



PWM功能可以通过PWM波形来控制现场设备的速度。只有基本单元为BXB的控制器支持该功能,AWA和BWA型号的控制器无此功能。高速输出通道被定义为O/2和O/3。
PWM具有两个主要部分:输出频率和占空比。
PWM指令和HSC、PTO一样,与绝大多数控制器指令是不同的。它们的运行是由用户电路完成的,而用户电路与控制器主系统处理器是并行工作的。因为某些高速性能的应用场合需要这样的特性。
通过扫描在主程序文件(文件号2)中的PWM指令,或扫描在任何子程序文件中的PWM指令,可以与PWM子系统接口。PWM的典型工作顺序如下:
1)PWM指令所在的梯级逻辑转为真(PWM指令被启动)。
2)产生指定频率的波形。
3)进入RUN(匀速运动)阶段,输出所设定的输出频率和占空比的波形。
4)PWM指令所在的梯级逻辑转为假。
5)PWM指令回到空闲状态。
PWM指令与处理器系统是并行工作的,因此,处理器每扫描PWM指令一次,其状态位和其他信息才被刷新一次。这样,用户控制程序可以在PWM输出时读出其状态。由于PWM状态只有在控制器扫描时才被刷新,因此刷新的最大延时时间就是控制器的最大扫描时间。将PWM指令放在STI(可选定时中断)文件中可以使刷新延时时间最小化,或者在控制程序内适当增加PWM指令,也可增加扫描频率,减小刷新延时时间。
1.PWM功能文件(https://www.xing528.com)
PWM功能文件见表7-11。
表7-11 PWM功能文件
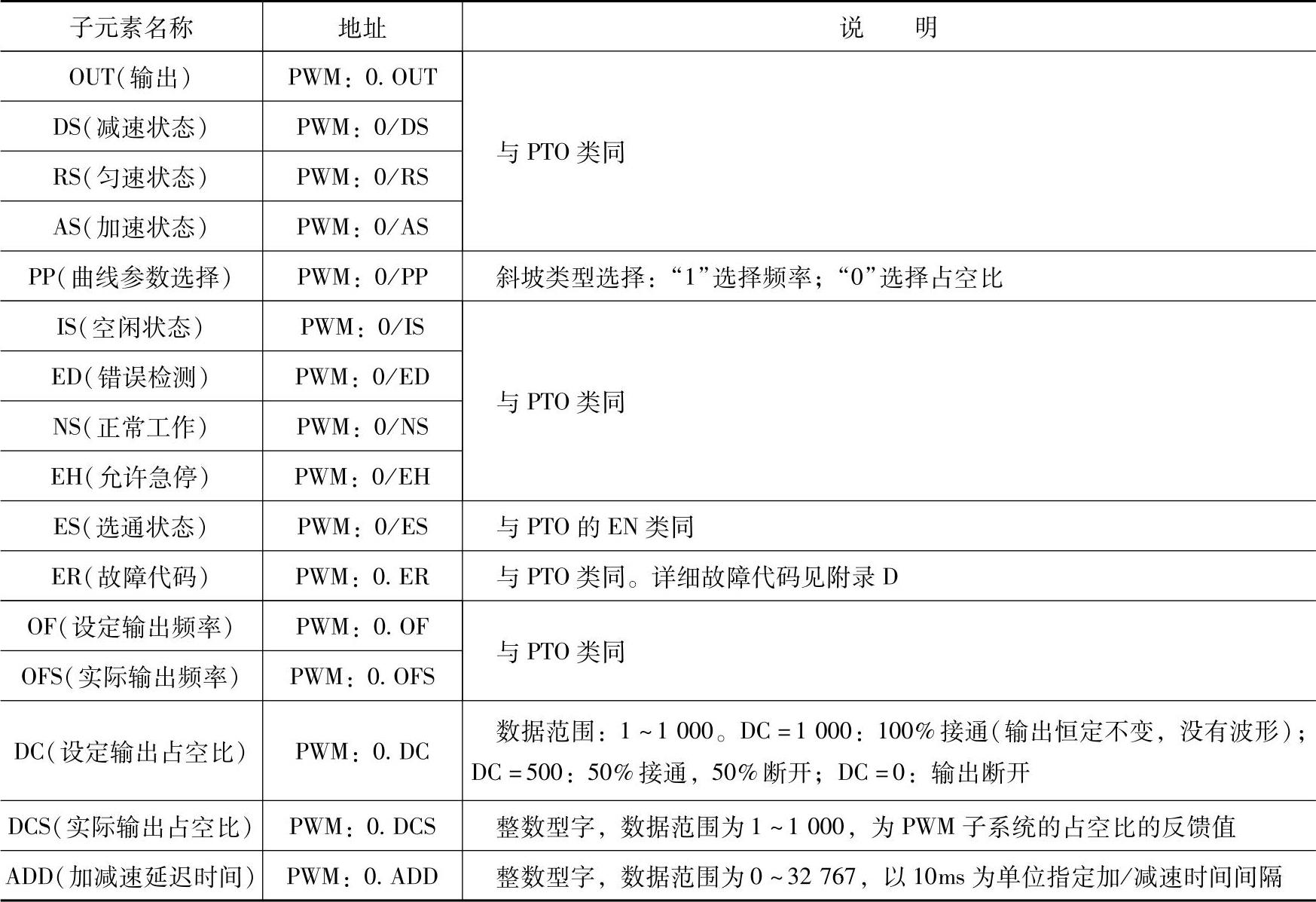
注:表中是以PWM0为例。如果使用PWM1,则地址做相应的替代即可。
2.PWM指令
PWM指令如图7-13所示。
图7-13 PWM指令
PWM是一个输出指令。PWM Number=1,指PWM1;PWM Number=0,指PWM0。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。