



电气制动是电动机停机时使电动机产生一个与电动机旋转方向相反的电磁转矩,起到制动作用。这时电动机将轴上吸收的机械能转换成电能,该电能消耗于转子电阻上或反馈回电网。电气制动有能耗制动、反接制动、再生回馈制动和电容制动等。电气制动可以使电力拖动系统尽快停车或减速,对于位能性负载还能获得稳定的下降速度。
1.反接制动
三相异步电动机的反接制动可分为电源反接制动和倒拉反接制动两种。
(1)电源反接制动:使用改变电动机定子绕组电源相序的方法来获得制动力矩叫做反接制动。当电动机需要停转制动时,先使电动机脱离电源,然后迅速给电动机接上一个与电动状态相序相反的电源,使电动机产生一个与原转动方向相反的电磁转矩,电动机转速迅速下降并最终停转。但在电动机转速接近零值时,应立即切断反接制动电源,否则,电动机将反向起动。为了能在电动机转速接近零值时及时切断电动机的反接制动电源,防止反转起动,通常在制动电路中接入一个速度继电器KS,速度继电器的转子与电动机的轴相连,电动机运转时,速度继电器KS的转子跟随旋转,当转速等于或超过120r/min时,KS的常开触头闭合;电动机在制动过程中转速接近零值时,例如转速从每分钟几千转降至低于100r/min时,KS的常开触头断开。
单向运转电动机的电源反接制动控制电路如图4-28所示,图中KM1是运转接触器,KM2是反接制动接触器,KS是速度继电器,R是反接制动限流电阻,可以防止制动过程中电流过大。
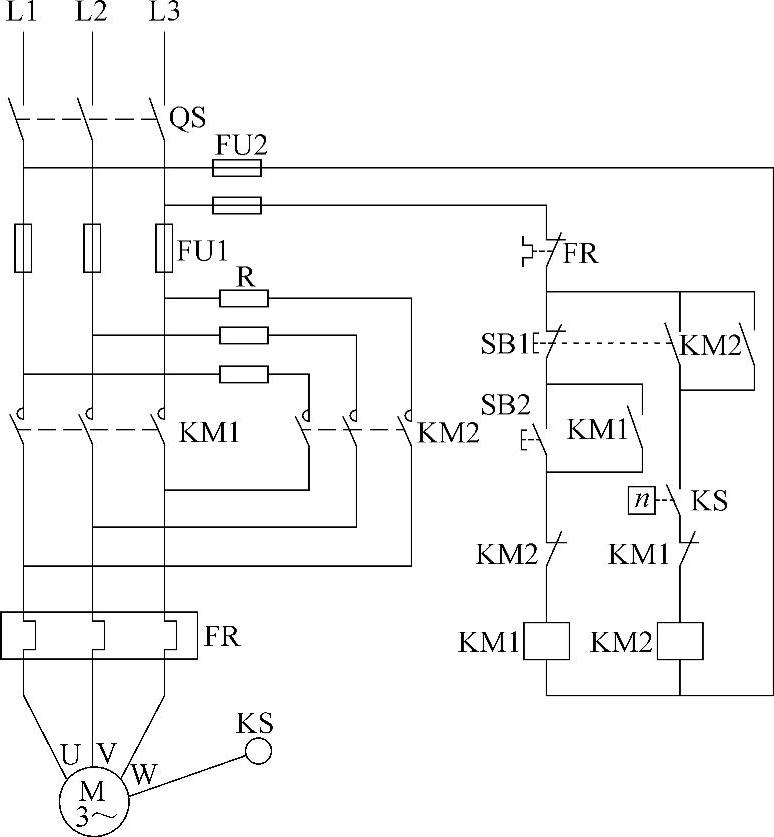
图4-28 电动机单向运转反接制动控制电路
单向运转电动机电源反接制动方式的具体操作与动作顺序如下,首先合上电源开关QS,之后如果准备起动电动机,则按下起动按钮SB2,交流接触器KM1线圈通电,接触器KM1的常开辅助触头闭合自锁;使接触器保持在吸合状态;KM1的常闭辅助触头串联在KM2的线圈回路中实现互锁;KM1主触头闭合,电动机M得电起动运转。当电动机转速达到较高数值时,速度继电器KS的常开触头闭合,成为反接制动接触器KM2线圈通电的条件之一。
电动机停机制动时,按下停止按钮SB1,接触器KM1的线圈断电,常开辅助触头断开,KM1的自锁解除,主触头断开,电动机M断电停机;KM1的常闭辅助触头闭合,成为反接制动接触器KM2线圈通电的另一个条件;按下停止按钮SB1使该按钮的常开触头闭合,由图4-28可见,反接制动接触器KM2线圈的电源已经接通,KM2的主触头闭合,经限流电阻R将电动机接入一个与电动状态相序相反的电源,电动机开始反接制动,转速迅速降低,当电动机转速降低至100转左右时,速度继电器KS的常开触头断开,接触器KM2线圈断电释放,制动过程结束。
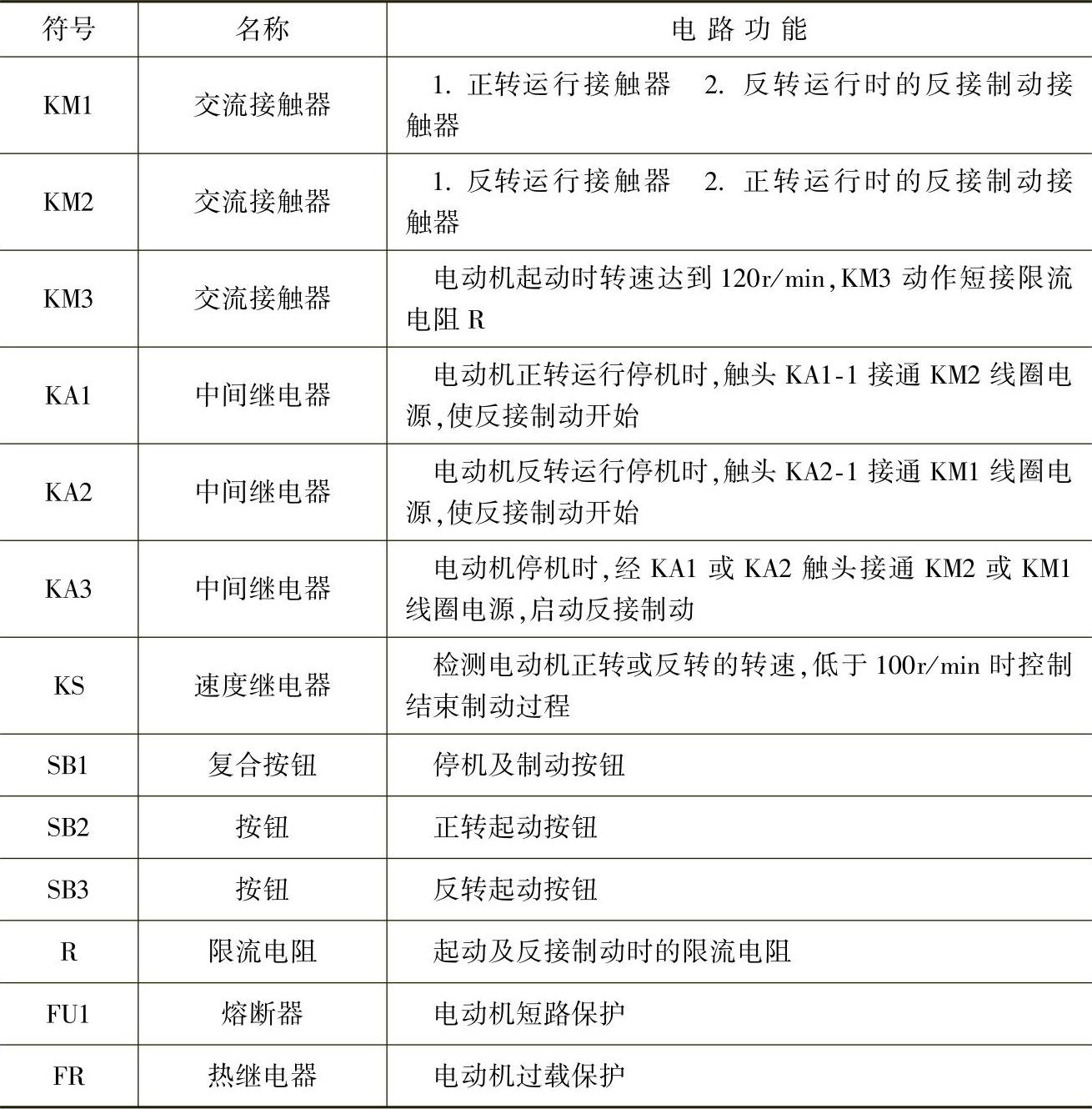
双向运转电动机的电源反接制动控制电路如图4-29所示,该电路使用的电器元件见表4-4。
表4-4 双向运转电动机的电源反接制动控制电路电器元件表
双向运转电动机的电源反接制动控制电路,正向运转时的起动过程分析如图4-30所示。
双向运转电动机的电源反接制动控制电路,正向运转时的制动过程分析如图4-31所示。
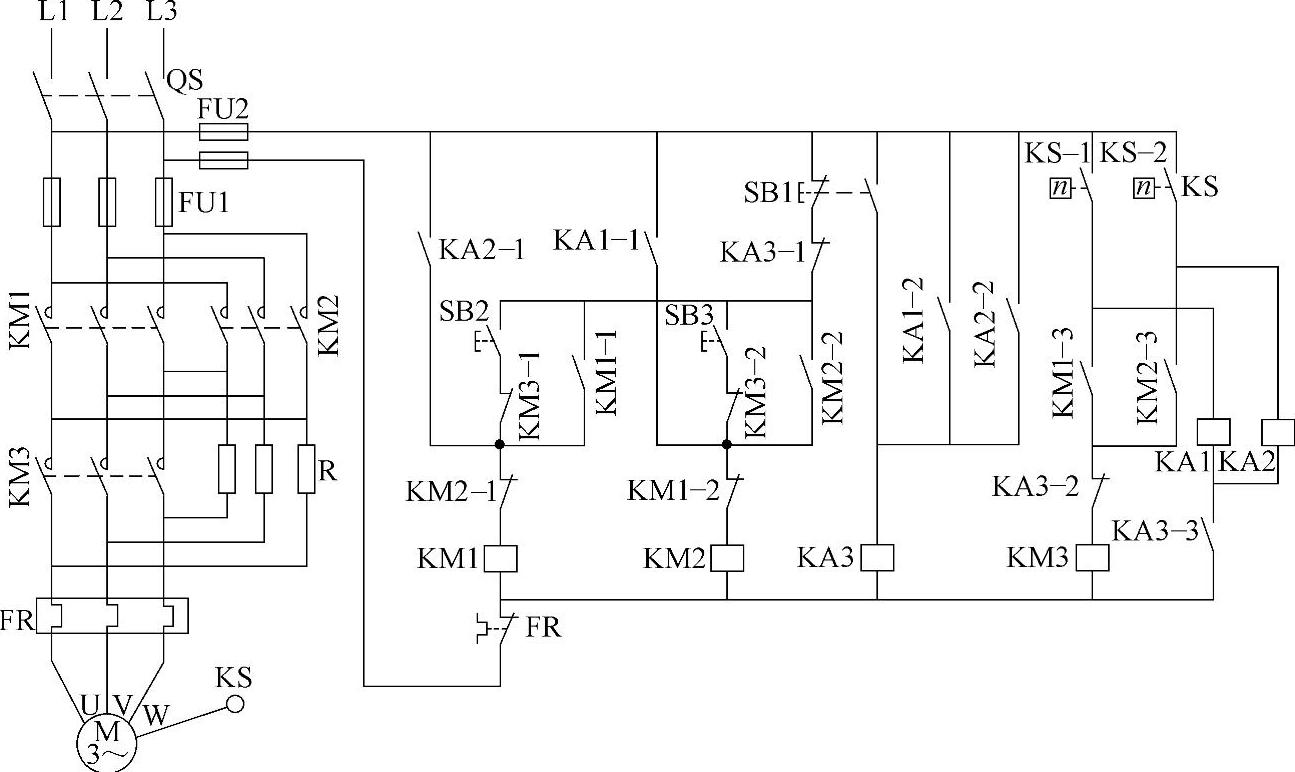
图4-29 双向运转电动机电源反接制动控制电路
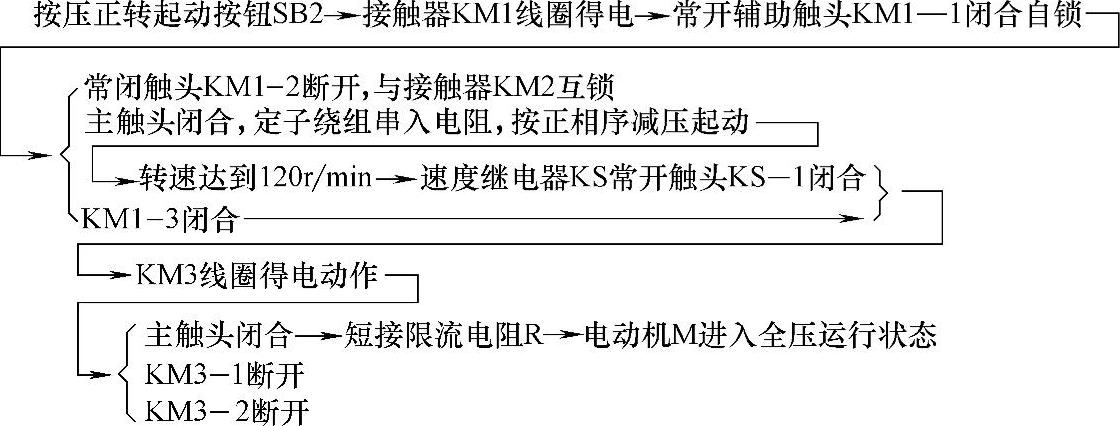
图4-30 双向运转反接制动控制电路的正向运转起动过程
电动机反向运转的起动、以及停机时的反接制动过程与上述分析相似,区别有三:一是正向运转起动使用按钮SB2,反向运转起动使用按钮SB3;二是正向运转起动时给电动机接通正相序电源的是接触器KM1,而反向运转起动时给电动机接通反相序电源的是接触器KM2;三是正向运转的停机制动由速度继电器的KS-1触头和中间继电器KA1参与控制,而反向运转的停机制动由速度继电器的KS-2触头和中间继电器KA2参与控制。
(2)倒拉反接制动:三相绕线转子型异步电动机拖动位能性负载倒拉反接制动的原理可参见图4-32a,这里我们引用三相异步电动机的机械特性曲线进行讨论。电动机转速与电磁转矩关系的曲线称为机械特性曲线,它是研究电动机起动、控制、制动、调速的重要工具,用机械特性曲线来分析电动机的工作情况有时更为方便。电动机工作在额定电压和额定频率下,定子绕组按规定方式连接,定子和转子电路不外接电阻等其他元件,由电动机本身固有的参数所决定的机

图4-31 双向运转反接制动控制电路的正向运转反接制动过程
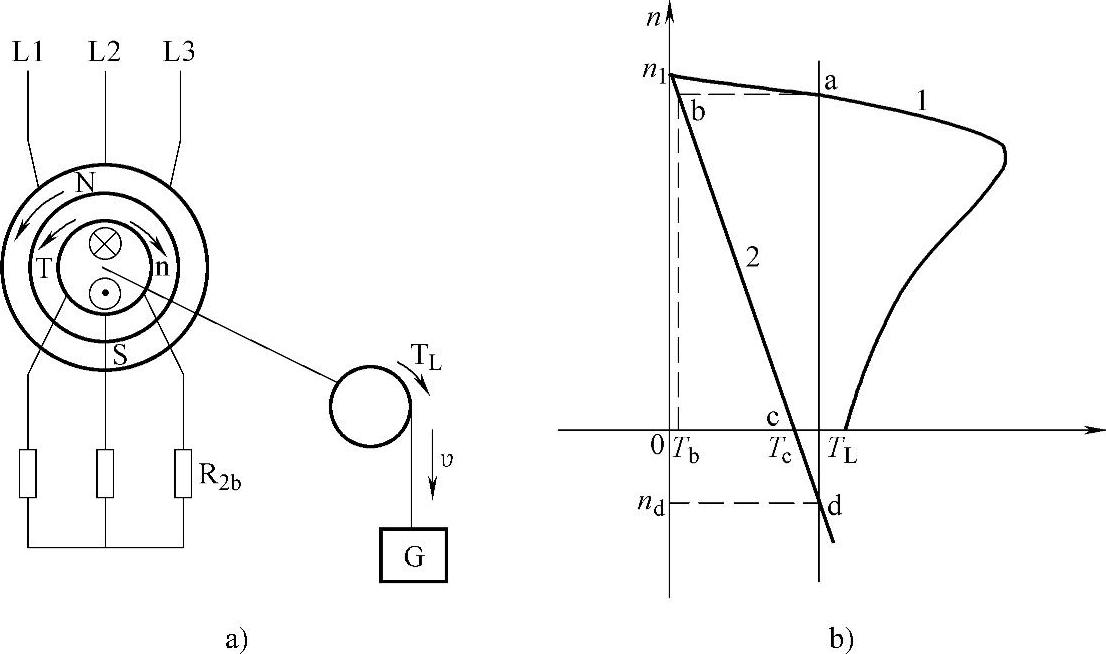
图4-32 三相异步电动机倒拉反接制动 a)原理图 b)机械特性曲线
械特性称为固有机械特性。电动机正常运行时其工作点就在这条固有机械特性曲线上,如图4-32b曲线1的a点。人为地改变异步电动机定子电压、电源频率、定子极对数、定子回路电阻或电抗、转子回路电阻或电抗等参数中的一个或多个参数所获得的机械特性,称为人为机械特性,例如图4-32b中曲线2就是在电动机转子回路中串入电阻R2b(见图4-32a)以后获得的人为机械特性。
电动机正常提升重物时运行在图4-32b的固有机械特性曲线1的a点,如果在电动机转子回路中串入电阻R2b,则得到一条新的人为机械特性2。在串入电阻瞬间,电动机转速因机械惯性来不及变化,所以电动机的工作点从固有机械特性曲线1的a点平移至人为机械特性2的b点(因为a点和b点对应的转速相同),由于b点对应的电磁转矩Tb小于a点对应的负载转矩TL,拖动系统开始减速,当转速降低为0工作点已经到达曲线2的c点时,电动机的电磁转矩Tc仍然小于负载转矩TL,在位能负载的重力作用下拖动电动机反向旋转,此时电动机的转速n<0,而电磁转矩T>0,所以电磁转矩T成为制动转矩,电动机进入反接制动状态。在位能负载重力作用下,电动机反转加速,由人为机械特性2可见,其电磁转矩逐渐增大,当达到曲线2的d点时,Td=TL,即电磁转矩等于负载转矩,此时电动机转速稳定在nd上,以稳定的转速下放重物,处于稳定制动运行状态。
只要适当选择电动机转子回路的串联电阻R2b,倒拉反接制动能获得任意低的转速来下放重物,所以安全性较好。
2.能耗制动
将运行中的电动机从交流电源上切除并立即在定子绕组任意两相中通入直流电源,迫使电动机迅速停转的方法称为能耗制动。流过电动机定子绕组的直流电流在电动机中产生一个静止的恒定磁场,而转子因惯性仍然按原方向旋转,转子导体切割恒定磁场产生的感应电动势和感应电流与恒定磁场相互作用产生电磁力与电磁转矩,该电磁转矩的方向与转子旋转方向相反,因此起到制动作用。这种制动是将转子动能转换为电能消耗在转子回路电阻上,动能消耗殆尽最终使转子停转,所以称作能耗制动。能耗制动常采用两种方法,一是无变压器的半波整流能耗制动电路,二是有变压器的桥式整流能耗制动电路。
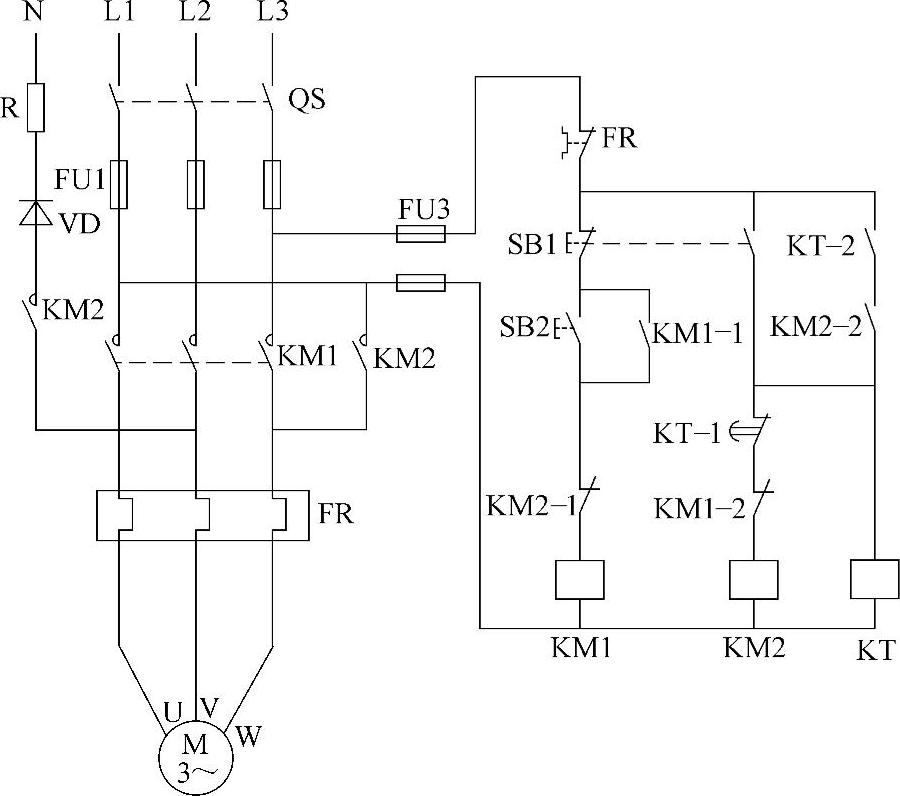
图4-33 无变压器的半波整流能耗制动电路(https://www.xing528.com)
(1)无变压器的半波整流能耗制动电路:这种能耗制动电路的控制电路如图4-33所示,采用一只二极管进行半波整流作为直流电源,因此电路简单,成本低,常用于10kW以下小容量电动机。这种制动电路的工作过程分析如下。
电动机起动运行时,按下起动按钮SB2,这时交流接触器KM1线圈得电动作,其辅助常开触头KM1-1闭合自锁;辅助常闭触头KM1-2切断接触器KM2的线圈通路实现互锁;主触头闭合,电动机起动开始运转。
电动机停机能耗制动时的工作过程分析如图4-34所示。
电动机能耗制动时的直流电流通路是:电源相线L1→开关QS→熔断器FU1→接触器KM2主触头→热继电器FR→电动机W与V接线端子内部的绕组→热继电器FR→接触器KM2主触头→二极管VD→电阻R→电源中线N,形成一个完整回路,其中电阻R用于调整能耗制动电流大小即制动强度。
图4-33中时间继电器KT瞬间动作的常开触头KT-2的作用分析如下:如果不使用该触头,而时间继电器线圈开路使时间继电器失效时,能耗制动电源将不能切断,可能引发设备事故。设计的思路是,时间继电器正常时由KT-1延时断开接触器KM2的线圈电源,结束能耗制动;时间继电器线圈开路损坏时,由于不能用使用KT-1延时断开接触器KM2的线圈电源,则由瞬动触头KT-2断开接触器KM2的线圈自锁通路,使制动电源不至于长时间通电。如果操作人员事先知晓时间继电器故障,可以通过持续按压停机制动按钮SB1的方法直至制动结束松开按钮。如果操作人员事先不知晓时间继电器故障,与正常操作一样,只点按一下停机制动按钮SB1,这时电动机将停机而无有制动效果。由于这种制动方式常用于对制动要求不高的10kW以下小容量电动机,一般不会产生较大异常。
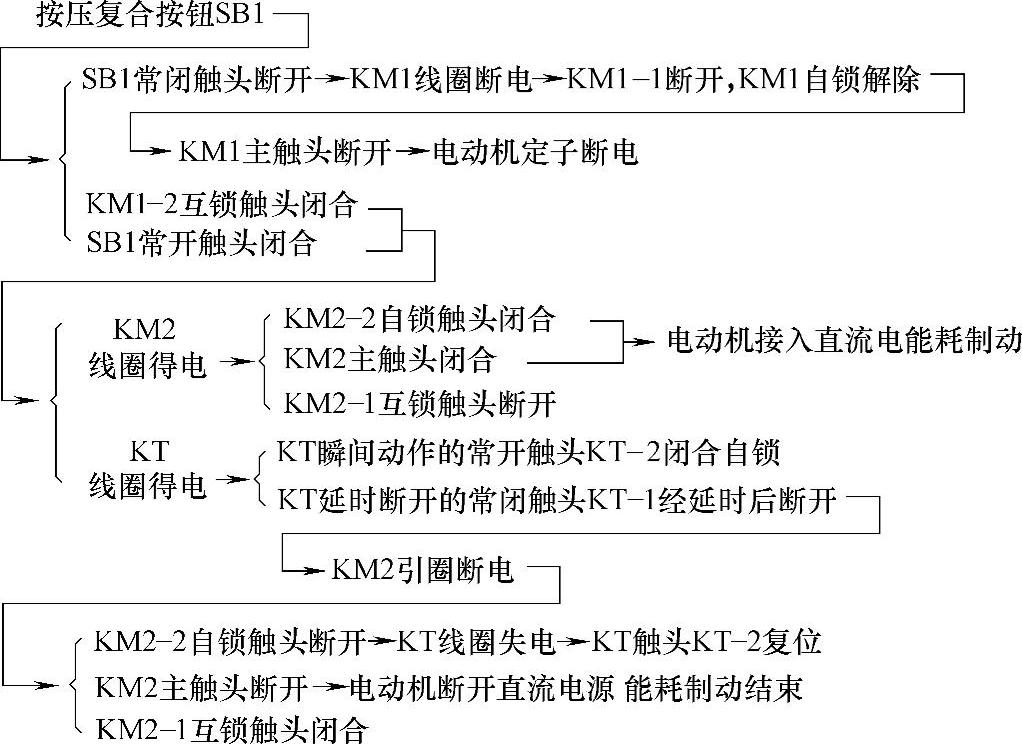
图4-34 电动机停机能耗制动时的工作过程分析
(2)有变压器的桥式整流能耗制动电路:这种制动方式的控制电路如图4-35所示。常用于10kW以上较大容量的电动机。图中T是整流变压器,DZ是单相桥式整流器,电阻R用来调节制动电流,亦即调节制动强度。图4-35与图4-34的二次控制电路相同,原理分析也相同,这里不再赘述。两个电路的区别是能耗制动使用的直流电源不同,一个是半波整流电源,一个是桥式整流电源,由于制动电源容量大小不同,因此适用于不同容量的电动机。
能耗制动的优点是制动平稳、准确,而且能量消耗较小,一般用于要求制动准确、平稳的场合,如机械加工机床等设备中。
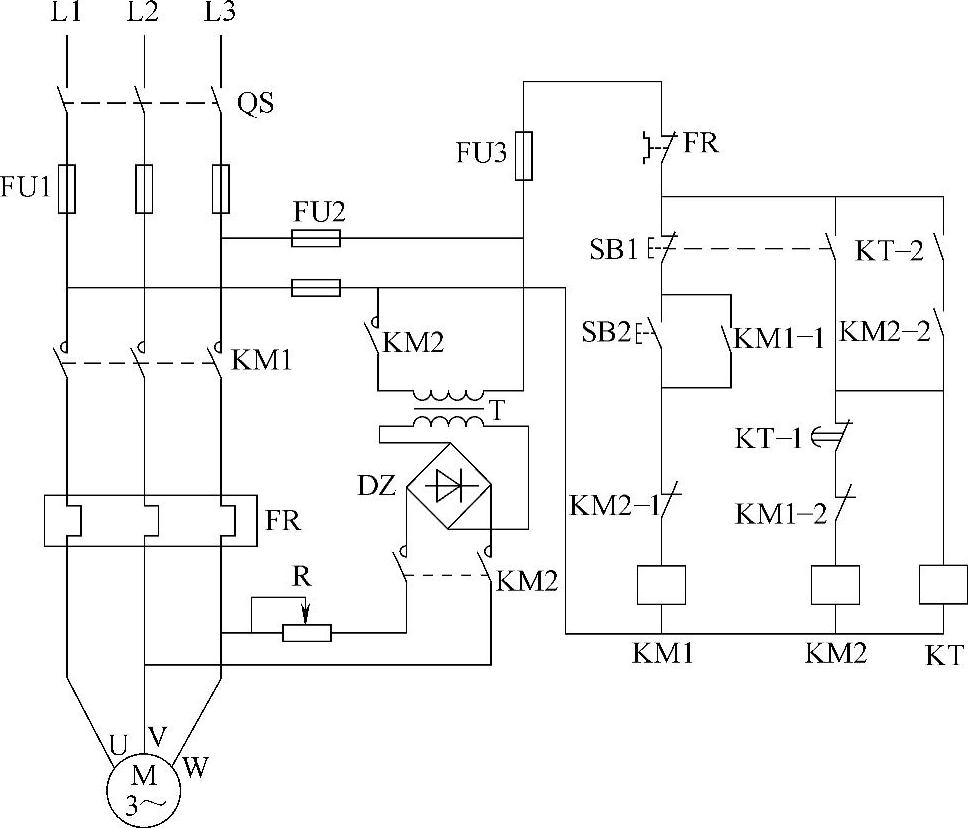
图4-35 有变压器的桥式整流能耗制动电路
3.电容制动
电动机切断交流电源后,立即在电动机电源接线端子上接入电容器,用这样的方法使电动机迅速停止运转称作电容制动。
运转着的电动机突然被切断电源,其转子因惯性原因会继续旋转,电动机切断交流电源后,立即在电动机电源接线端子上接入电容器,用这样的方法对电动机实施制动称作电容制动。
运转着的电动机突然被切断电源,其转子因惯性会继续旋转,电容器产生容性励磁电流,对三相异步电动机进行励磁,这时三相异步电动机与电容器组成三相异步发电机,而制动回路里的电阻R1和R2(见图4-36)就是发电机的负载,这样因惯性而旋转的电动机不断将机械能转换为电能并在电阻上产生热量而消耗掉,从而对电动机产生制动作用。这就是电容制动的基本原理。
图4-36所示为一个电容制动的具体应用电路。
电动机起动运行时,首先合上开关QS,然后按压起动按钮SB2,这时接触器KM1线圈得电,其辅助触头KM1-1吸合自锁;KM1-2断开对接触器KM2线圈互锁;主触头闭合,电动机开始起动运转;KM1-3触头闭合,时间继电器KT线圈得电,其延时断开的常开触头KT-1(线圈通电,瞬间闭合;线圈断电,延时断开)瞬间闭合,为接触器KM2线圈得电做好准备。
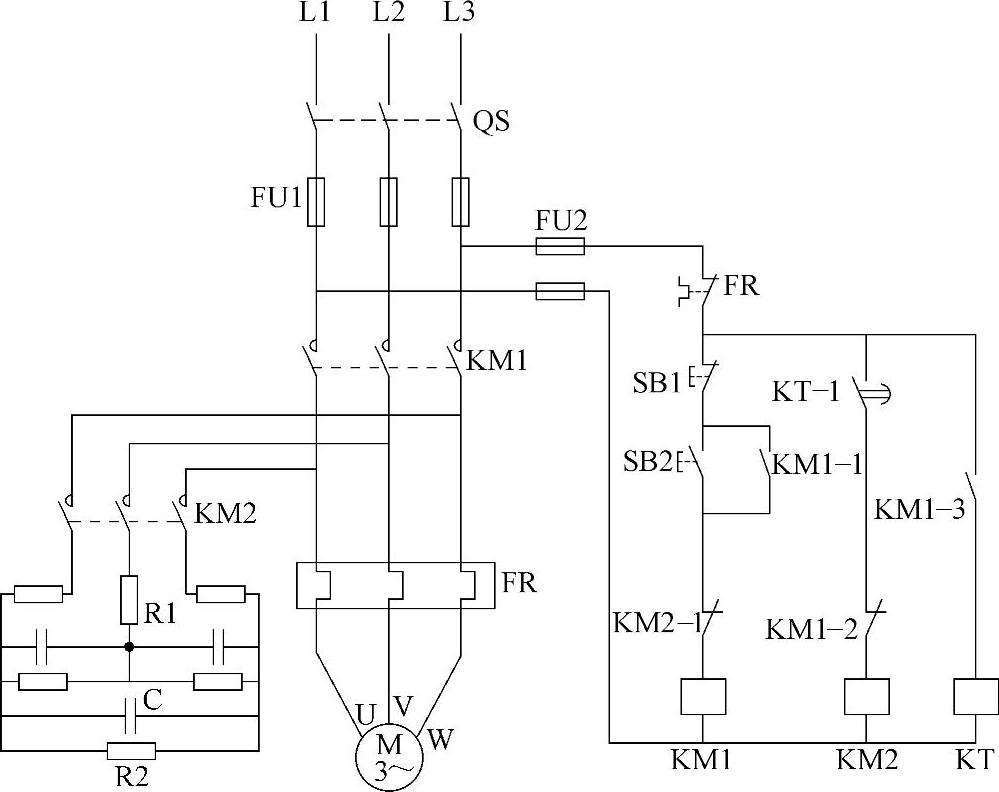
图4-36 电容制动及其控制电路
电动机停机制动时,按一下停机按钮SB1,之后接触器KM1线圈失电,其辅助触头KM1-1断开解除KM1的自锁,同时电动机被切断运行电源;KM1对KM2互锁的触头KM1-2闭合,KM2线圈得电,其主触头闭合,三相制动电容器C接入电路对电动机进行制动;触头KM1-3断开,时间继电器KT线圈失电,其延时断开的常开触头KT-1经延时后断开,接触器KM2线圈失电释放。制动过程结束。
图4-36中的电阻R1起限流、阻尼与保护作用。
4.回馈(发电、再生)制动
当电动机在电动运行状态由于外加转矩的作用,使其转速高于同步转速时,异步电动机进入发电回馈制动状态,电动机转子绕组切割旋转磁场的方向与电动运行状态时相反,电磁转矩方向与电动状态时相反,起制动作用。回馈制动也称发电制动或再生制动。
有两种情况会发生回馈制动,一是起重机拖动位能性负载,在放下重物时,电动机按反转方向接通电源,如图4-37a所示。此时电动机定子旋转磁场反转,但电动机转速因机械惯性来不及变化,从图4-37b的相应机械特性曲线可见,电动机的工作点从a′点平移至曲线1的b点,在第二象限反接制动,转速逐渐降低。当工作点移至c点转速为零时,在电磁转矩TC与重力转矩TL的共同作用下,电动机反向起动,并在第三象限反向电动加速。电动机加速到同步转速-n1时,电磁转矩为零。但在重力转矩TL的作用下,电动机继续加速,并超过同步转速,工作点进入机械特性曲线的第四象限,这时电动机的电磁转矩成为制动转矩,电动机进入第四象限的反向回馈制动过程。当工作点移至a点时,电磁转矩Ta与重力转矩TL相等,电动机以稳定速度下放重物,处于稳定反向回馈制动运行状态。
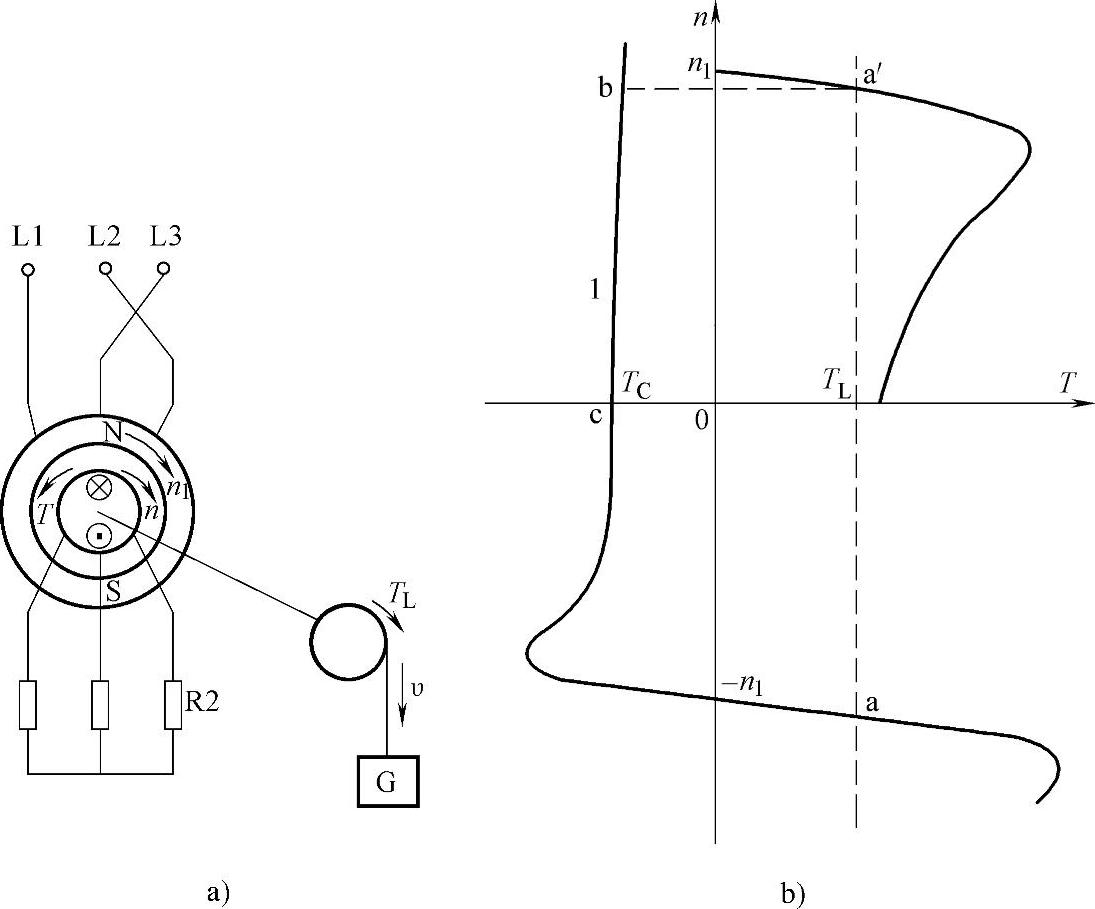
图4-37 三相异步电动机反向回馈制动
a)原理图 b)机械特性曲线
另一种发生回馈制动的情况发生在电动机变极或变频调速过程中。电动机的转速由高速挡切换到低速挡,同步转速也由n1降低为n1′(见图4-38),这时电动机的工作点由曲线1的a点平移至曲线2的b点,进入正向回馈制动状态,转速逐渐降低,当转速n等于调速后新的同步转速n1′时,电磁转矩为零,但在负载转矩TL的作用下转速继续下降,从n1′到c点为电动状态减速过程。工作点到达c点时,电磁转矩Tc与负载转矩TL相等,电动机在nc转速下稳定运行。电动机转速从工作点b点的nb降为n′1的过程(工作点在第二象限)为正向回馈制动。
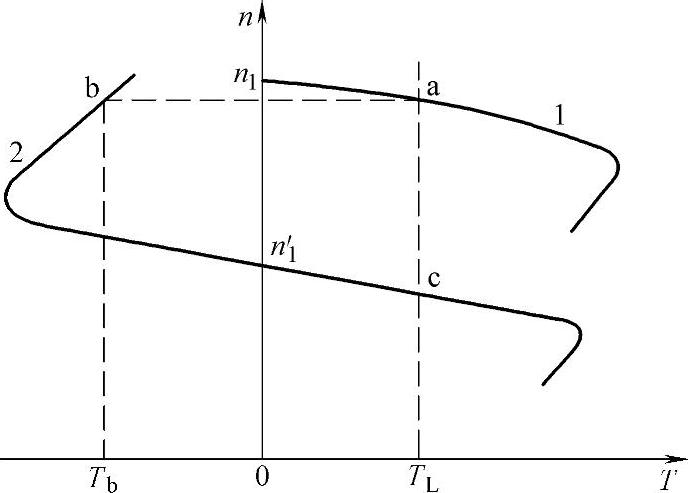
图4-38 三相异步电动机的正向回馈制动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。