



在本节中,我们将对目标在地面测试图中进行定位。首先,利用立体化算法计算目标在固定摄像机坐标系中的三维位置[Xw,Yw,Zw]。然后,按以下方式得到目标在测试图中的位置[Xm,Ym]:
[Xm,Ym,1]=Hwm×[Xw,Yw,1], (15.5)
其中,Hwm表示一个单应性矩阵,也就是,部分已知点(如角点、标志点、顶点)的地面位置[Xw,Yw]的齐次坐标和它们各自在测试图上的位置之间存在一个单应性矩阵。
有许多计算两个平面视场之间单应性的方法。例如,基于直接线性变换(DLT)或者奇异值分解(SVD)的技术。本节中,我们已经使用IRST算法得到了所希望的鲁棒单应性。和传统的最小二乘法相比,这种算法对异常值不够敏感,最小化异常值的影响可以提供鲁棒的单应性。
本文中,基于立体化过程实现目标的定位。根据目标在世界坐标系中的坐标[Xw,Yw,Zw],计算目标的三维位置。在校正立体图像对之后,紧接着计算匹配对之间的视差。我们仅仅计算与目标有关的像素之间的视差。由于目标检测是在静态摄像机获取的图像中进行的,所以将其匹配像素的搜索范围限制在PTZ摄像机获取图像的相应极线上(如图15.3)。对于静态摄像机所获取图像Is中的目标像素,以任一目标像素为中心形成一个奇数维的小窗口,并使之固定不动,该小窗口与PTZ摄像机所获取图像Id上的某一窗口进行比较,并计算它们之间的相似度,注意Id上的窗口可以沿着相应的水平扫描线(极线)移动。利用归一化的SSD测度,来比较窗口之间的相似性,归一化的SSD测度度量图像灰度之间的差:

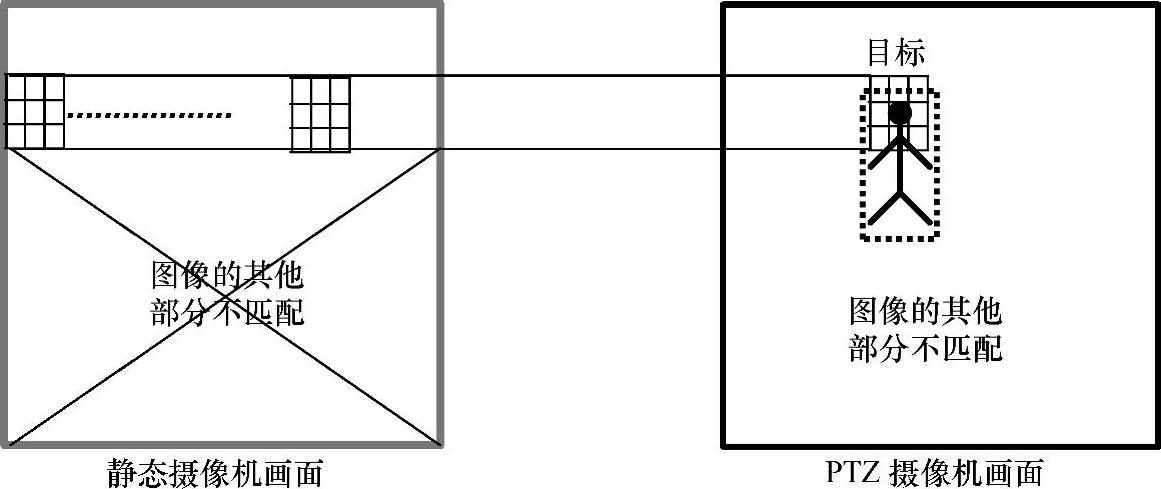
图15.3 改进的立体匹配方法(https://www.xing528.com)
其中,ξ∈[-n,n],η∈[-m,m],像素(x,y)的视差估计值使得SSD的误差达到最小:
d0(x,y)=argminC(x,y,d)
然而,注意到,对于每个视差,平方差仅需要计算一次,当窗口移动一个像素的时候,不需要对窗口重新求和。当目标在左右图像上的位置之间的视差d被计算出来以后,目标Zw沿着光轴到摄像机的距离可以使用以下公式计算出来:

其中,fr是校正后图像对的焦距,B表示基线距离。将静态摄像机所获取图像上的目标位置表示为(xs,ys),该位置能以摄像机的光轴为基准,统一表示为
一旦估计出目标的三维位置后,即可利用式(15.5)在测试图上进行定位。下一节,不同情况下的实验结果说明了该架构的可用性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。