与永久磁铁磁场极性相反的磁场。因此,总磁场的强度就被削弱了。这会使霍尔传感器的电压改变,电压的变化是与横向加速度的大小成比例的,如图1-35c所示。也就是说,阻尼器与磁铁之间的运动幅度越大,那么磁场强度被削弱得越大,霍尔传感器电压变化就越明显,如图1-35d所示。如果没有横向加速度,那么霍尔传感器电压保持恒定。(https://www.xing528.com)
(4)横摆角速度传感器
横摆角速度传感器(图1-36)检测汽车沿垂直轴的旋转运动,该旋转运动的大小代表汽车转向的激烈程度。横摆角速度传感器是根据陀螺原理进行测量的,一般采用微机械系统结构。当汽车绕垂直方向轴线旋转时,传感器内的微音叉的振动平面发生变化,在传感器内部采用压电元件产生振动,通过测量振动系统的科氏力来求解汽车的横摆角速度。这种测量横摆角速度的原理来源于航天技术。
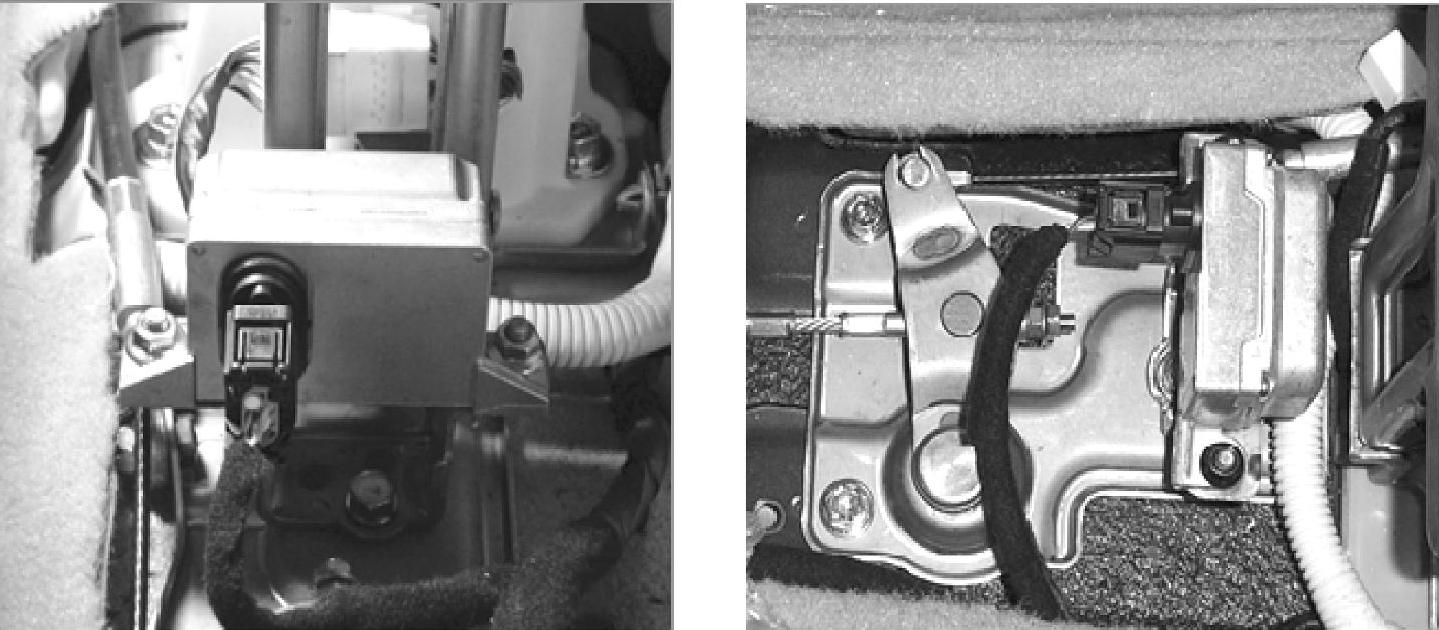
图1-36 横摆角速度传感器实物图
横摆角速度传感器的基本组件如图1-37所示。它是一个小的金属空心筒1,其上有八个压电元件2,其中四个使空心筒处于谐振状态,另四个用来监控作用在圆筒上振荡波节a是否改变。如果空心圆筒上作用有转矩,振荡波节的位置就会改变。振荡波节会移动b,起监控作用的压电元件会测量到这个改变并通知控制单元,控制单元就可以据此计算出横摆角速度。
(5)组合传感器
最初的ESC系统中纵向/横向加速度传感器和横摆角速度传感器都是单独实现的,随着以硅原料为基础的微机械测量系统的发展,出现了能同时测量横、纵向加速度和横摆角速度的传感器元件。现在的传感器总成(Sensor Cluster)模式,通常是将测量这3个参数的传感器设计为一体,并通过CAN总线与ECU通信。
微机电传感器的优点为安装尺寸小;传感器彼此可以精确调整,调整后就无法改变;结构更牢靠:部件都装在一个印制电路板上,按微机原理工作。通过一个6脚插头连接。按电容原理对横向加速度进行测量。横摆角速度是通过测量科氏力而获得的。
横向加速度传感器只是组合传感器印制电路板上的一个极小的部件。如图1-38所示,我们可以这样简略地描述其结构:放好质量可动的电容器片,使它可以来回摆动。两个固定安装的电容器片围住可动的电容器片,这样就形成了两个串联电容器K1和K2。借助电极就可以测量出这两个电容器容纳的电荷量,这个电荷量就叫电容C。
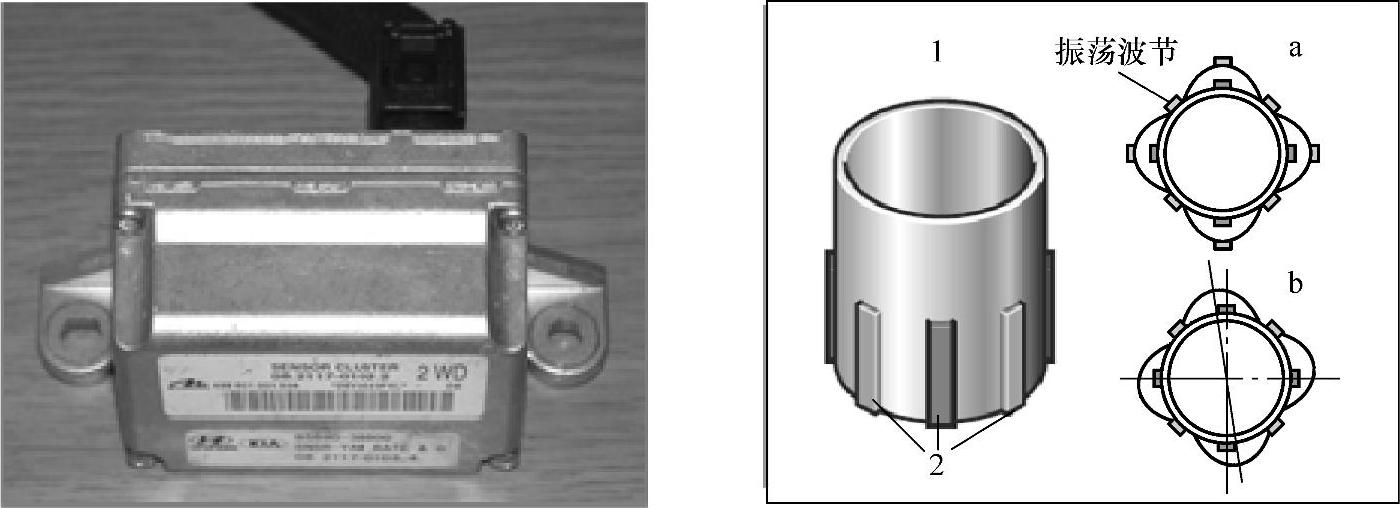
图1-37 横摆角速度传感器示意图
1—空心筒 2—压电元件 a—振荡波节 b—波节的移动
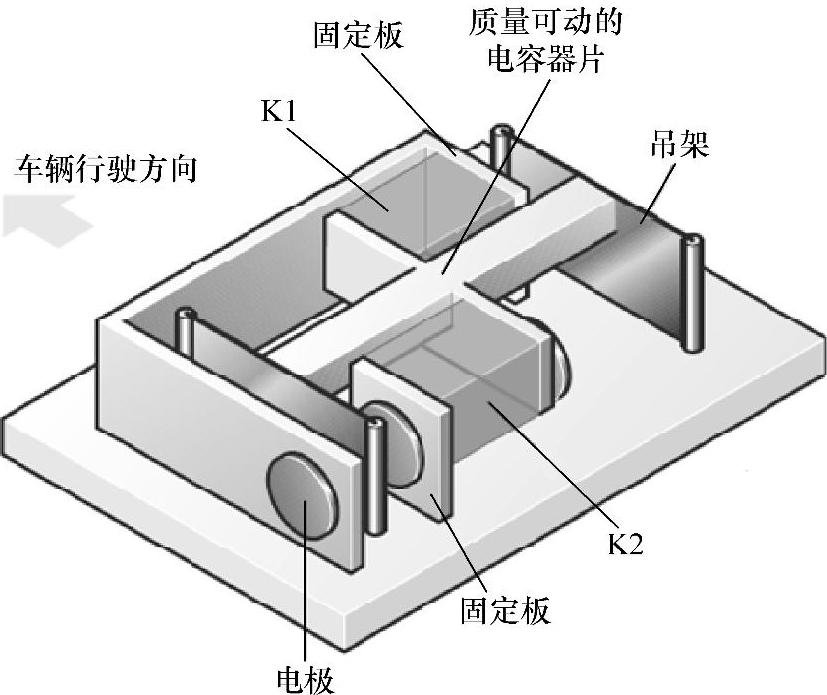
图1-38 横向加速度传感器的结构示意图
如果没有加速度作用在这个系统上,那么测出来的两个电容器的电荷量C1和C2是相等的,如图1-39所示。若作用有横向加速度,那么可移动质量就会因惯性而作用到固定板上,即它会顶着固定板并逆着加速度方向移动。于是两板之间距离改变,相应的分电容器的电荷量也就增加了。如图1-40所示,对于电容器K1,若两板间距离增大,那么其电容C1就变小;对于电容器K2,若其两板距离变小,那么其电容C2就变大。
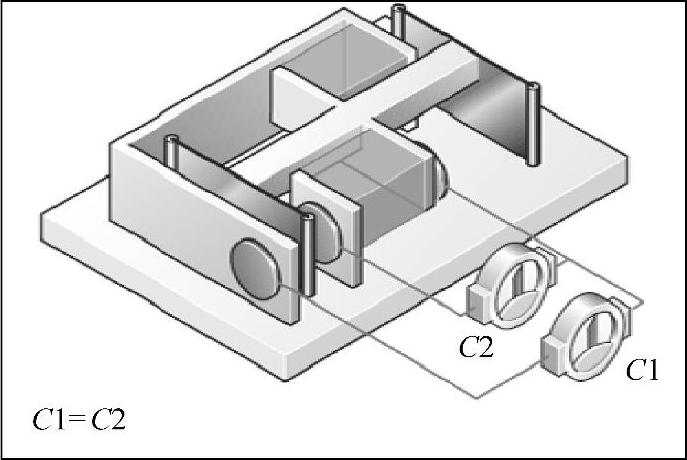
图1-39 没有加速度作用
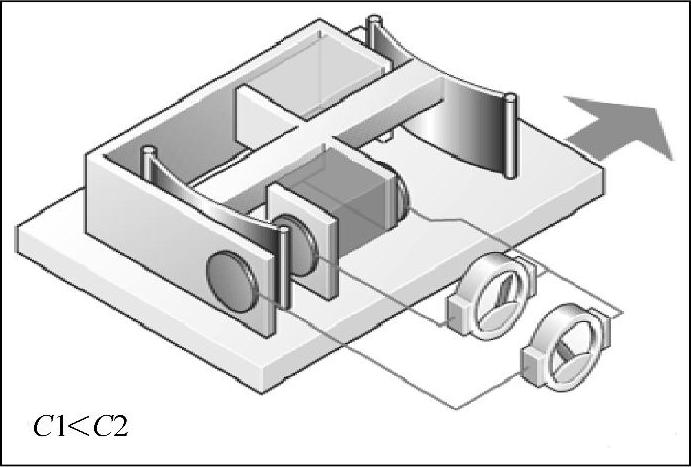
图1-40 有加速度作用
在同一板上,还有横摆角速度传感器,该传感器与横向加速度传感器在空间上是分开的。在恒定磁场的S极和N极之间的托架内放一个可摆动的质量块,并在质量块上制出导电轨道,为安全起见,一般为两个,如图1-41所示。
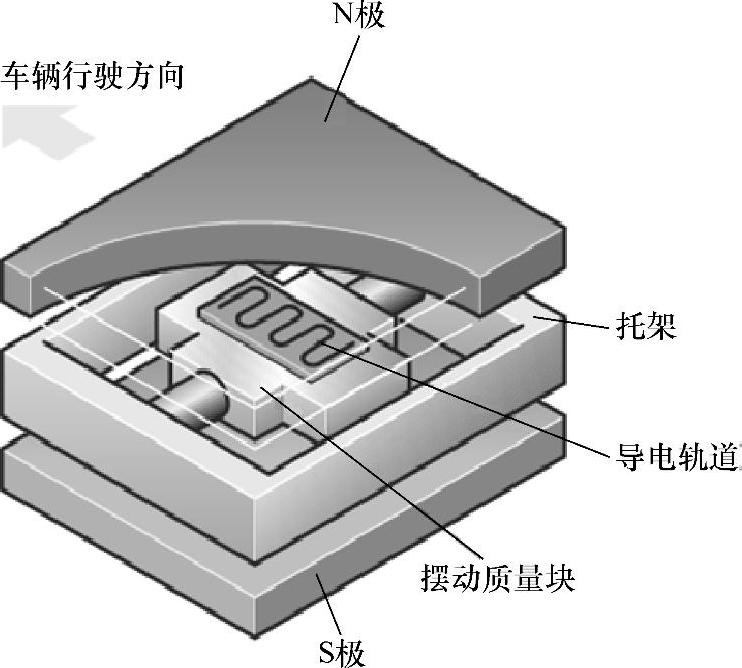
图1-41 横摆角速度传感器的构造
当导电轨道接入交流电压,那么支撑导电轨道的托架就会在磁场里来回摆动,如图1-42所示。如果现在有一个旋转加速度作用在此结构上,则由于惯性作用,摆动质量块由于科氏加速度使质量块偏离了来回摆动的方向,又因为这一切运动的变化都是发生在磁场中的,因此导电轨道的电气性能也改变了。测量出这个变化量就可以知道科氏加速度的大小和方向,MCU根据这个值即可算出相应横摆角速度大小,如图1-43所示。
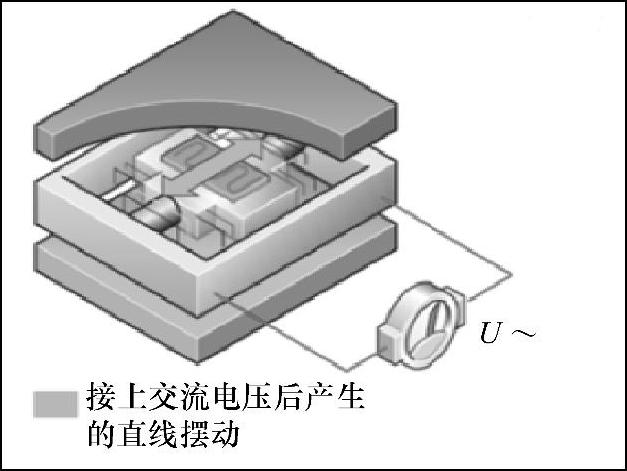
图1-42 静止导轨时的电压
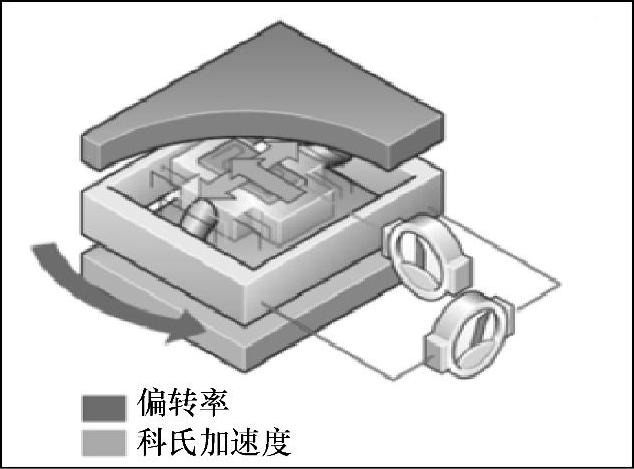
图1-43 旋转运动时的电压
(6)制动力传感器
制动力传感器如图1-44所示,安装位置在行驶动态调节液压泵内。
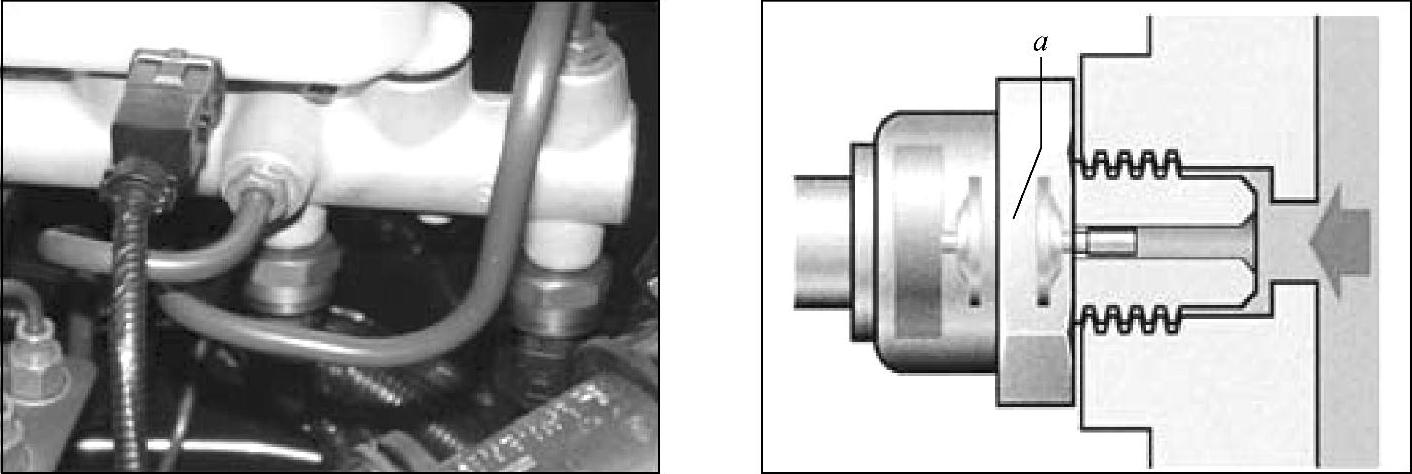
图1-44 制动力传感器
该传感器向电子控制单元提供制动管路内的实际压力信号。电子控制单元根据这个压力信号计算出车轮制动力及作用在车上的纵向力。如果需要ESC工作,控制单元就会将该值用于计算横向力。
该传感器的核心部件为一个压电元件,当制动液压力作用在传感器上时,该元件的电荷分布就会发生改变。如果没有压力作用,电荷分布是均匀的。有压力作用时,电荷分布在空间会发生变化,从而产生了电压。压力越大,电荷分离的趋势越强,产生的电压也越高。这个产生的电压由电子放大电路放大,然后作为信号传给控制单元。电压的高低就是制动力大小的直接反映。
2.液压调节器
液压调节器是汽车ESC控制系统的主要执行机构,其基本结构与ABS/TCS液压调节器相似,只是为了提高响应速度,汽车ESC控制系统的液压调节器比ABS/TCS液压调节器多了预压泵(PCP:Pre-ChargePump)和压力生成器(PGA:PressureGeneratorAssembly),如图1-45所示。
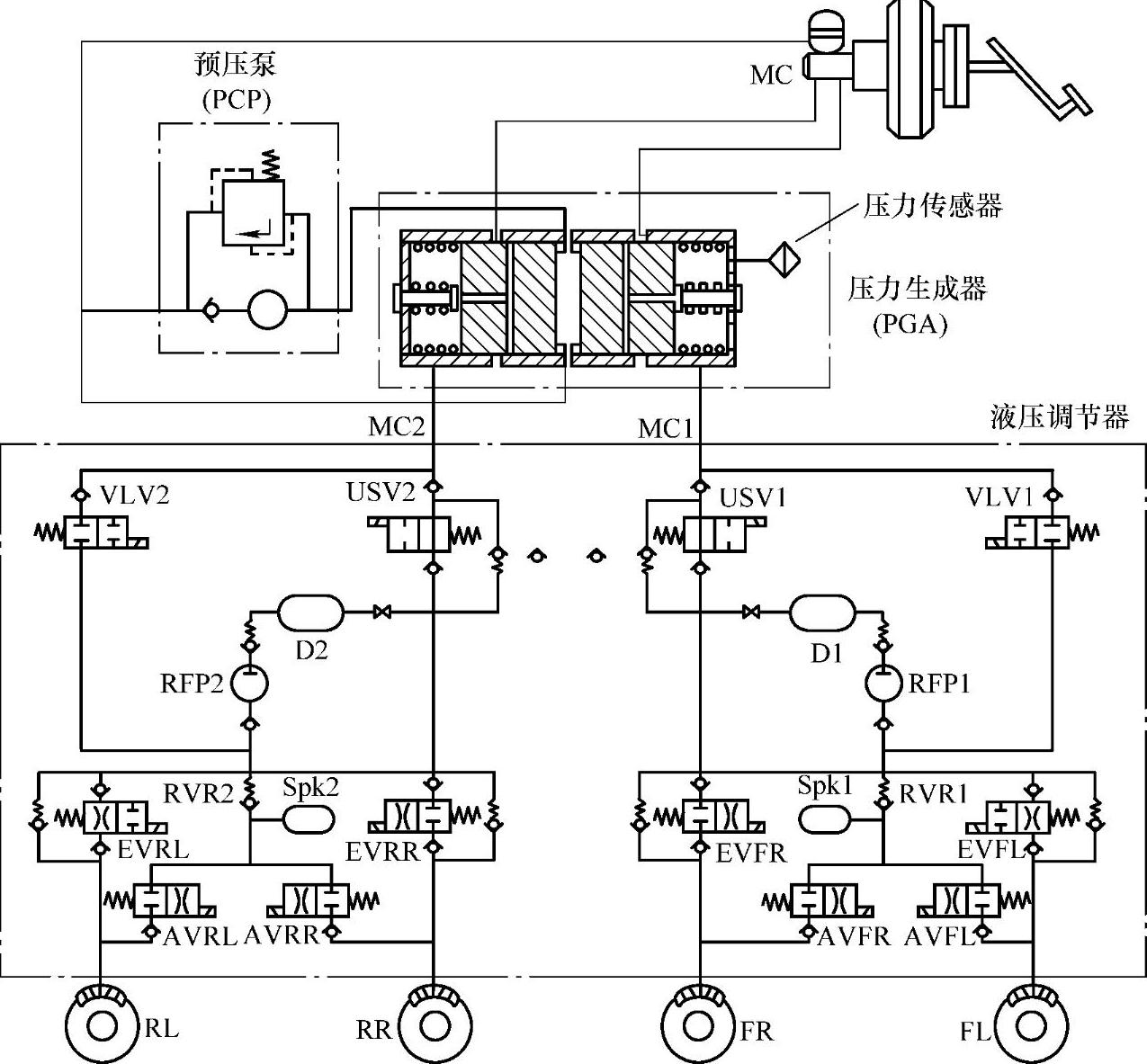
图1-45 Bosch液压调节器HU5.0的结构
HU5.0液压调节器分为MC1和MC2两个独立的管路,分别控制前轮和后轮。每一制动轮缸通过两个电磁阀EV和AV的通断来产生升压、降压和保压状态。当EV和AV都处于断电状态时处于升压状态;都处于通电状态时处于降压状态;当EV处于通电状态而AV处于断电状态时处于保压状态;EV处于断电状态而AV处于通电状态的组合是禁止出现的。Spk为低压蓄能器,用于维持低压状态;RFP为回油泵,它把低压蓄能器中的制动液送回主油路,用于补偿降压过程中损失的制动液,保持油路的连续;D为串联的阻尼器,用于吸收液压调节造成的压力脉动。以上部分与ABS液压调节器的结构基本一致。汽车ESC控制系统的液压调节器要求在驾驶人没有踩制动踏板时也要产生足够的轮缸压力,因此在ABS液压调节器的基础上又增加了两种控制电磁阀(VLV和USV)以产生这种功能。当VLV和USV均断电的情况下,在PCP未起动时EV阀前端的压力就是由驾驶人通过踩制动踏板产生的。当VLV和USV均通电时,VLV与主油路相连,USV切断与主油路通路,这时回油泵RFP起动,使得制动管路产生汽车稳定性控制所需要的压力。由于在低温下制动液黏性很高,为了提高主动制动(驾驶人不踩制动踏板)时压力建立的响应速度,引入了预压泵PCP,PCP起动后,由PGA产生的压力通过VLV阀施加到回油泵的吸油端,使之产生一定的预压,从而提高响应速度。PCP运行过程中会产生一些泡沫,为了防止这些泡沫进入制动系统而影响制动效果,于是在PCP与主油路间增加了压力生成器(PGA),用于阻断泡沫并能传递PCP产生的压力。此外,PGA还可以协调驾驶人踩下的压力与PCP产生的压力之间的关系,把二者中的较大的压力传递到主油路。
3.电子控制单元ECU
电子控制单元(ECU:ElectronicControlUnit)是汽车ESC控制系统的核心部件,它是控制逻辑的载体,用来处理各种传感器信号,驱动执行机构动作,从而构成控制闭环。
ECU一般具有两个微处理器,一个用来计算控制逻辑,另一个用于故障诊断和处理,两个微处理器通过内部总线相互交换信息。除了微处理器以外,ECU还包括电源管理模块、传感器信号输入模块、液压调节器驱动模块、各种指示灯接口以及CAN总线通信接口等。
现在的ECU大多与液压调节器安装在一起,通过电磁线圈与电磁阀阀芯之间的电磁耦合连接,这样不仅减少了连线的长度,并且结构紧凑。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。