



变桨距系统需要参照风力发电机组主控系统给定的信号精确地控制叶片的桨距角(叶片的相对位置)。每个叶片独立的位置控制系统能提高了变桨距系统的安全性和准确性。
1.变桨距位置控制系统的构成
变桨距位置控制系统包括变频器、控制器(或置于变频器内部)、变桨距电机、编码器和冗余叶片位置传感器。在叶片受到强大外部载荷的情况下,通过实时的叶片桨距角反馈和变桨距电动机转速控制组成了闭环控制系统,其结构图如图10-8所示。
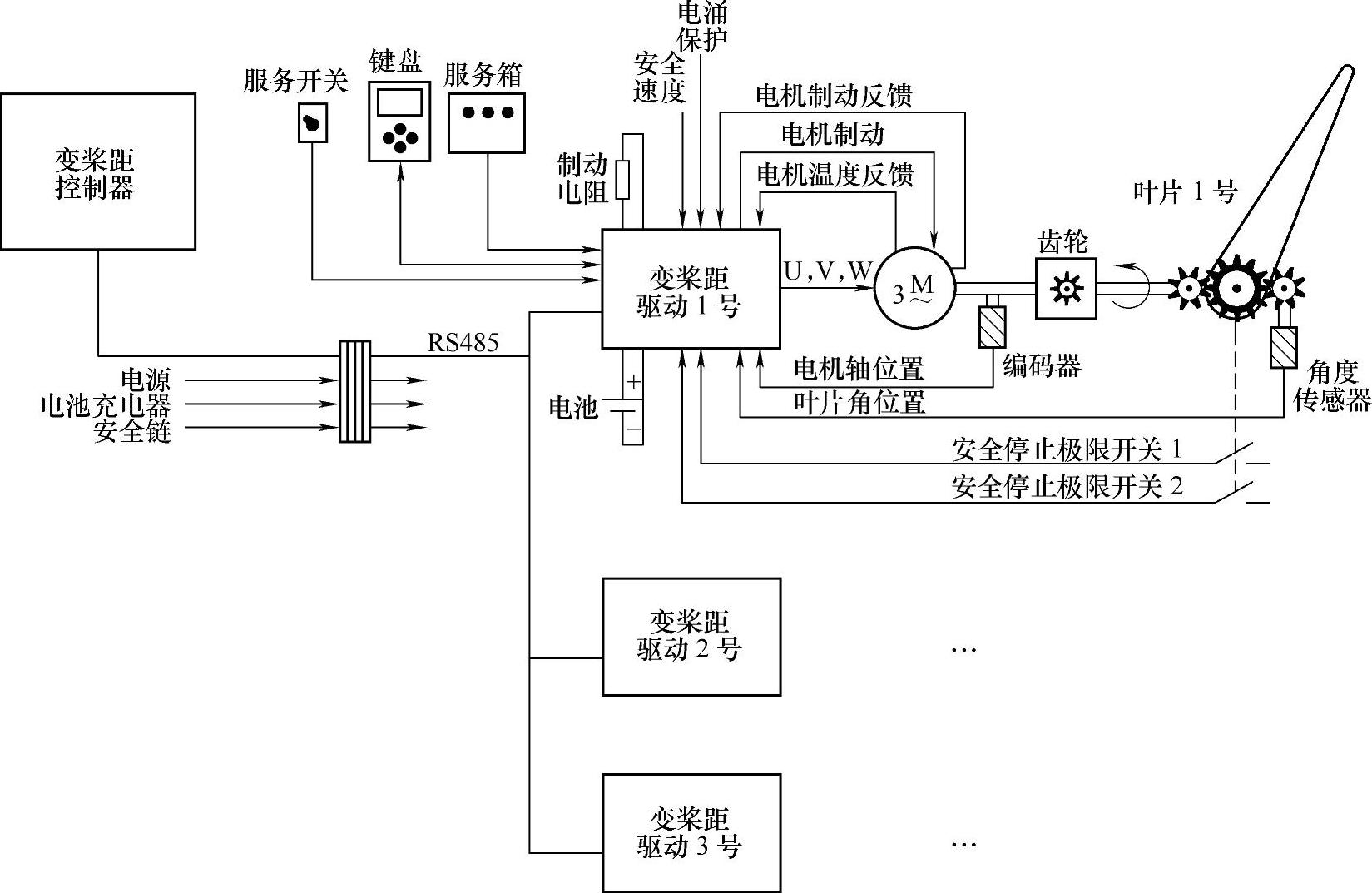
图10-8 电动变桨距位置控制机构
(1)角度测量
PID(比例积分微分)控制回路需要输入在叶片上测量出的当前角度信号(见图10-8)。这可以从两个来源获得,或者从角度传感器,或者基于译码器脉冲的计算。使用基于角度的译码器可获得一个高精度相关角度,这个选择可通过键盘来设定,但是如果转换器/译码器或齿轮失效,这个选择将被驳回。
为了降低角度转换器的噪声,角度转换器的信号可以经过滤波器,滤波器可根据需要开启和关闭,它的强度适合范围是0~99%,非常重要的一点是滤波器仅仅应用于稳定时期,当叶片的角度改变时,滤波器不起任何作用,过滤器对PID控制回路也不起作用,PID的参数和过滤器可以独立的进行调整。
(2)限位开关
确切范围取决于每种风力机对MDS控制器的压力校准和极限开关的机械定位。当叶片达到它的使用范围时,机械限制开关将被起动。这可确保不会发生俯仰角超出限度。限位开关的布局位置如图10-9所示,安装效果如图10-10所示。
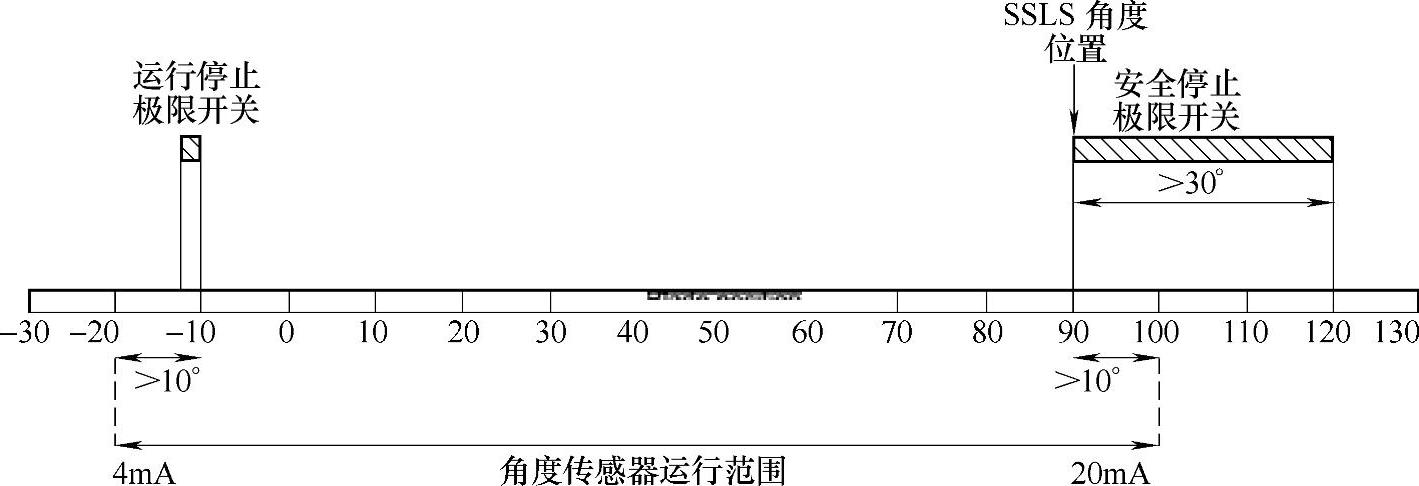
图10-9 限位开关位置示意图
2.通信设计
在变桨距系统运行过程中,变桨距控制器、变频器之间需要实时通信以交换控制信息、实时状态等数据。变桨距系统的通信设计是变桨距系统设计的重要部分。
变桨距控制器以通信方式从风力发电机组主控制器获得控制信号,并和所有的变桨距驱动变频器实时交换数据,以保证变桨距系统及时准确地跟踪主控的变桨距信号,一旦某一个变桨距变频器发现通信中断(规定的时间内不能正确收到数据包),将立即使叶片向安全位置(约90°)移动,这将有效地使风轮停止下来。与此同时变桨距系统控制器将系统置于安全模式,通知所有其他变桨距变频器使各叶片向安全位置移动。
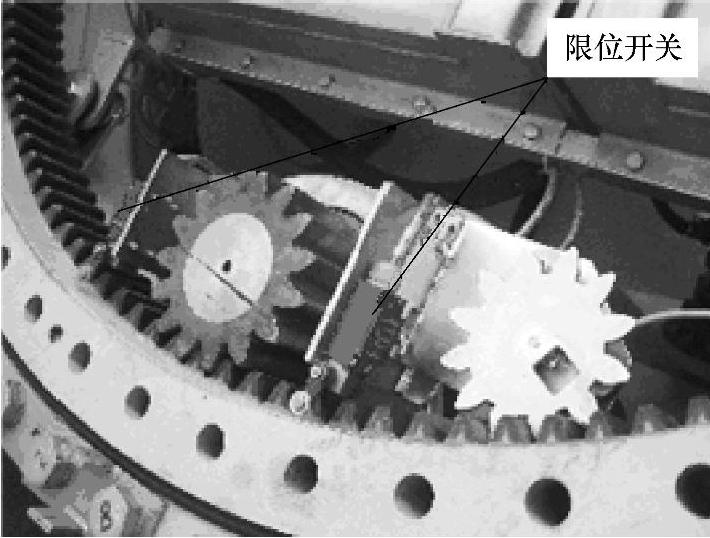
图10-10 限位开关安装效果图
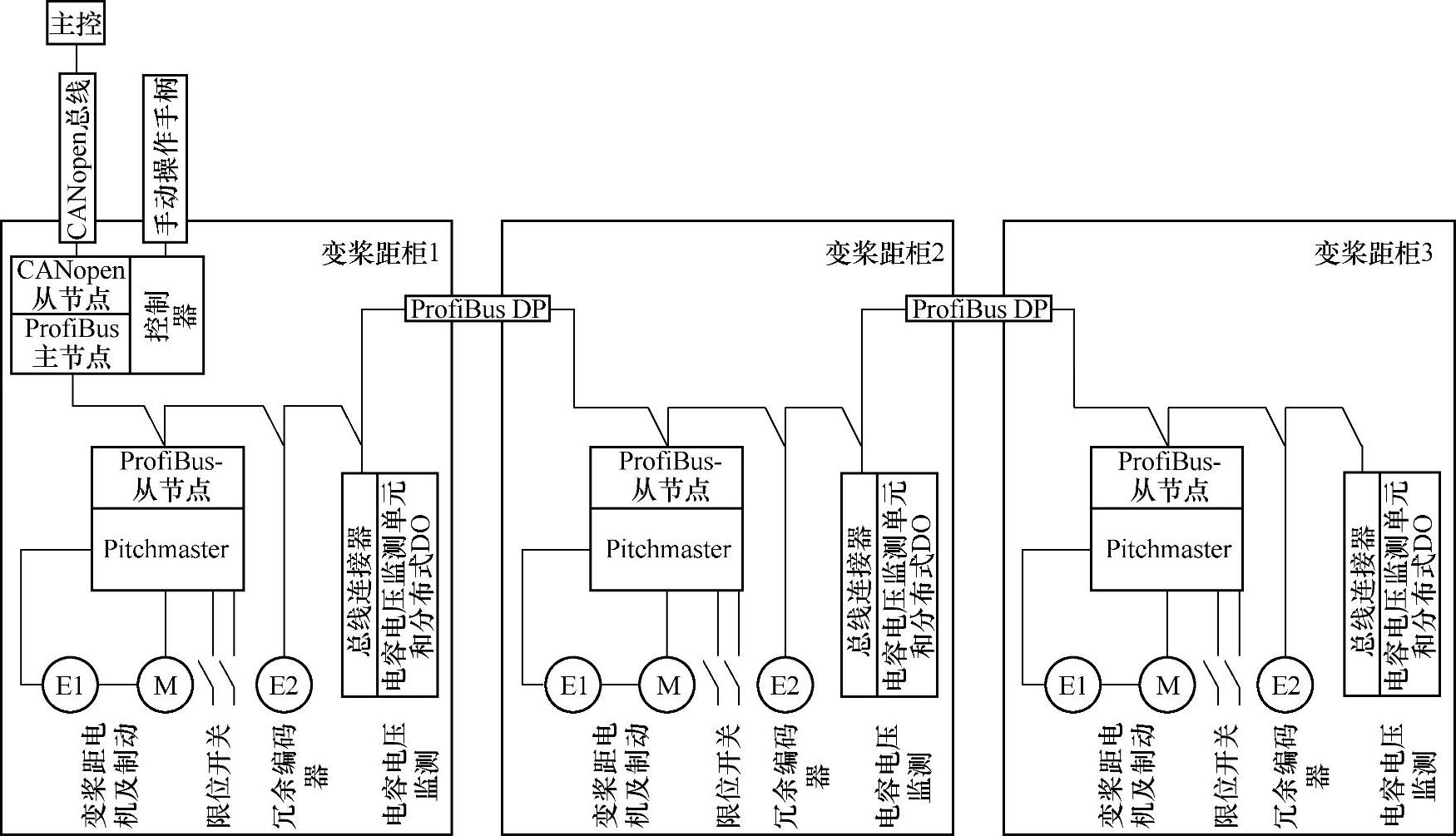
图10-11 电动变桨距系统通信结构
(1)变桨距控制器和主控通信
变桨距系统的通信接口,主要用于实现与主控系统的通信,接口一般采用CANopen或者ProfiBus现场总线方式。下面以CANopen总线为例说明变桨距控制器通信接口机线缆的要求。
1)通信物理接口要求
①通信信号线应采用屏蔽双绞铜缆,插接头应带屏蔽外壳,通信线两端屏蔽层应连接到外壳并接地。
②在总线的两个末端应接120Ω末端电阻,阻止信号反射。
③通信接口应考虑集电环运动对通信可靠性的影响并进行必要的测试,同时设计时对每根通信线应采用滑环双线接入,构成冗余。(https://www.xing528.com)
④CANopen物理线路采用RS-485,通信线应包括CANH、CANL、GND,总线长度与波特率设置应满足表10-4的规定,其他要求应满足ISO 11898—2003的规定。
表10-4 通信线长与波特率要求

2)与主控系统交互信息要求:
①主控发送至变桨距:叶片的角度设定值或叶片的调节速度;
②主控系统的控制命令,包括心跳、故障复位、模式设定等;
③变桨距反馈回主控的信息,包括3个叶片的当前角度值,3个叶片冗余传感器的当前角度值,3个叶片的当前调节速度,3个叶片的当前调节加速度,3个电动机的转矩/电流,电动机的温度,所有柜体的温度及轮毂温度,系统状态信息。
(2)变桨距控制器和变桨距驱动变频器通信
为了提高安全性,在变桨距系统中变桨距控制器和变桨距驱动变频器的通信采用独立的总线进行,在该总线上可以包括变桨距控制器、三个变桨距驱动变频器,每个设备分配不同的站点号。通信回路可以实时读取变桨距驱动变频器的运行状态数据并给定控制目标,当故障发生时还可以去读变频器的故障信息。具体通信内容根据不同的驱动变频器差异较大。
3.各操作模式下的控制
一般变桨距系统有手动模式、自动模式和安全停止模式。手动模式主要为机组和变桨距系统调试设置,叶片位置、变桨距电动机速度和方向通过人机交互装置手动确定。在自动模式下,变桨距系统根据主控系统给定的目标控制变桨距电动机来调节叶片位置。
(1)手动模式
在人工模式下,变桨距控制器的速度和位置控制目标来自键盘和服务终端,在手动模式下不会进入安全速度模式。如果已处在安全速度,当转变为人工模式时它将停止。任何错误都可使电动机停止在安全状态下。
(2)自动模式
在自动模式下,Pitch Master有两种方法控制MDS控制器,在“Fieldbus Broadcast Posi-tion”模式下,MDS控制器使用设置点向所有节点发出信号,在“Fieldbus Individual Posi-tion”模式下,MDS控制器只向某一节点发出信号。
(3)安全模式
在人工模式下当叶片转动到安全停止的位置,MDS控制器将停止在安全模式下。在人工模式下,当有错误时MDS控制器将会转到安全模式。在安全停止状态下电动机经常停止。当所有错误都重新设置后才可继续运行。然而,在进入运行状态时,需要约200ms的时间来检查是否有错误。如果此时发现错误,MDS控制器将继续处在安全停止模式。
4.PID控制器
在变桨距系统中,桨距角一般根据主控系统给的控制目标采用PID控制器进行闭环控制。PID控制器的输入为桨距角的误差,桨距角误差可以通过来自主控的控制目标和测量所得的当前桨距角计算得到。PID控制器的输出为变桨距电动机的转速。控制器的结构如图10-12所示。
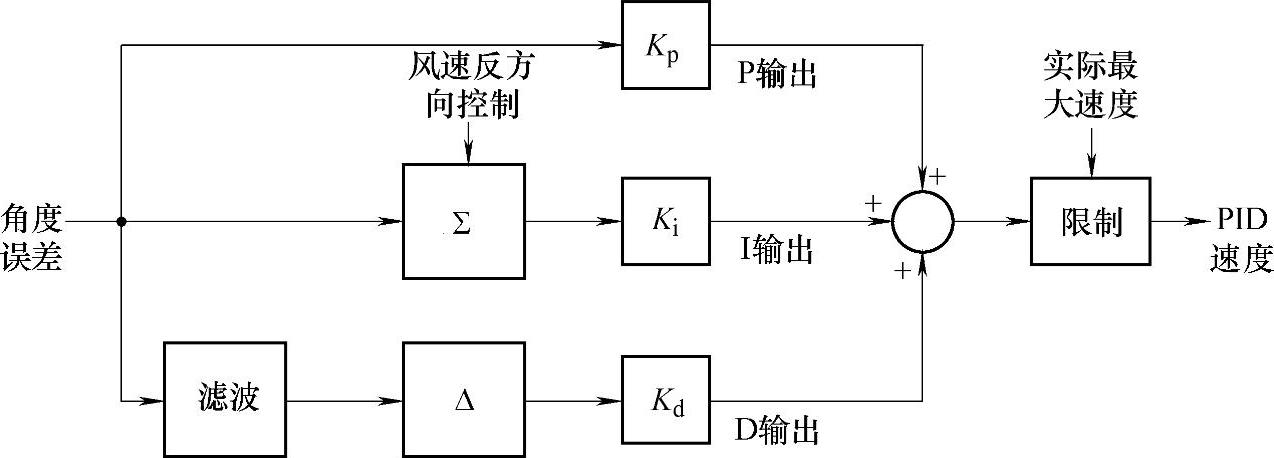
图10-12 变桨距位置PID控制器结构图
PID控制器运行中(无论自动还是手动),在叶片到达期望位置之后,机械制动起动,电动机停止。变桨距控制器持续监测桨距角目标值和实测桨距角误差,通过角度误差和误差时间来确定制动动作。在设定值变化没有超过设定的角度公差时,电动机制动始终保持抱闸状态。当上述任意条件不满足时,电动机制动立即松闸并启动位置控制。
在安全模式时,由于制动故障可能会导致电动机或齿轮锁死,并造成电动机过热。为了防止损坏电动机,变桨距控制器会暂停安全停止模式并停止电动机,避免变桨距电动机损坏,等到电动机温度低于设定值时再重起电机,驱动叶片至安全停机位置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。