



下面分别介绍力反馈式电液伺服阀和位置反馈式伺服阀的工作原理。
1.喷嘴挡板式力反馈式电液伺服阀
喷嘴挡板力反馈式电液伺服阀由电磁和液压两部分组成,电磁部分是一个动铁式力矩电动机,液压部分为两级。第一级是双喷嘴挡板阀,称前置级(先导级);第二级是四边滑阀,称功率放大级(主阀)。
由双喷嘴挡板阀构成的前置级如图7-3-3所示,它由两个固定节流孔、两个喷嘴和一个挡板组成。两个对称配置的喷嘴共用一个挡板,挡板和喷嘴之间形成可变节流口,挡板一般由扭轴或弹簧支撑,且可绕支点偏转,挡板由力矩电动机驱动。当挡板上没有作用输入信号时,挡板处于中间位置——零位,与两喷嘴之距均为x0,此时两喷嘴控制腔的压力P1与P2相等。当挡板转动时,两个控制腔的压力一边升高,另一边降低,就有负载压力PL(PL=P1-P2)输出。双喷嘴挡板阀有四个通道(一个供油口、一个回油口和两个负载口),有四个节流口(两个固定节流孔和两个可变节流孔),是一种全桥结构。
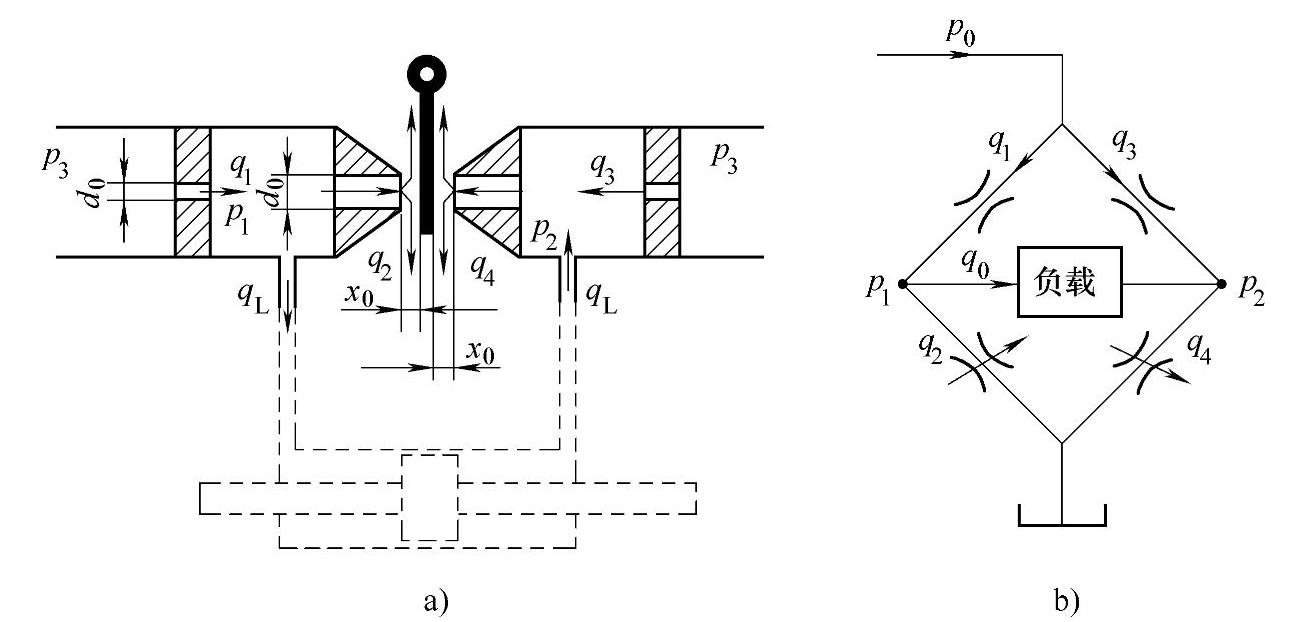
图7-3-3 由双喷嘴挡板阀构成的前置级
a)结构图 b)等效原理图
力反馈型喷嘴挡板式电液伺服阀的工作原理如图7-3-4所示。主阀心两端容腔可看成是驱动主滑阀的对称油缸,由先导级的双喷嘴挡板阀控制。挡板5的下部延伸一个反馈弹簧杆11,并通过一钢球与滑阀9相连。主阀位移通过反馈弹簧杆转化为弹性变形力作用在挡板上与电磁力矩相平衡(即力矩比较)。当线圈13中没有电流通过时,力矩电动机无力矩输出,挡板5处于两喷嘴中间位置。当线圈通入电流后,衔铁3因受到电磁力矩的作用偏转角度θ,由于衔铁固定在弹簧管12上,这时,弹簧管上的挡板也偏转相应的θ角,使挡板与两喷嘴的间隙改变,如果右面间隙增加,左喷嘴腔内压力升高,右腔压力降低,滑阀9(滑阀心)在此压差作用下右移。由于挡板的下端是反馈弹簧杆11,反馈弹簧杆下端是球头,球头嵌放在滑阀9的凹槽内,在阀心移动的同时,球头通过反馈弹簧杆带动上部的挡板一起向右移动,使右喷嘴与挡板的间隙逐渐减小。当作用在衔铁—挡板组件上电磁力矩与作用在挡板下端因球头移动而产生的反馈弹簧杆变形力矩(反馈力)达到平衡时,滑阀便不再移动,并使其阀口一直保持在这一开度上。该阀通过反馈弹簧杆的变形将主阀心位移反馈到衔铁—挡板组件上与电磁力矩进行比较而构成反馈,故称力反馈式电液伺服阀。
通过线圈的控制电流越大,使衔铁偏转的转矩、挡板挠曲变形、滑阀两端的压差以及滑阀的位移量越大,伺服阀输出的流量也就越大。由于采用了力反馈,力矩电动机基本上在零位附近工作,只要求其输出电磁力矩与输入电流成正比(不像位置反馈中要求力矩电动机衔铁位移和输入电流成正比),因此线性度易于实现。另外滑阀的位移量在电磁力矩一定的情况下,决定于反馈弹簧的刚度,滑阀位移量便于调节,这给设计带来了方便。
采用了衔铁式力矩电动机和喷嘴挡板使伺服阀结构极为紧凑,并且动特性好。但这种伺服阀工艺要求高,造价高,对于油的过滤准确度的要求也较高。所以这种伺服阀适用于要求结构紧凑、动特性好的场合。力反馈式电液伺服阀框图如图7-3-5所示。
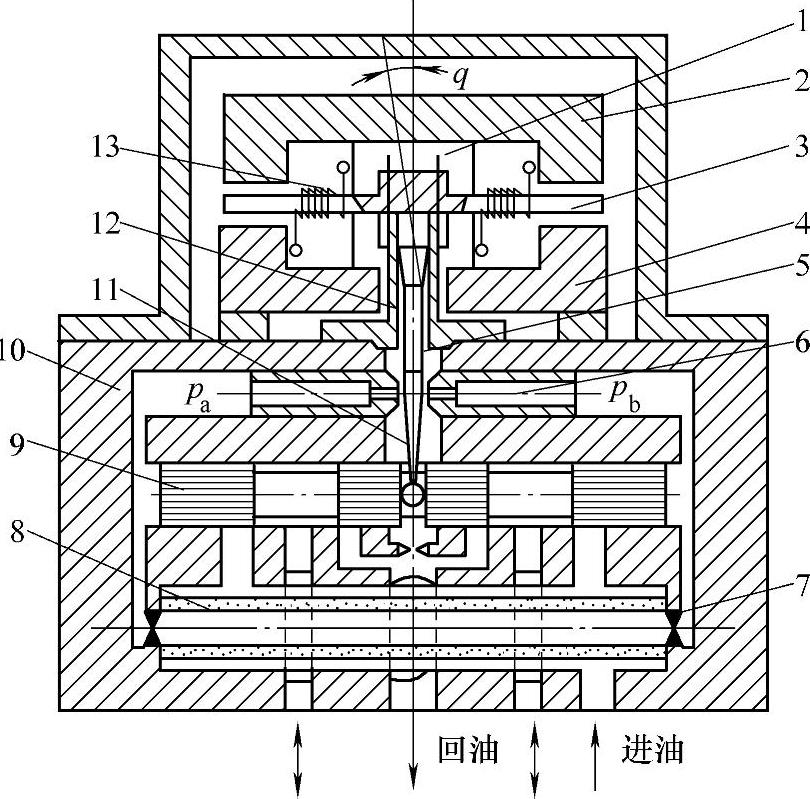
图7-3-4 喷嘴挡板式电液伺服阀
1—永久磁铁 2、4—导磁体 3—衔铁 5—挡板 6—喷嘴 7—固定节流孔 8—滤油器 9—滑阀 10—阀体 11—反馈弹簧杆 12—弹簧管 13—线圈
2.位置反馈式伺服阀
该类型电液伺服阀为二级滑阀式位置反馈伺服阀结构。由电磁部分、控制滑阀和主滑阀组成。直接位置反馈型电液伺服阀的主阀心与导阀心构成直接位置比较和反馈,其工作原理如图7-3-6所示。

图7-3-5 力反馈式电液伺服阀框图
图中先导阀直径较小,直接由动圈式力电动机的线圈驱动,力电动机的输入电流约为0~±300mA。当输入电流I=0时,力电动机线圈的驱动力Fi=0,导阀心位于主阀零位没有运动;当输入电流逐步加大到I=300mA时,力电动机线圈的驱动力也逐步加大到约为40N,压缩力电动机弹簧后,使导阀心产生位移约为4mm;当输入电流改变方向,I=-300mA时,力电动机线圈的驱动力也变成约-40N,带动导阀心产生反向位移约-4mm。上述过程说明导阀心的位移x心与输入电流I成比例,运动方向与电流方向保持一致。导阀心直径小,无法控制系统中的大流量;主阀心的阻力很大,力电动机的推力又不足以驱动主阀心。解决的办法是,先用力电动机比例地驱动直径小的导阀心,再用位置随动(直接位置反馈)的办法让主阀心等量跟随先导阀运动,最后达到用小信号比例地控制系统中的大流量之目的。
设计时,将主阀心两端容腔看成为驱动主阀心的对称双作用液压缸,该缸由先导阀供油,以控制主阀心上下运动。由于导阀心直径小,加工困难,为了降低加工难度,可将先导阀上用于控制主阀心上下两腔的进油阀口由两个固定节流孔代替,这样先导阀可看成是由两个带固定节流孔的半桥组成的全桥。为了实现直接位置反馈,将主阀心、驱动油缸、先导阀阀套三者做成一体,因此主阀心位移xP(被控位移)反馈到导阀上,与先导阀套位移x套相等。当导阀心在力电动机的驱动下向上运动产生位移x心时,导阀心与阀套之间产生开口量x心-x套,主阀心上腔的回油口打开,压差驱动主阀心自下而上运动,同时导阀口在反馈的作用下逐步关小。当导阀口关闭时,主阀停止运动且主阀位移xP=x套=x心。反向运动亦然。在这种反馈中,主阀心等量跟随先导阀运动,故称为直接位置反馈。
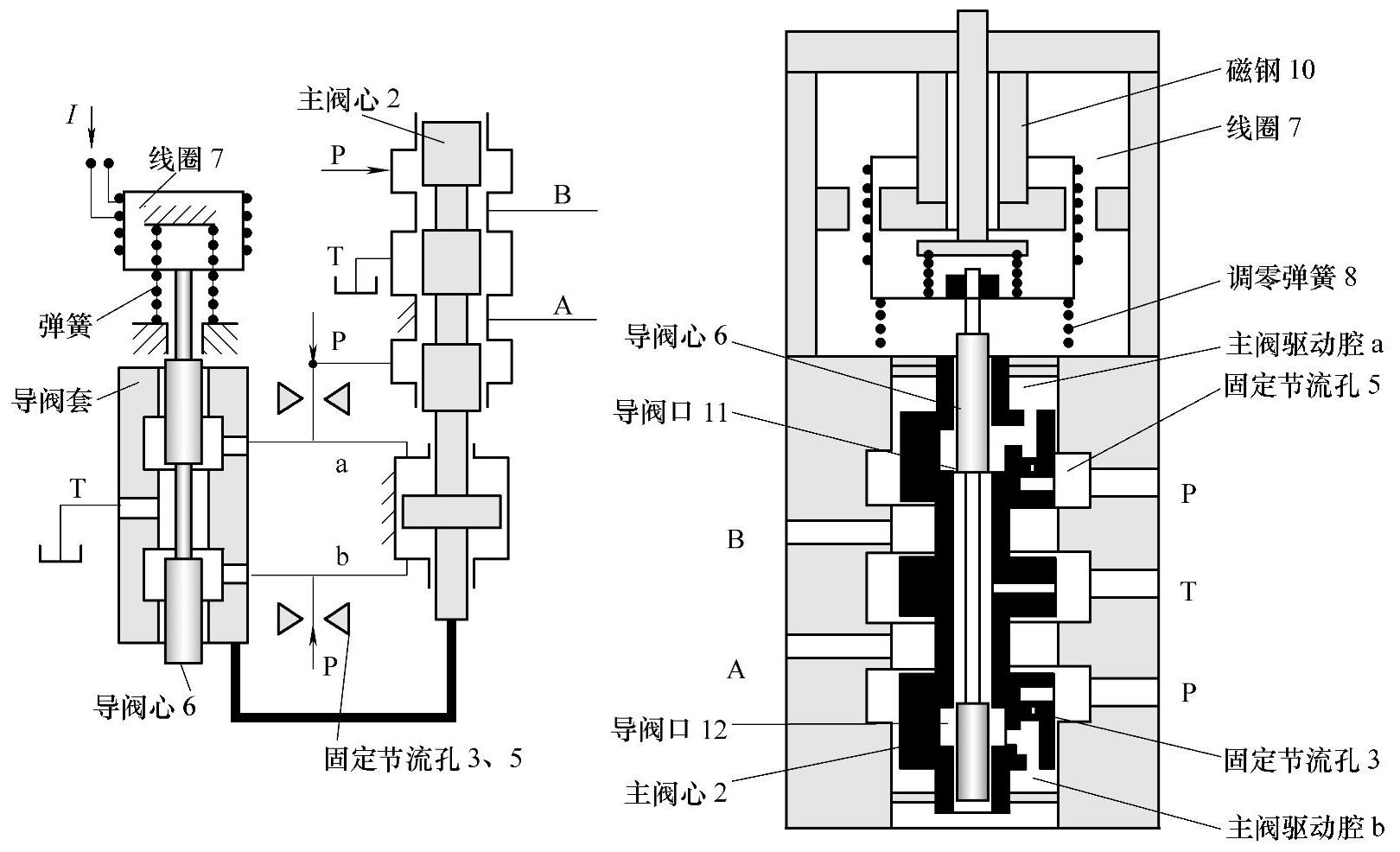
图7-3-6 直接位置反馈型电液伺服阀的工作原理图
图7-3-7a是DY系列直接位置反馈型电液伺服阀的结构图。上部为动圈式力电动机,下部是两级滑阀装置。压力油由P口进入,A、B口接执行元件,T口回油。由动圈7带动的小滑阀6与空心主滑阀4的内孔配合,动圈与先导滑阀固连,并用两个弹簧8、9定位对中。小滑阀上的两条控制边与主滑阀上两个横向孔形成两个可变节流口11、12。P口来的压力油除经主控油路外,还经过固定节流口3、5和可变节流口11、12,先导阀的环形槽和主滑阀中部的横向孔到了回油口,形成如图7-3-7b所示的前置液压放大器油路(桥路)。显然,前置级液压放大器是由具有两个可变节流口11、12的先导滑阀和两个固定节流口3、5组合而成的。桥路中固定节流口与可变节流口连接的节点a、b分别与主滑阀上、下两个台肩端面连通,主滑阀可在节点压力作用下运动。平衡位置时,节点a、b的压力相同,主滑阀保持不动。如果先导滑阀在动圈作用下向上运动,节流口11加大,12减小,a点压力降低,b点压力上升,主滑阀随之向上运动。由于主滑阀又兼作先导滑阀的阀套(位置反馈),故当主滑阀向上移动的距离与先导滑阀一致时,停止运动。同样,在先导滑阀向下运动时,主滑阀也随之向下移动相同的距离。故为直接位置反馈系统。这种情况下,动圈只需带动小滑阀,力电动机的结构尺寸就不至于太大。
以滑阀作前置级的优点是功率放大系数大,适合于大流量控制。其缺点是滑阀阀心受力较多、较大,因此要求驱动力大;由于摩擦力大,使分辨率和滞环增大;因运动部分质量大,动态响应慢;公差要求严,制造成本高。
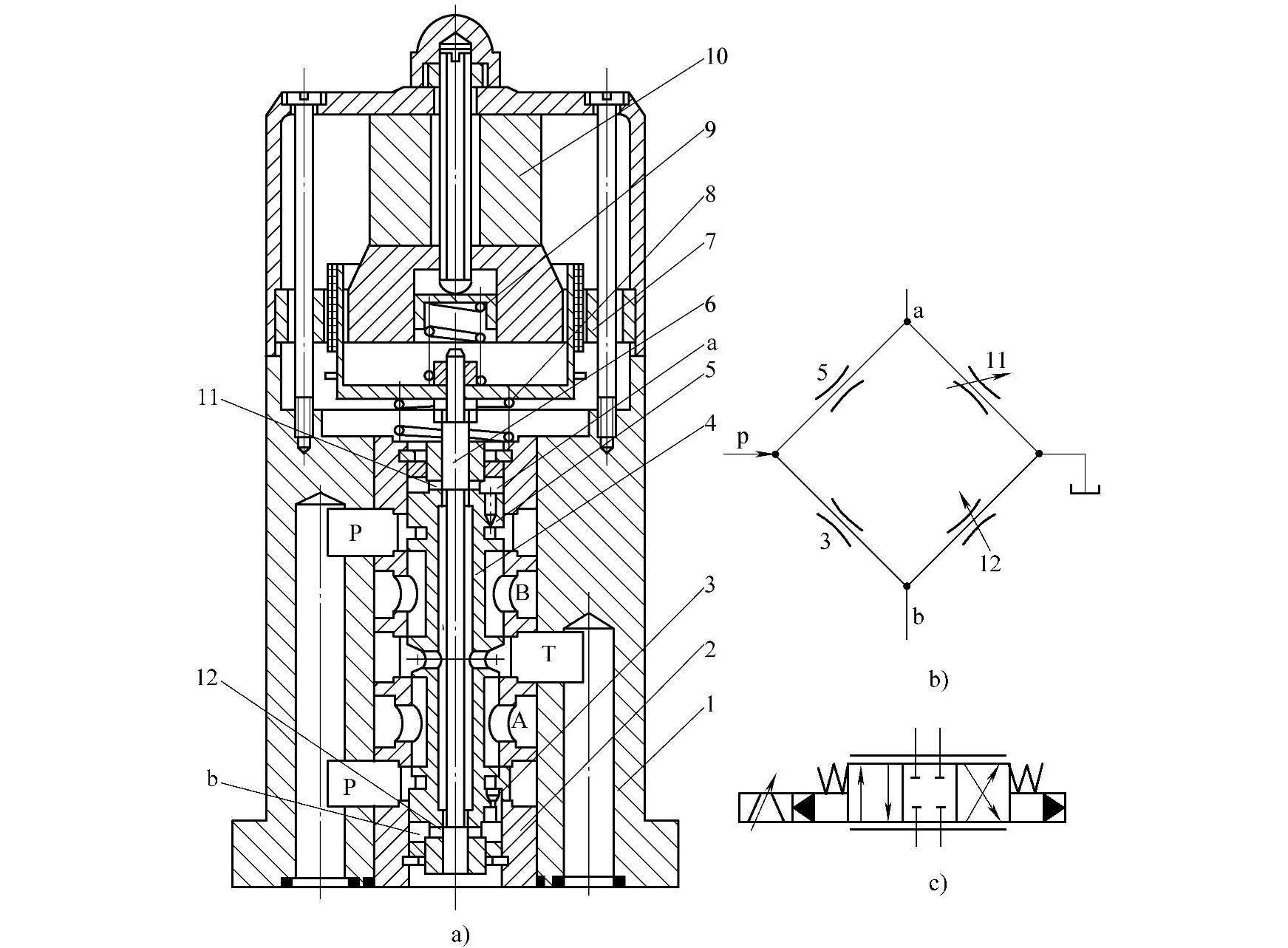
图7-3-7 DY型电液伺服阀
a)结构图 b)前置级液压放大器油路 c)电液伺服阀符号 1—阀体 2—阀座 3、5—固定节流口 4—主滑阀 6—先导阀 7—线圈(动圈) 8—下弹簧 9—上弹簧 10—磁钢(永久磁铁) 11、12—可变节流口
上述工作过程中,动圈的位移量,一级阀心(导阀心)的位移量与主阀心的位移量均相等。因动圈的位移量与输入信号电流成正比,所以输出的流量和输入信号电流成正比。
二级滑阀型位置反馈式伺服阀的框图如图7-3-8所示。

图7-3-8 位置反馈式电液伺服阀框图(https://www.xing528.com)
这种电液伺服阀具有结构简单、工作可靠、容易维护、可在现场进行调整、对油液清洁度要求不太高的优点。
3.电液伺服阀的基本特性
(1)输入电流—输出流量特性
空载时输出流量和输入信号电流之间的关系,常用空载流量特性曲线来表示,如图7-3-9所示。
由这一曲线可得到该阀的额定值、线性度、滞环、流量增益等特性。
1)额定电流IR——在这一电流范围内,阀的输出流量与输入信号电流成正比。
2)额定空载流量——在额定压力与额定电流下阀的空载流量。
3)线性度——q—I曲线直线性的度量。
4)滞环——主要用来表明信号电流改变方向时,由摩擦力、磁滞等原因使I—q曲线不重合的程度。常以曲线上同一流量下电流最大差值ΔImax与阀的额定电流IR之比来表示。
5)流量增益——qL与I之比值,即q—I曲线的平均斜率。
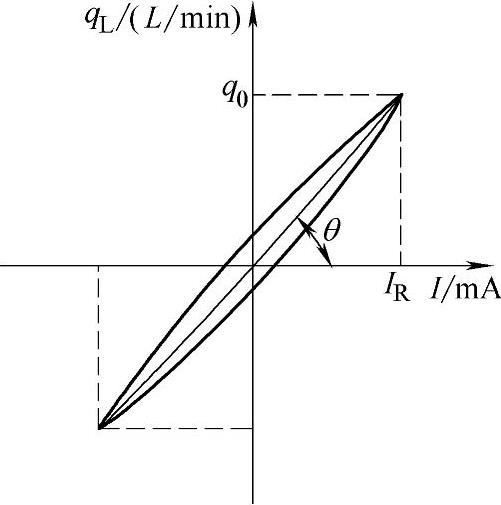
图7-3-9 空载流量特性曲线
IR—额定电流q0—最大空载流量tanθ—流量增益
(2)压力增益特性
在一定供油压力下,在输入电流I和负载压力pL=p1-p2曲线上,比值ΔpL/ΔI称为压力增益。当负载流量保持为零时,在零位(中间平衡位置)附近的压力增益称为零位压力增益。零位压力增益与主滑阀的开口形式有关,以零开口形式最高。提高供油压力ps也可提高零位压力增益。但这一特性主要与阀的制造质量有关。提高零位压力增益,对于减小不灵敏区、提高准确度有作用,但对稳定性起相反的作用。图7-3-10是零开口伺服阀的零位压力增益特性曲线。
(3)负载压力、流量特性
这一特性往往是选用伺服阀的主要依据。图7-3-11为负载压力—流量特性曲线。
(4)对数频率特性
它表示电液伺服阀的动态特性。幅频曲线中-3dB时频率为该阀的频宽。其值越大则该阀的工作频率范围越大。对数频率特性也是分析伺服系统动特性以及设计、综合电液伺服系统的依据。图7-3-12为阀的对数频率特性曲线。
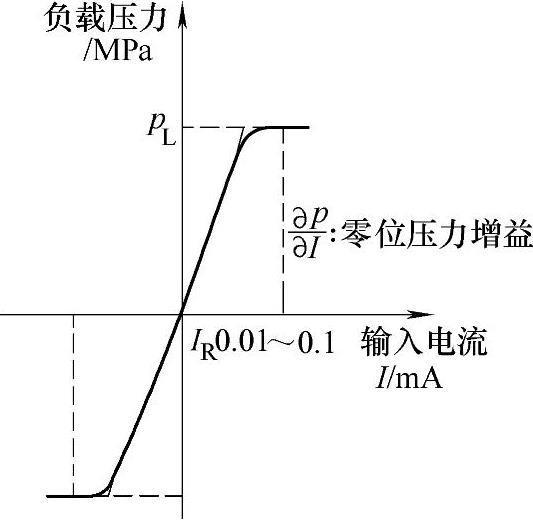
图7-3-10 零位压力增益特性曲线
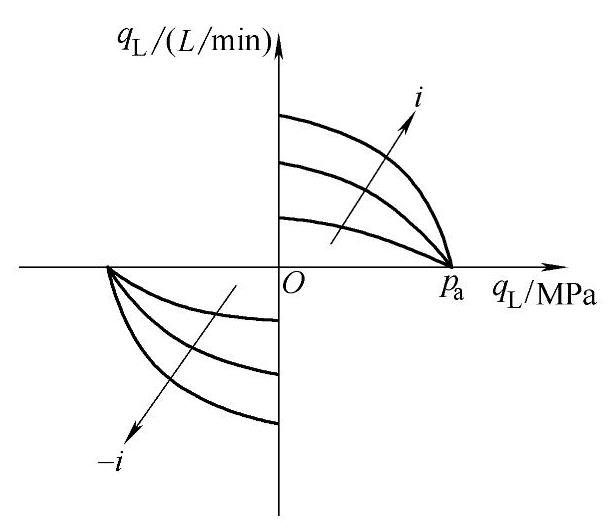
图7-3-11 负载压力—流量特性曲线

图7-3-12 对数频率特性曲线
(5)零漂与零偏
伺服阀由于供油压力的变化和工作油温度的变化而引起的零位(QL=pL=0的几何位置)变化称为零漂。零漂一般用使其恢复零位所需加的电流值与额定电流值之比来衡量。这一比值越小越好。另外,由于制造、调整、装配的差别,控制线圈中不加电流时,滑阀不一定位于中位。有时必须加一定的电流才能使其恢复中位(零位)。这一现象称为零偏。零偏以使阀恢复零位所需加之电流值与额定电流值之比来衡量。
(6)不灵敏度
由于不灵敏区的存在,伺服阀只有在输入信号电流达一定值时才会改变状态。使伺服阀发生状态变化的最小电流与额定电流之比称为不灵敏度。其值愈小愈好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。