



1.三轴协调控制
协调运动控制,除了二维的运动控制外,理论上讲也可进行多维控制。如三维控制要控制3个坐标协调运动,其运动轨迹为空间曲线或形成曲面。当今数控机床可实现5坐标联动控制。
(1)曲线轨迹
最简单的算法是目标追踪。上述螺旋线轨迹为平面曲线,如再增加一个垂直坐标Z,用的参变量也是θ,如Z与θ的关系为
Z=kz∗θ
则将可实现对立体螺旋线的轨迹运动。
还是一句话,只要能列写参变量表达式,什么轨迹的运动控制,均可实现。再就是用数表法用于多轴控制也很方便。
(2)曲面形成
常用的形成是用“行切法”。办法是,把曲面与平行于坐标面的平面(如平行于XY坐标面的平面)相截。选取不同Z值,将生成不同的平面曲线。如能弄清这些平面曲线的解析式子,则可用目标追踪控制在这个平面上的X、Y运动,以形成所要求的轨迹。如Z值能在其定义域内依次全部选取,则这些轨迹的叠加,即可形成所要求的曲面。
当然,这里的程序设计是困难的。而且控制速度与控制规模的矛盾将更加突出。所以,较高性能的运动控制还是使用专用的硬件模块为好。(https://www.xing528.com)
2.虚拟轴运动控制
1965年,Stewart提出著名的用于安装天文望远镜的Stewart平台机构。并联机床(Parallel Machine Tool,简称PMT),也被称为虚(拟)轴机床(Virtual Axis Machine Tool),也就是基于Stewart并联机构的研究而发展起来的。在1994年美国芝加哥机床展上,它首次面世。
图3-59a所示为一种这样机床的内部结构。在这里的多菱体桁架的5个面上,安装有滚珠丝杆的支点——万向铰链,5根丝杠的另一端通过铰链与主轴部件的5个可转动同心外环连接。改变2个支点间的距离,即可使主轴部件处于不同工作位置。5杆并联机构驱动的主轴部分如图3-59b所示。
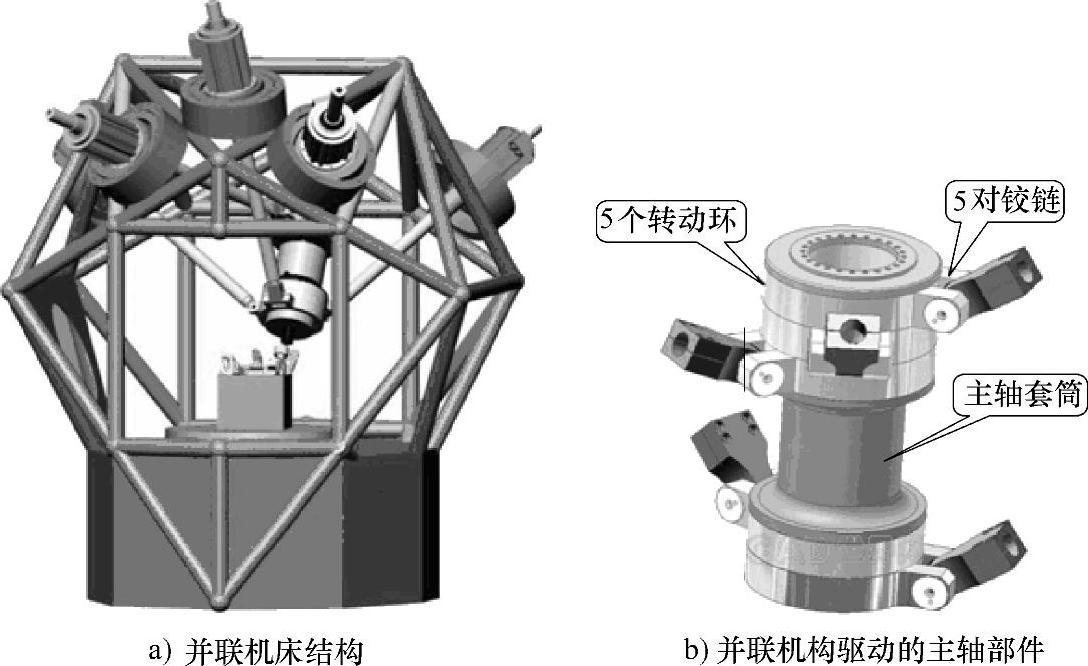
图3-59 并联机床结构及主轴部件
这种新型机床结构合理、运动部件磨损小;具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点;还适合于模块化生产;对于不同的机器加工范围,只需改变连杆长度和触点位置;维护也容易,无须进行机件的再制和调整,只需改变机构的参数。
此外,还有由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。类似的,也还有并联工作的机械手。也是通过虚拟轴的伸缩达到控制运动轨迹或目标位置的目的。
由于此类机床或机械手没有实体坐标系,其设计与运行要用到复杂的数学计算与推理,即所谓要“用数学制造机床”。所以,它的坐标系与工件坐标系的转换都是靠软件完成,其控制也是用计算机实现。相信随着这种机床与机械手应用的普及,以及PLC运动控制技术的进步,利用PLC对其实施控制也将是可能的。因此,对此先做些了解也是必要的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。