



下面用一个例子来说明本文提出的DM算法比iWM算法具有更好的鲁棒性。首先分别用iWM算法和DM算法产生各自的模糊规则库,然后用各自的模糊规则库形成相应的模糊系统逼近下列非线性函数

设输入x的范围为[-1,1],隶属度函数采用高斯函数;输出y的隶属度函数采用三角函数。
在实际工程中,得到全部理想数据是十分困难的。我们得到的数据常常带有一些干扰数据,因此算法具有一定的抗干扰性(鲁棒性)是十分重要的。下面通过一个实验对比两种方法的鲁棒性。设理想样本数据为T={t1,t2,…,t11}。为考察鲁棒性,在样本集里增加一个坏的数据记录t12,也就是样本数据为T={t1,t2,…,t11,t12}。
表2-4 第三种情况的样本数据(非理想情况)

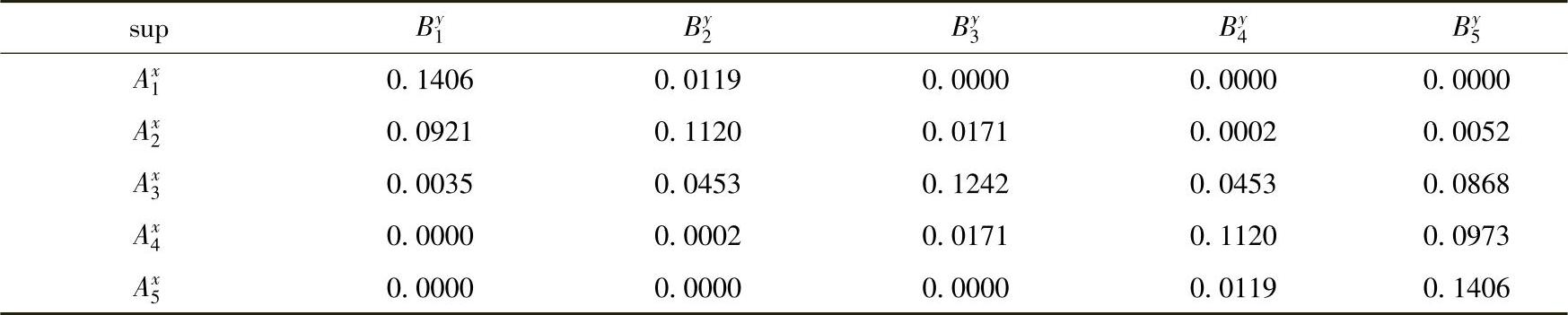
第一种情况:将输出x和输出y都分割成5个模糊集,分别用{A1,…,A5}和{B1,…,B5}表示。在坏的数据干扰情况下,用iWM和DM算法计算的平均值和支持度如表2-5a和表2-5b所示,由此表计算的模糊模型如图2-8所示。其中,图2-8a表示用iWM算法获得的模糊模型的逼近仿真结果,曲线误差为:0.21899;图2-8b表示用DM算法获得的模糊模型的逼近仿真结果,曲线误差为:0.13225。图2-8a的逼近精度明显低于图2-8b的逼近精度,这种情况说明DM算法在完备性方面优于iWM算法。
表2-5a 计算平均值(情况一)
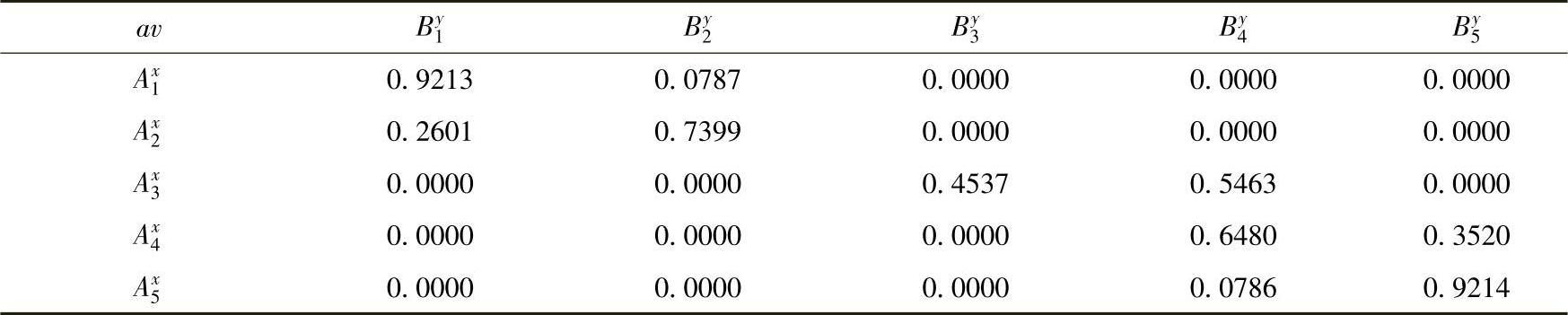
表2-5b 计算支持度(情况一)
 (https://www.xing528.com)
(https://www.xing528.com)
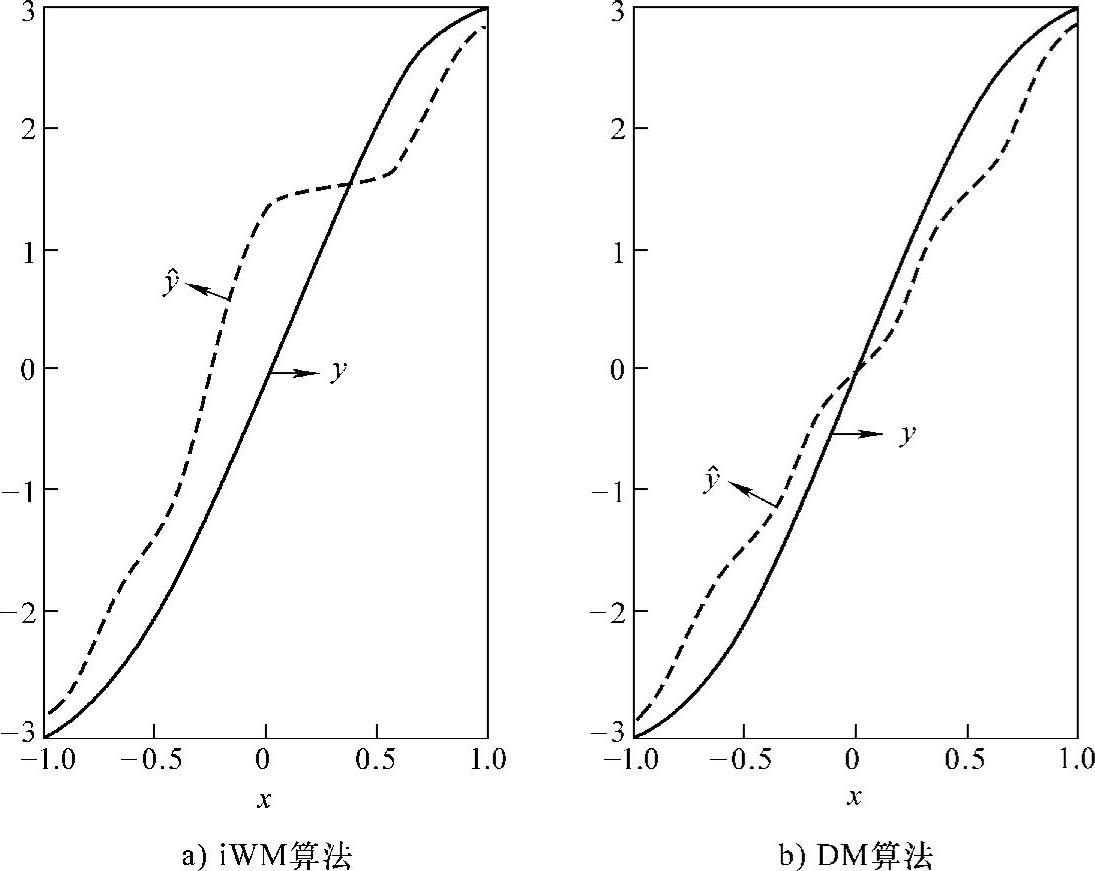
图2-8 估计模型和实际模型
第二种情况:将输出x和输出y都分割成7个模糊集,分别用{A1,…,A7}和{B1,…,B7}表示。在坏的数据干扰情况下,用iWM和DM算法计算的平均值和支持度如表2-6a和表2-6b所示,由此表计算的模糊模型如图2-9所示。其中,图2-9a表示用iWM算法获得的模糊仿真结果,曲线误差为:0.14296;图2-9b表示用DM算法获得的模糊仿真结果,曲线误差为:0.0797。图2-9a的逼近精度明显低于图2-9b的逼近精度,这种情况说明DM算法在完备性方面优于iWM算法。
表2-6a 计算平均值(情况二)
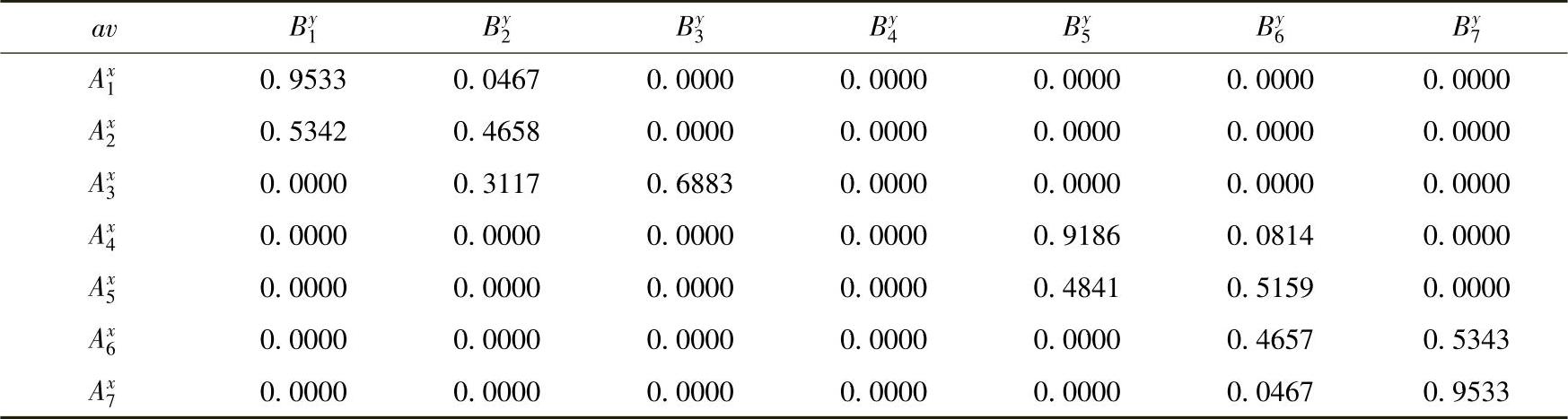
表2-6b 计算支持度(情况二)
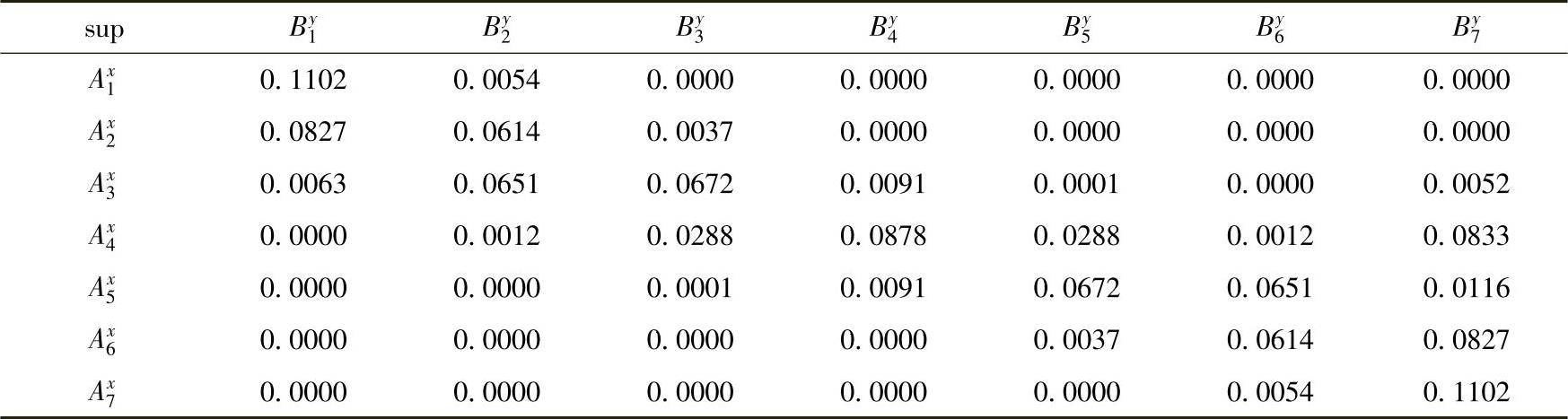
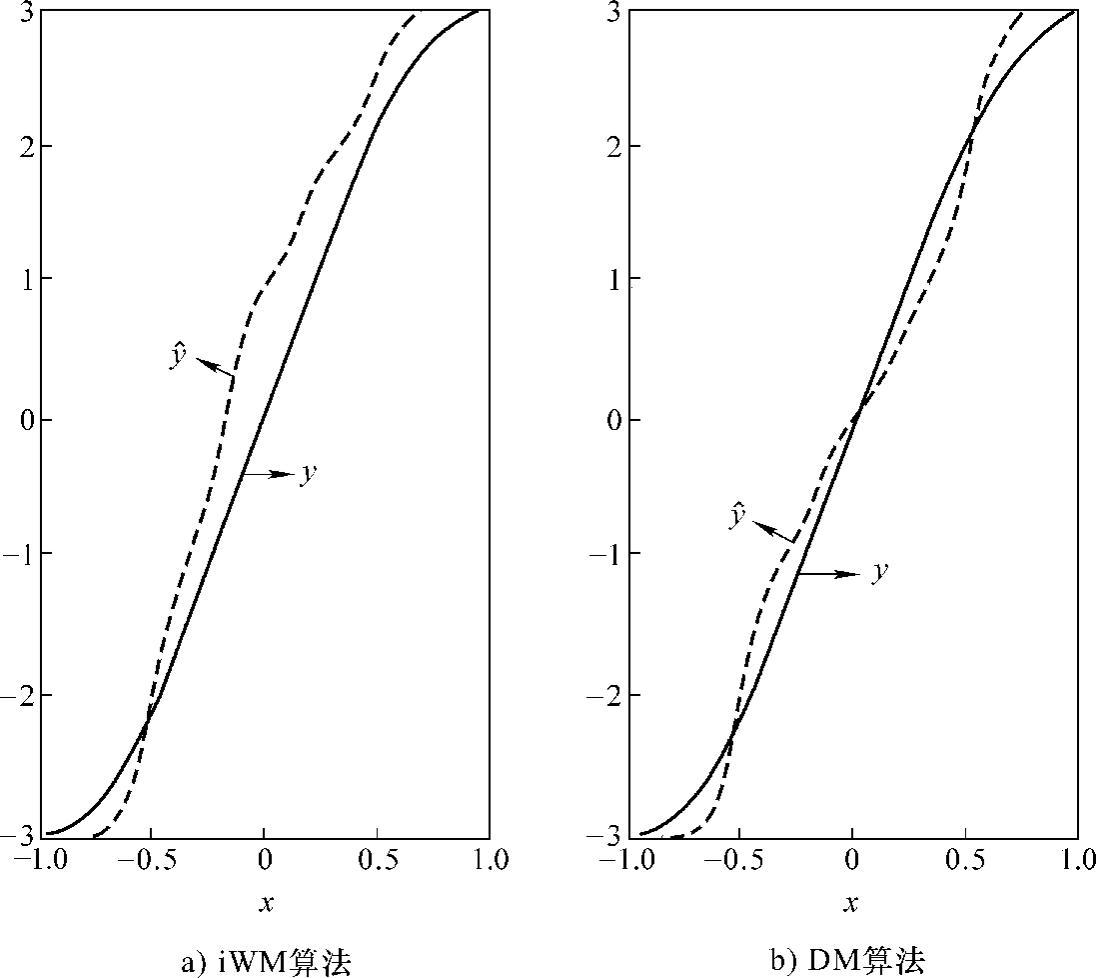
图2-9 估计模型和实际模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。