



如图9-4所示,可以把整个基于RTAI+Linux的PET实时控制系统划分成硬件平台和软件平台两大部分:硬件平台主要由PC104+、PCL6045B运动控制卡、PCMUIO96 I/O卡以及控制扫描床的交流伺服电动机和控制棒源、隔板、摆动装置的步进电动机组成(虚线部分)。软件平台主要由RTAI,Linux kernel和Linux应用程序几部分组成(实线部分),下面把各个部分之间的关系归结如下[9]:
关系1表示实时任务如何与RTAI提供的实时任务接口相互作用。实时任务都是以Linux内核模块方式实现的,要实现一个实时任务,在模块初始化的时候要调用RTAI的任务创建函数初始化实时任务相关的数据和环境,指定定时器的运行模式(单触发模式或周期模式)并初始化定时器,然后开始执行任务;当没有加载任何RTAI的实时任务模块的时候,RTAI的任务调度和时钟中断都没有启动。关系2表示实时任务通过RTAI提供的管道(FIFO)和共享内存与Linux用户空间中的进程进行通信,通过这种方式,实时任务获取的实时数据就可以传递到用户空间让非实时进程对数据进行后续的处理。关系3表示RTAI本身的实现需要用到Linux内核提供的某些功能;例如,RTAI本身(包括各种提供给实时任务的服务模块)是以Linux内核驱动模块的形式存在的,这就需要用到Linux内核的动态内核模块加载功能;另外,RTAI目前的内存管理模块在初始化时是使用Linux的内存分配接口分配足够的内存。关系4表示传统的Linux内核和Linux用户程序的关系。关系5表示RTAI和底层硬件之间的交互,当外部事件触发了实时任务之后,实时任务在处理的过程中一般要对外部设备执行某些操作,例如控制采集卡进行数据采集、控制电动机等。关系6表示Linux和硬件平台之间的关系。PET控制系统执行过程如图9-5所示。
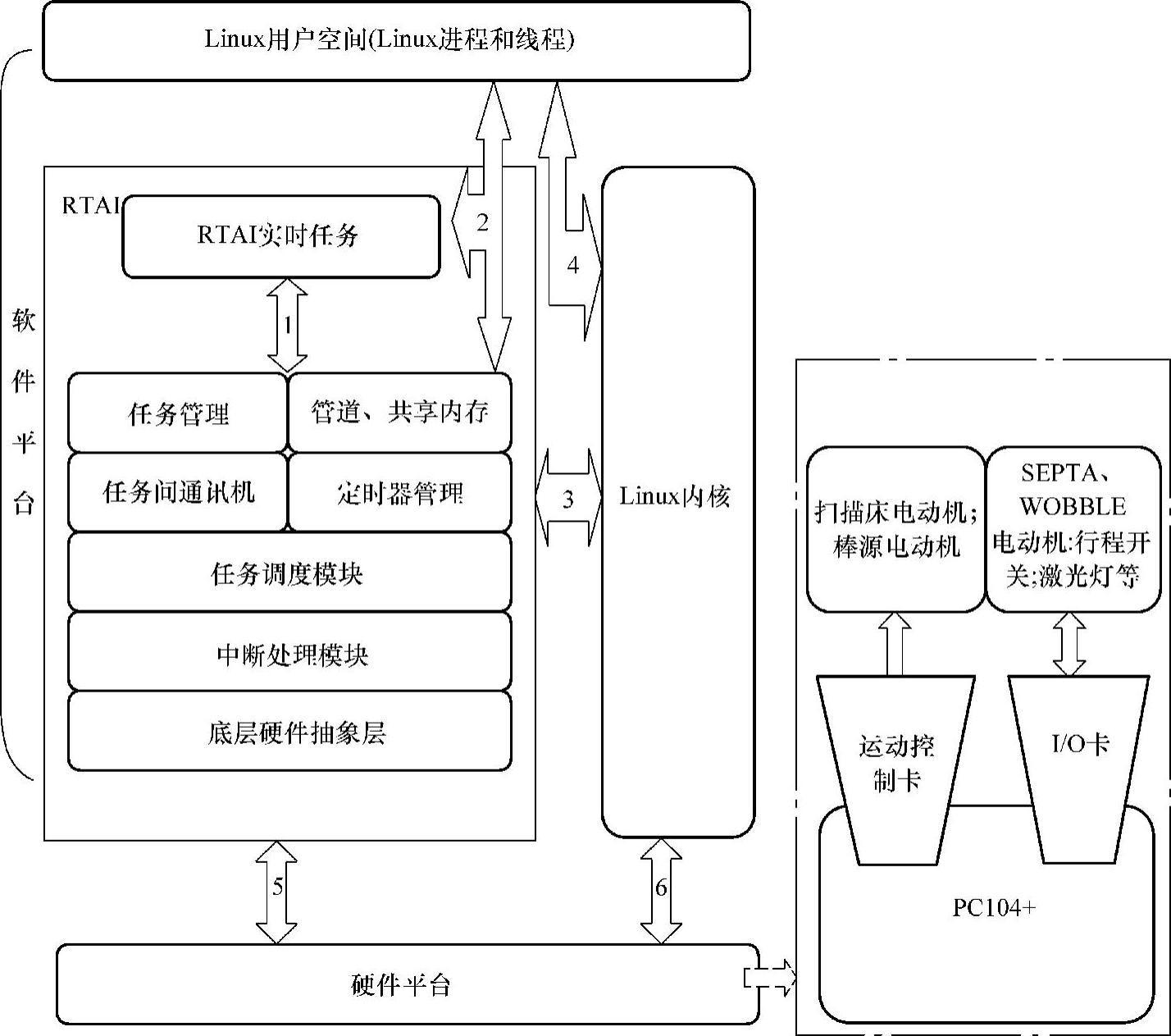
图9-4 系统整体结构
在用户空间:
①接收/反馈进程主要功能是通过远程过程调用的socket接口和主机sun相连接,从sun接命令信息并把命令信息传递到commFIFO,同时发起另一个线程statusTask完成状态和检测信息的反馈。
②显示进程是在用户空间运行的另一个进程,该进程通过串口485把错误信息、床位置等送到显示屏显示。
在内核空间:
①comTask任务主要功能完成各实时任务的初始化工作,从commFIFO接命令信息并按要求发送到其他邮箱。(https://www.xing528.com)
②bedTask任务主要功能是从bedMBX邮箱接收床控命令并完成床的相应运动。
③rapTask任务主要功能从rapMBX邮箱接棒源、隔板(Septa)以及摆动装置控制命令并完成相应运动。
④errTask任务的主要功能完成从errMBX邮箱接错误命令信息并传给用户空间的显示进程。
⑤monTask任务的主要功能是完成各种状态监控。
⑥dioTask任务的主要功能是完成控制面板和I/O卡信号的监控。
主机系统和用户空间的进程的通信主要是依靠远程过程调用(RPC)完成,主要调用sock接口函数完成。内核空间和用户空间下进程的通信主要是依靠实时扩展部件RTAI提供的实时FIFO和共享内存来完成。内核空间的实时任务之间的通信依靠邮箱完成。
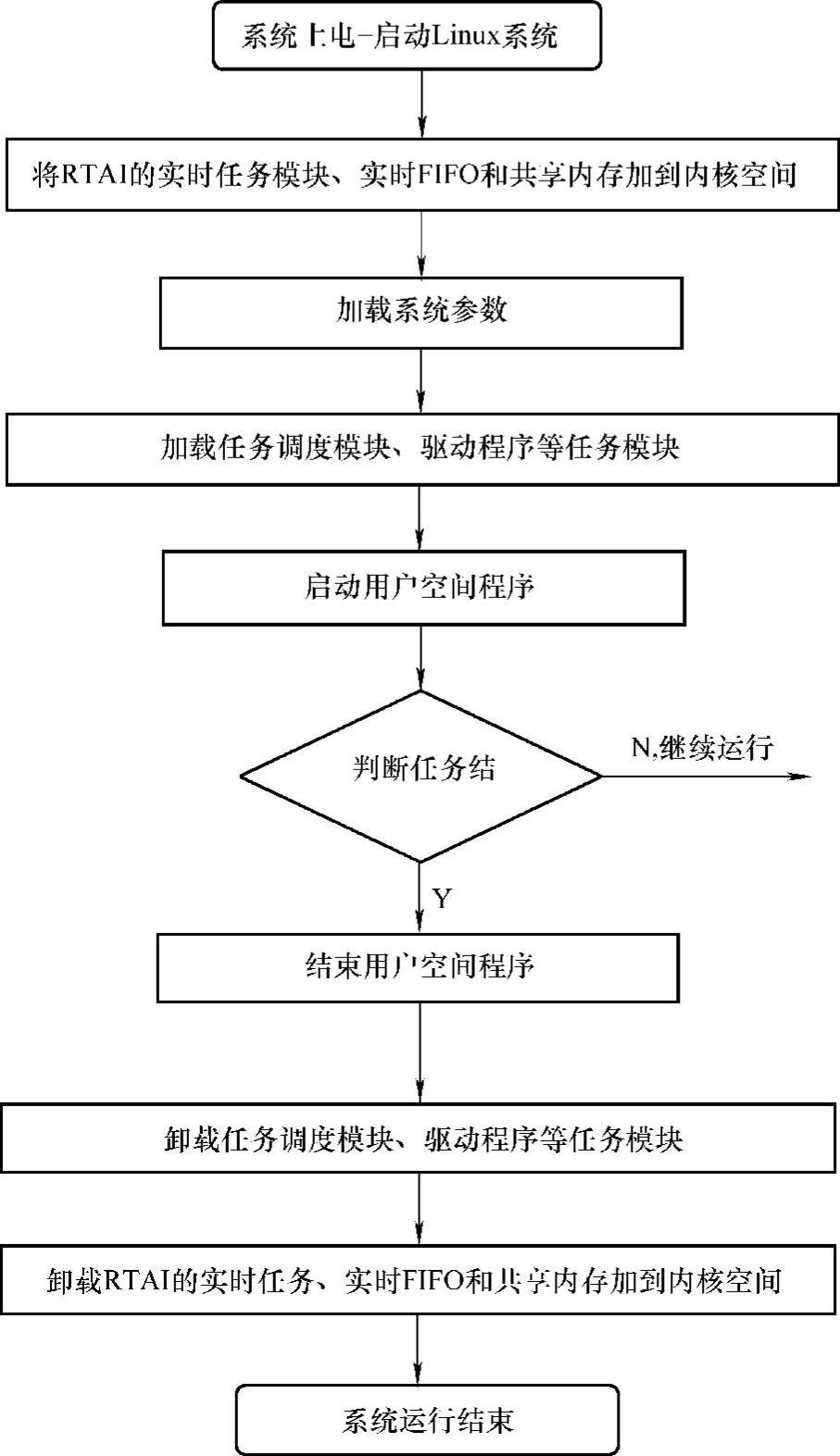
图9-5 系统执行过程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。