



三相绕线转子异步电动机转子回路串电阻减压起动方法是在起动时,在三相转子电路中串接起动电阻,使加到转子绕组的起动电压降低,起动结束后再将电阻短接,使电动机在全电压下运行。显然,这种方法会消耗大量的电能,且装置成本较高,一般仅在一些特殊应用场合下使用,如起重机械、抓斗机等。图4-21(方案1)是一种转子回路串接电阻的起动控制线路,它是通过欠电流继电器的释放值设定进行控制的,利用电动机起动过程中,转子电流大小的变化来控制电阻的分段切除的方法。
图4-21中,在起动前,起动电阻全部接入电路,在起动过程中,起动电阻被逐段地短接。电阻的短接是采用三只欠电流继电器KA1、KA2、KA3和三只接触器K2、K3、K4的相互配合来完成的。正常运行时,线路中只有接触器K1、K4长期运行,欠电流继电器KA1、KA2、KA3的线圈被接触器K4短接,接触器K2、K3的线圈分别被接触器K3、K4的常闭触头断开。这样一方面可减少耗电,另一方面可延长使用寿命。
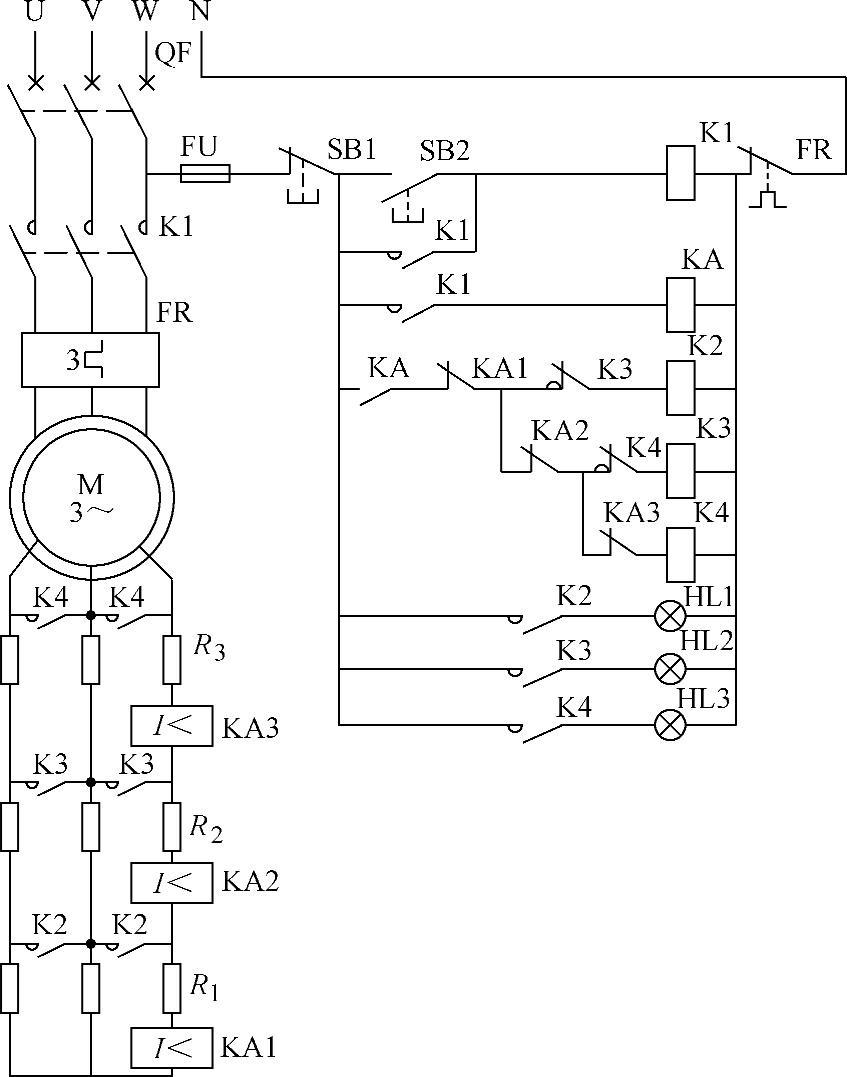
图4-21 转子电路串电阻减压起动控制线路(方案1)
欠电流继电器KA1、KA2、KA3的线圈分别串接在电动机转子回路中。这三个欠电流继电器的吸合电流都一样,但释放电流不一样。其中,KA1的释放电流最大,KA2次之,KA3最小。电动机刚起动时,起动电流很大,KA1、KA2、KA3都吸合,它们的常闭触头断开,接触器K2、K3、K4不动作,全部电阻被接入电动机转子回路中。当电动机转速升高后,电流减小,KA1首先释放,它的常闭触头KA1复位闭合,使接触器K2线圈得电,主触头短接第一段转子电阻R1,这时电动机转子电流增加,随着转速升高,电流逐渐下降,使KA2释放,它的常闭触头KA2复位闭合,接触器K3线圈得电,主触头短接第二段起动电阻R2。同时利用其常闭辅助触头K3将接触器K2线圈断电退出运行,这时电动机转子电流又增加,随着转速继续升高,电流进一步逐渐下降,使KA3释放,它的常闭触头KA3复位闭合,接触器K4线圈得电,转子串联电阻全部被短接,同时利用其常闭辅助触头K4将接触器K3线圈断电退出运行,电动机起动完毕。
起动电阻的分段数量是根据不同要求确定的,可以是n段,短接起动过程如上述一样。而短接的方式有三相电阻不平衡短接法和三相电阻平衡短接法两种,所谓不平衡短接是每相的起动电阻轮流被短接,而平衡短接是三相的起动电阻同时被短接。但无论采用不平衡或平衡短接法,其作用基本相同。不平衡短接方法通常采用凸轮控制器,由于凸轮控制器中各对触头闭合顺序按不平衡短接法设计,这样使得控制电路相对简单。平衡短接法就是采用接触器短接的方法。
如果在起动过程中,采用三只时间继电器KT1、KT2、KT3和三只接触器K2、K3、K4的相互配合来完成起动电阻的短接,只要根据需要设定三只时间继电器的定时时间满足t1<t2<t3即可。线路的动作规律与方案1相同。同样,正常运行时,线路中只有K1、K4长期通电,KT1、KT2、KT3、KM2、KM3在完成控制任务后相继退出运行。如图4-22(方案2)所示。(https://www.xing528.com)
图4-22中,在起动前,起动电阻全部接入电路,在起动过程中,按照3个时间继电器的定时值逐段将起动电阻短接切除。接触器K2、K3、K4的常闭触头控制时间继电器KT1的线圈,KT1的延时闭合触头控制接触器K2的线圈,接触器K2的常开触头控制时间继电器KT2的线圈,KT2的延时闭合触头控制接触器K3的线圈,接触器K3的常开触头控制时间继电器KT3的线圈,KT3的延时闭合触头控制接触器K4的线圈。
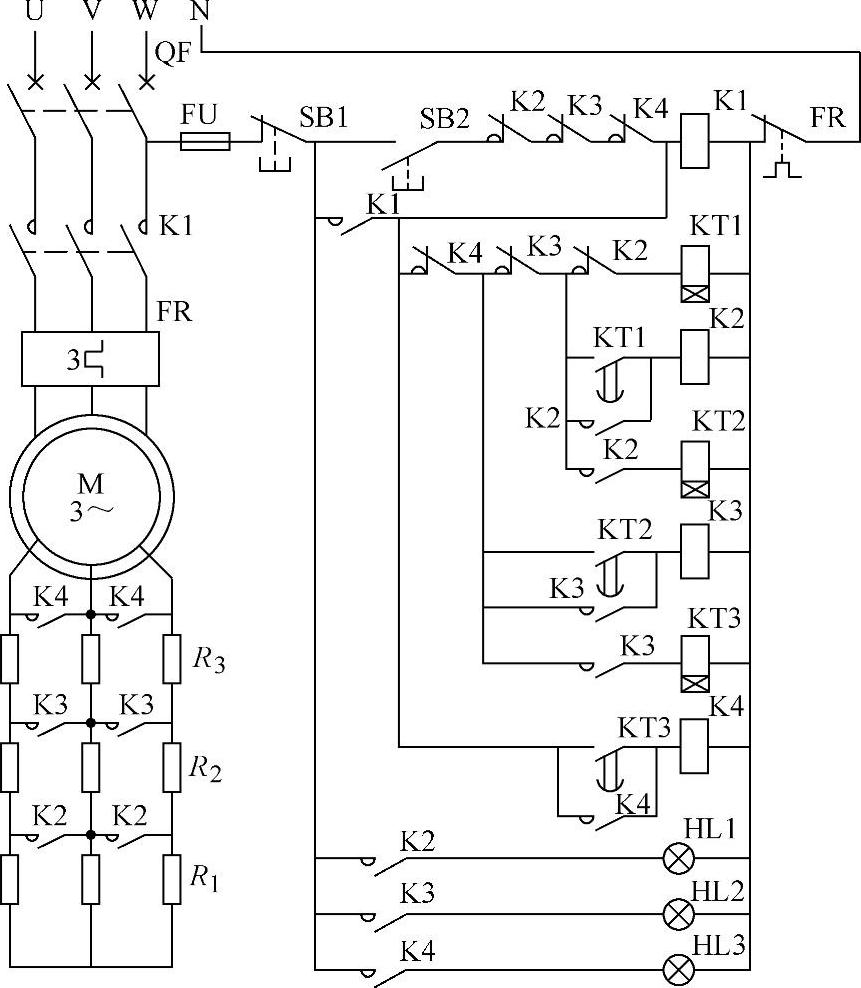
图4-22 转子电路串电阻减压起动控制线路(方案2)
减压起动时,按下起动按钮SB2,如果接触器K2、K3、K4处于原始状态,则起动,接触器K1的常开触头自锁,主触头闭合,电动机开始降压运行,同时,控制回路中的接触器K2、K3、K4常闭触头串联回路使KT1得电,当电动机转速升高后,KT1定时到,KT1的延时闭合触头控制接触器K2的线圈得电吸合,K2的主触头将第一段转子电阻R1短接,同时,接触器K2的一个常闭触头断开时间继电器KT1的线圈电源使其退出运行,并使时间继电器KT2的线圈得电。当KT2定时到,KT2的延时闭合触头控制接触器K3的线圈得电吸合,K3的主触头将第二段转子电阻R2短接,同时,接触器K3的一个常闭触头断开时间继电器KT2的线圈电源使其退出运行,并使时间继电器KT3的线圈得电。当KT3定时到,KT3的延时闭合触头控制接触器K4的线圈得电吸合,K4的主触头将第三段转子电阻R3短接,此时转子串联电阻全部被短接,同时,接触器K4的一个常闭触头断开时间继电器KT3的线圈电源使其退出运行,并自锁时间继电器KT3的延时闭合触头,电动机起动完毕,投入正常运行。
图4-21、图4-22所示的控制线路的控制方法和思路可以推广应用到多电机顺序控制场合,两图实质上是一种顺序控制方法和思路,图4-21是按照电流大小顺序控制,而图4-22是按延时长短顺序控制。因此,我们可以假设将3段电阻视为3台电动机,则图4-21、图4-22的控制部分可构成4台电动机的顺序控制电路。请读者自行画出主电路并分析。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。