



PET的机电控制部分尽管不直接参与投影数据的探测、编码、符合、采集和成像的整个流程,但同样在PET系统中起着举足轻重的作用。作为系统底层硬件与上层服务器之间通信以及底层硬件之间通信的交通枢纽,它负责接收来自上层服务器的命令,传给底层执行部件,命令这些部件做相应的动作,然后再将底层执行部件的完成情况和当前状态实时反馈给服务器作相应处理,同时它为前端数据采集子系统提供增益表和编码表等控制信息。可以说,机电控制部分几乎完成除机械设计和整个成像生成外的所有底层执行部件控制以及状态显示,各种模拟量、数据量的采集与控制工作,为系统成像作好各种准备工作。PET的机电控制部的实际设备和实验设备如图9-1所示。
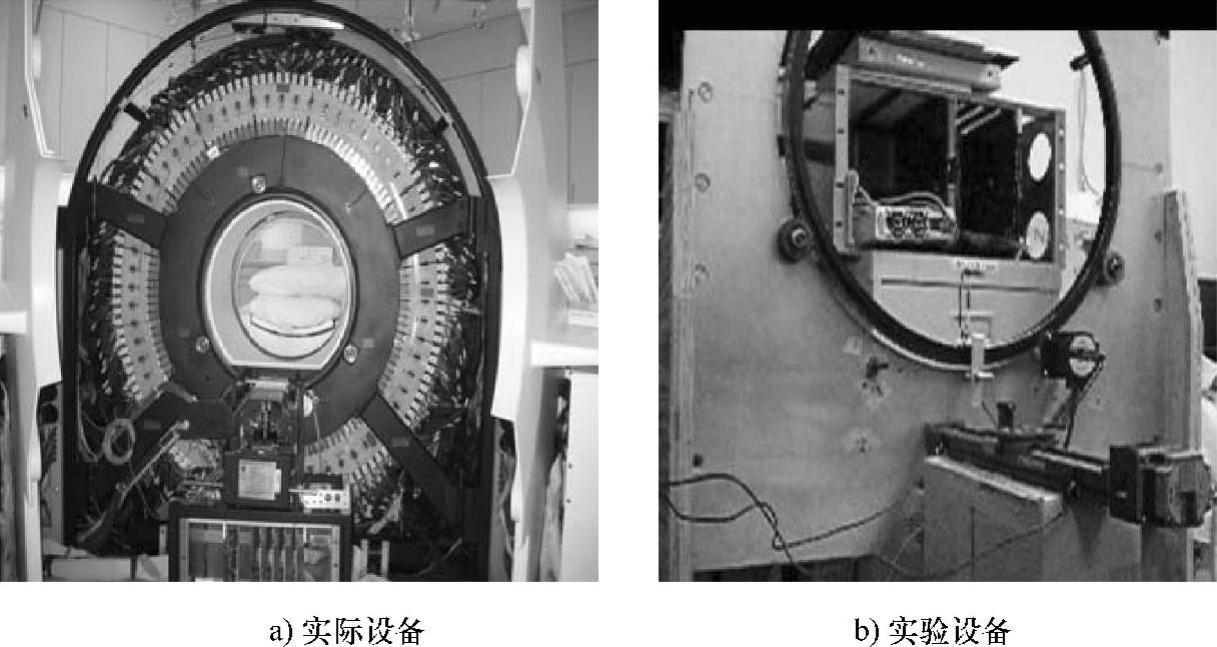
图9-1 实际设备与实验设备
1.PET的机电子系统
PET的机电控制部分主要包括下面几个子系统:
1)扫描床子系统:该子系统主要完成扫描床的水平和升降运动,其中升降运动采用手动方式,而水平运动采用交流伺服电动机驱动形成闭环自动控制。
2)棒源子系统:该子系统主要完成环和多棒源运动。棒源子系统的主要目的是完成衰减扫描,最后和发射扫描融合形成最后的PET图像。该子系统用步进电动机驱动形成开环自动控制。
3)隔板子系统:该子系统主要完成隔板(Septa)从采集孔的移出和移进,如果隔板从采集孔移出,系统将做3D扫描;如果隔板移进采集孔,系统将做2D扫描。该子系统也用步进电动机驱动形成开环自动控制。
4)摆动装置子系统:该子系统主要完成摆动装置(Wobble)的摆动,摆动装置的摆动将增加采集率和投影计数率。该子系统也用步进电动机驱动形成开环自动控制。
2.PC/104与PC/104+
PC/104是一种专门为嵌入式控制而定义的工业控制总线,近年来在国际上广泛流行,被IEEE协会定义为IEEE-P996.1。我们知道,IEEE-P996是PC和PC/AT工业总线规范,而从PC/104被定义为IEEE-P996.1就可以看出,PC/104总线实质上是一种紧凑型,小型化的IEEE-P996,其总线信号定义和PC/AT基本一致,但电气和机械规范却完全不同,是一种优化的、小型化、堆栈式结构的嵌入式控制系统。(https://www.xing528.com)
PC104有两个版本,8位和16位,分别与PC和PC/AT相对应。在PC104总线的两个版本中,8位PC104共有64个总线管脚,单列双排插针和插孔,P1:64针,P2:40针,合计104个总线信号,PC104因此得名。PC104+是专为PCI总线设计的,可以连接高速外接设备。PC104+在硬件上通过一个3X40即120孔插座,PC104+包括了PCI规范2.1版要求的所有信号。为了向下兼容,PC104+保持了PC104的所有特性。我们选用PC/104+作为PET计算机控制系统。PC104和PC104+如图9-2所示。
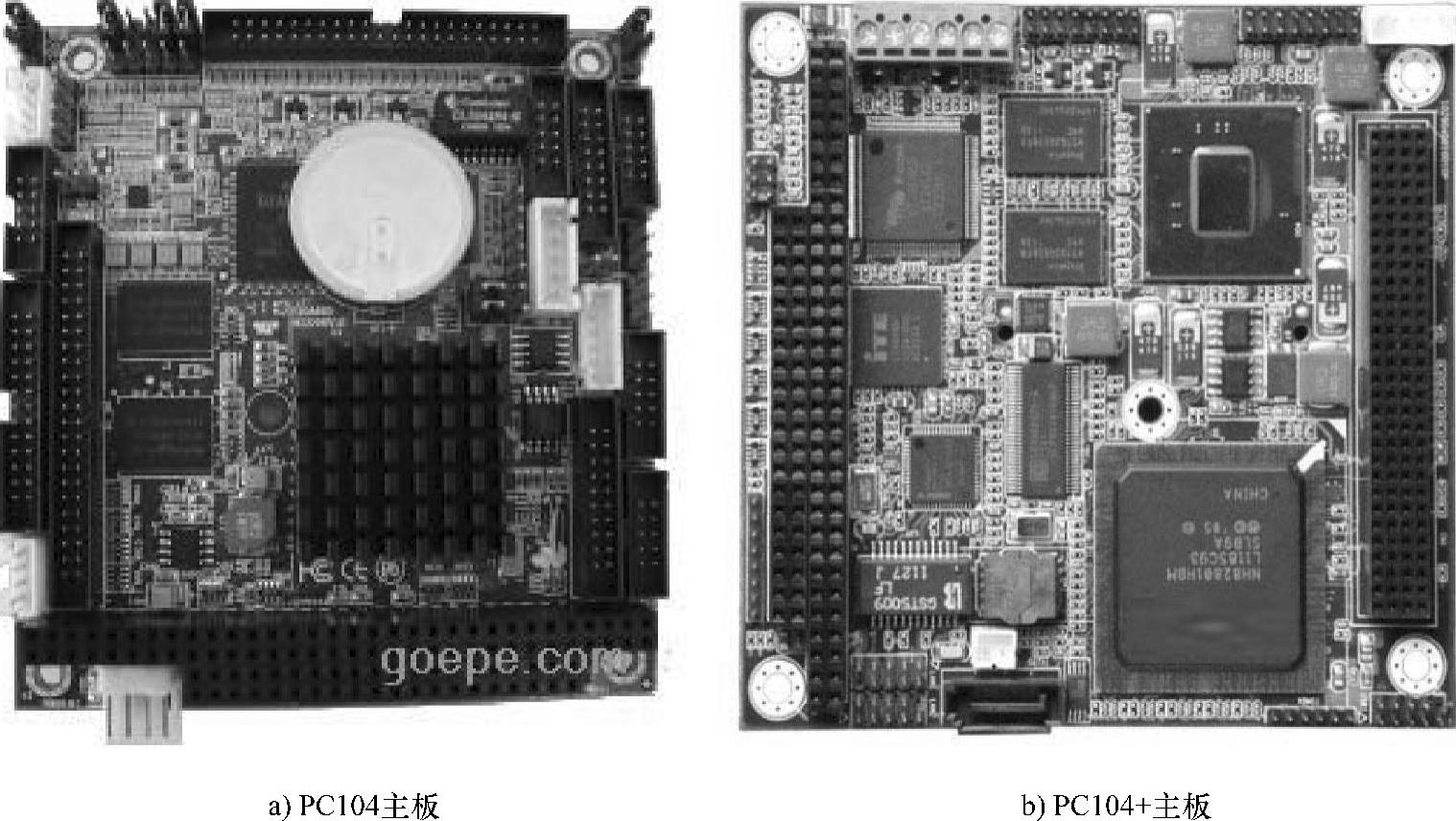
图9-2 PC104主板与PC104+主板
3.运动控制卡
在对PET机电子系统进行运动控制时,可以采用商用化的PLC控制器或运动控制卡。由于PLC的控制精度远低于板卡类,我们采用了运动控制卡。运动控制卡通常是采用专业的运动控制芯片或高速DSP来满足一系列运动控制需求的控制单元,其可通过PCI PC104等总线接口安装到PC和工业PC上,可与步进和伺服驱动器连接,驱动步进和伺服电动机完成各种运动(单轴运动、多轴联动、多轴插补等),接收各种输入信号,可输出控制继电器、电磁阀和气缸等元件。用户可使用VC\VB等开发工具,调用运动控制卡函数库,快速开发软件。运动控制卡是PCI、cPCL、PXI等总线形式的板卡,通俗的说我们可以把它看成一个单片机,有自己的算法,可以通过VC、VB、labview、BCB等语言实现其功能。其中比较有名的是美国PMAC运动控制卡,考虑成本因素,最后我们选择了日本的PCL6045B运动控制卡。
4.伺服器与伺服电动机
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电动机或全数字式交流伺服电动机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。步进电动机是一种离散运动的装置,步进电动机是按照特性命名的,指它的转动是一步一步的。例如一个360分度的步进电动机,转一圈要走360步,每一步转1°,如果你要求它转半度,是不可能实现的。所以步进电动机是把一圈分成若干步,不累积误差,一般用做开环控制。在目前国内的数字控制系统中,步进电动机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电动机也越来越多地应用于数字控制系统中。伺服电动机一般是功率小,运行精确,能高速制动,惯量小,适合闭环控制,也就是能检测到实际位置和理论位置的误差,并消除误差。综上所述,交流伺服系统在许多性能方面都优于步进电动机。但在一些要求不高的场合也经常用步进电动机来做执行电动机。所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电动机。在PET扫描床子系统选用了交流伺服电动机,而棒源子系统、隔板子系统和摆动装置子系统选用了步进电动机。选用了日本富士的RYC401D3-VVT2伺服器和日本富士伺服电动机。伺服器与伺服电动机如图9-3所示。

图9-3 伺服器与伺服电动机
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。