



异步电动机的矢量控制是建立在动态数学模型的基础上的。数学模型的推导是一个专门性的问题,不准备具体说明,仅就矢量控制的概念作简要的说明。
直流电动机所以动态性能好,是由于在采用补偿绕组的条件下,它的电枢反应磁动势对气隙磁通Φ没有影响,而电磁转矩T=CTΦIa,不考虑磁路饱和,磁通Φ正比于励磁电流If。保持If恒定时,电磁转矩与电枢电流成正比。影响电磁转矩的控制量If和Ia是互相独立的,也可以说是自然解耦的。Ia的变化并不影响磁场,因此可以以控制电枢电流Ia的速度去控制电磁转矩。而Ia的变化所遇到的仅是电枢漏电感,所以响应速度很快。可以实现转矩的快速调节,获得理想的动态性能。
直流电动机的磁通Φ和电枢电流Ia可以独立进行控制,是一种典型的解耦控制。异步电动机的矢量控制就是仿照直流电动机的控制方式,把定子电流的磁场分量和转矩分量解耦开来,分别加以控制。这种解耦,实际是把异步电动机的物理模型设法等效地变换成类似于直流电动机的模式。这种等效变换是借助于坐标变换来完成的。等效的原则是,在不同坐标系下电动机模型所产生的磁动势相同。
异步电动机的三相静止绕组U、V、W通以三相平衡电流iU、iV、iW,产生合成旋转磁动势F1。F1以同步角速度ω1按U-V-W的相序所决定的方向旋转,如图2-53a所示。产生同样的旋转磁动势F1不一定非要三相,用图2-53b所示的两个互相垂直的静止绕组α和β,通入两相对称电流同样可以产生相同的旋转磁动势F1。只不过iα1、iβ1和iU、iV、iW之间存在某种确定的换算关系而已。找到这种关系,就完成了三相静止坐标系到两相静止坐标系的变换,即U、V、W轴系到α、β轴系之间的坐标变换。如果选择互相垂直且以同步角频率ω1旋转的M、T两相旋转绕组,如图c所示,只要在其中通以直流电流im1和it1,也可以产生相同的旋转磁动势F1。显然im1、it1和iα1、iβ1之间也存在确定的变换关系。找到这种关系,则可以完成α、β两相静止坐标系到M、T两相旋转坐标系之间的坐标变换。站到M、T坐标系中去观察,M和T绕组是通以直流的静止绕组。如果人为控制全磁链Ψ2的位置使之与M轴相一致,则M轴绕组相当于直流电动机的励磁绕组,T轴绕组相当于直流电动机的电枢绕组。
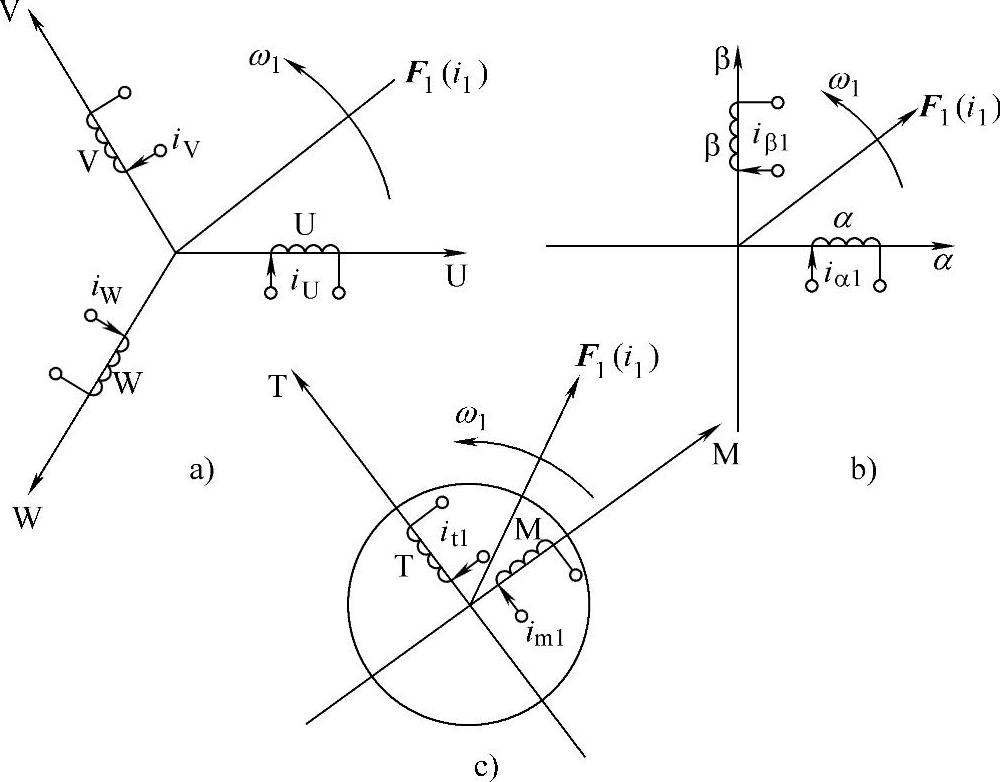
图2-53 等效的交流电动机物理模型
a)三相交流绕组 b)等效二相交流绕组 c)等效直流旋转绕组
在进行异步电动机的数学模型变换时,定子三相绕组和转子三相绕组都得变换到等效的两相绕组上去。等效的两相模型之所以相对简单,主要是由于两轴互相垂直,它们之间没有互感的耦合关系,不像三相绕组那样任意两相之间都有互感的耦合。等效的两相模型可以建立在静止坐标系(即α、β坐标系)上,也可以建立在同步旋转坐标系(M、T坐标系)上。建立在同步旋转坐标系上的模型有一个突出的优点,即当三相变量是正弦函数时,等效的两相模型中的变量是直流量。如果再将两相旋转坐标系按转子磁场定向时,即将M、T坐标系的M轴取在转子全磁链Ψ2的方向上,T轴取在超前其90°的方向上。则在M、T坐标系中电动机的转矩方程式可以简化得和直流电动机的转矩方程十分相似。
根据上述坐标变换的设想,三相坐标系下的交流电流U、V、W通过三相/两相变换可以等效成两相静止坐标系下的交流电流iα1、iβ1;再通过按转子磁场定向的旋转变换,可以变换成同步旋转坐标系下的直流电流im1、it1。如果站在M、T坐标系上,观察到的便是一台直流电动机。上述变换关系用结构图的形式表示在图2-54中右侧的双线框内。从整体看U、V、W三相交流输入,得出转速ωr输出,是一台异步电动机。从内部看,经过三相/两相变换和同步旋转变换,则变成一台输入为im1、it1,输出为ωr的直流电动机。
既然异步电动机可以等效成直流电动机,那么就可以模仿直流电动机的控制方法,求得等效直流电动机的控制量。再经过相应的反变换,就可以按控制直流电动机的方式控制异步电动机了。如图2-54所示,点划线框内所示的两相/三相变换和三相/两相变换、VR-1和VR变换实际上互相抵消了。如果再忽略变频器本身可能产生的滞后,那么点划线框以内完全可以删去。点划线框外则成了一个直流调速系统。
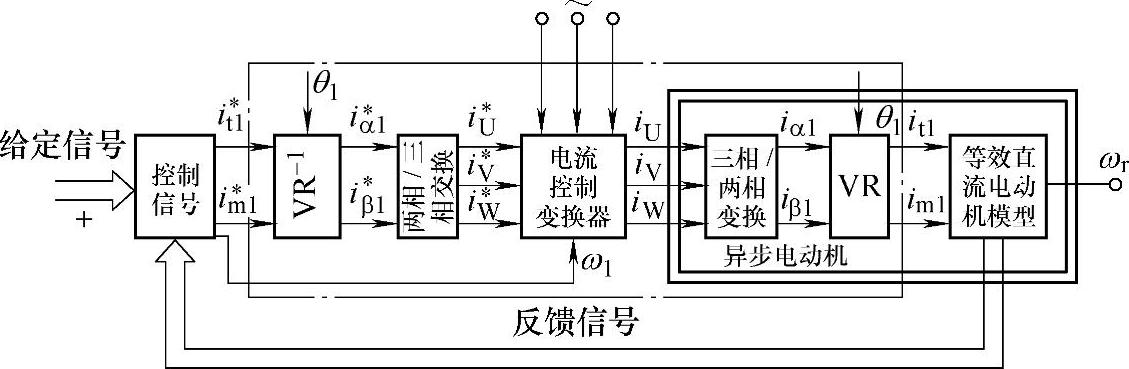
图2-54 矢量变换控制的构想(https://www.xing528.com)
VR—同步旋转变换 θ1—M轴与α轴(U轴)间夹角 VR-1—反旋转变换
图2-54所示的控制器类似于直流调速系统中所用的控制器,它综合给定信号和反馈信号,产生励磁电流给定值im1和电枢电流给定值 ,经过反旋转变换VR-1得到
,经过反旋转变换VR-1得到 和
和 ,再经过两相/三相变换得到
,再经过两相/三相变换得到 、
、 和
和 。带电流控制的变频器根据
。带电流控制的变频器根据 、
、 、
、 和ω1信号,可以输出异步电动机所需的三相变频电流。
和ω1信号,可以输出异步电动机所需的三相变频电流。
目前最常用的矢量控制方案,是按转子磁场定向的矢量控制。如图2-55所示,取α轴与U轴相重合,M轴与转子全磁链Ψ2相重合。M轴与U轴(α轴)之间的相角用θ1表示,则 。ω1=2πf1是定子电流的角频率。代表定子磁动势的空间矢量电流为i1,被分解为M轴方向上的励磁分量im1和T轴方向上的it1。可以证明异步电动机电磁转矩为
。ω1=2πf1是定子电流的角频率。代表定子磁动势的空间矢量电流为i1,被分解为M轴方向上的励磁分量im1和T轴方向上的it1。可以证明异步电动机电磁转矩为
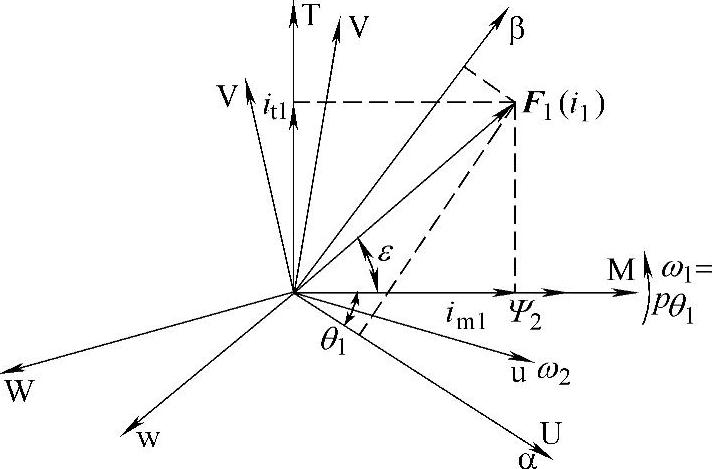
图2-55 U、V、W、α、β和M、T坐标系与磁动势空间矢量

而转子磁链为

式中 Lm——定转子之间的互感;
Lr——转子电感,Lr=Lm+l2(l2为转子漏电感);
T2——转子时间常数,T2=Lr/r2。在转子磁场定向中,如能保持式(2-23)中的im1恒定,即保持Ψ2恒定,则电磁转矩与定子电流的有功分量it1成正比。在旋转坐标系中,对电磁转矩的控制与对直流电动机的控制完全相类似。要知道,对于异步电动机,可检测、可控制的量是定子三相电流iU、iV和iW。所以必须经过类似于图2-54所示的坐标变换,才能在控制电路中按控制直流量im1、it1的方式进行调节控制,而在电动机端则再回到对交流量的控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。