



为了便于坐标变换,假设电动机的磁动势为正弦波分布。实际上,PMSM中都是配置正弦波分布的绕组,所以这种假设是成立的。因此,可以定义电动机的电压、电流和磁链等变量进行坐标变换,根据采用的不同坐标系,得到相应的坐标变换阵。为了使坐标变换阵简单易记,一般情况下,对于相同的坐标系间的变换,总是把电压、电流和磁链等变量的变换阵取为同一矩阵,即电流变换阵也就是电压变换阵,同时也是磁链变换阵。因此,本节会以电流变量来推导不同坐标系间的变换阵。
1.三相/两相变换(3/2变换)
在三相静止坐标系ABC和两相静止坐标系αβ之间的变换,简称3/2变换(即Clarke变换)。图2-5所示为ABC和αβ两个坐标系。为方便起见,取A相方向与α相方向重合。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。由于交流磁动势的大小随时间在变化,图中磁动势矢量的长度是随意的。
按坐标变换原则,当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在α、β轴上的投影都应相等,因此有
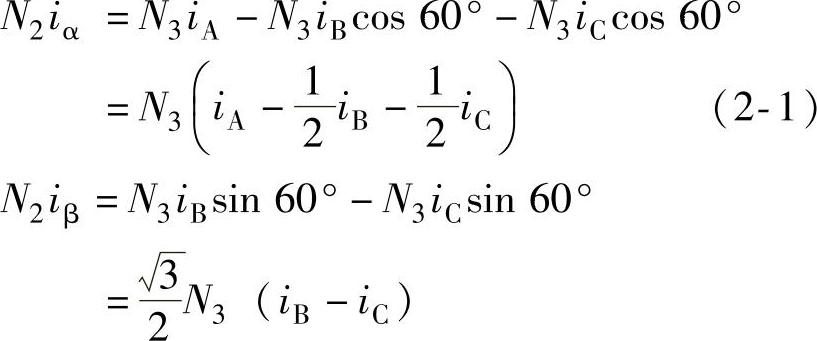
写成矩阵形式为
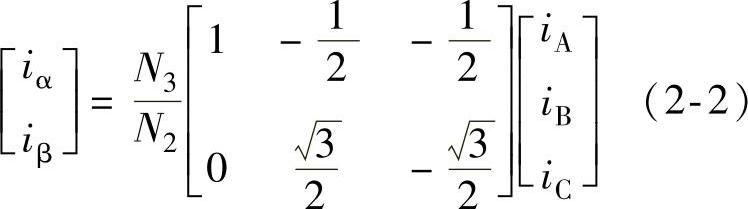
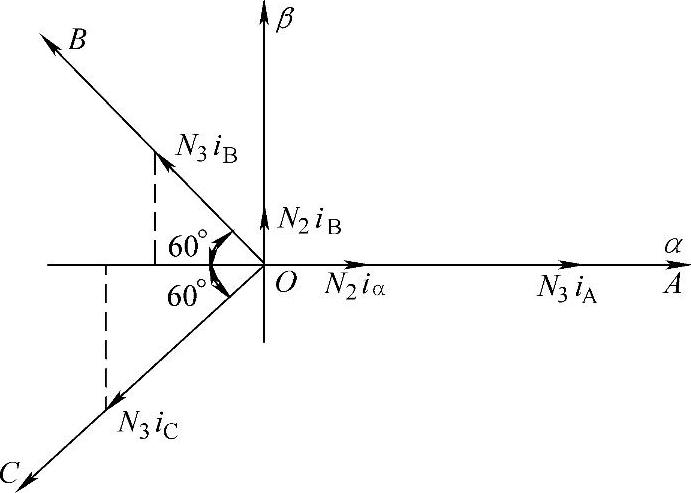
图2-5 三相和两相坐标系统
令C3/2表示从三相坐标系变换到两相坐标系的变换矩阵,则:

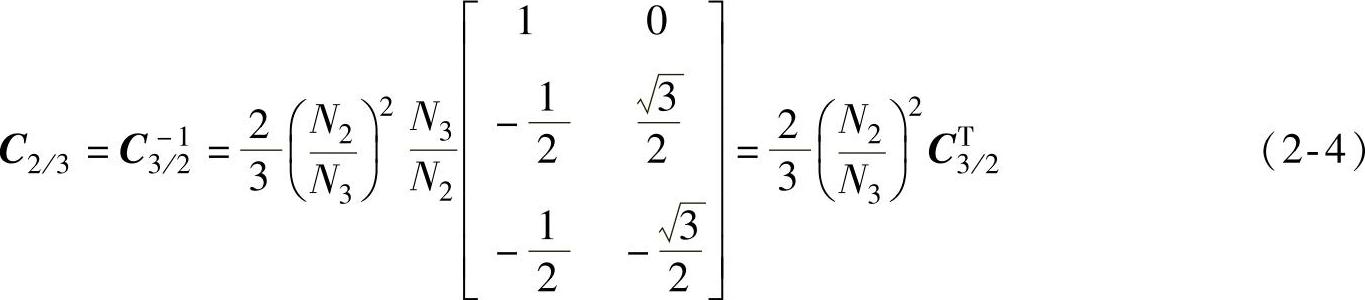
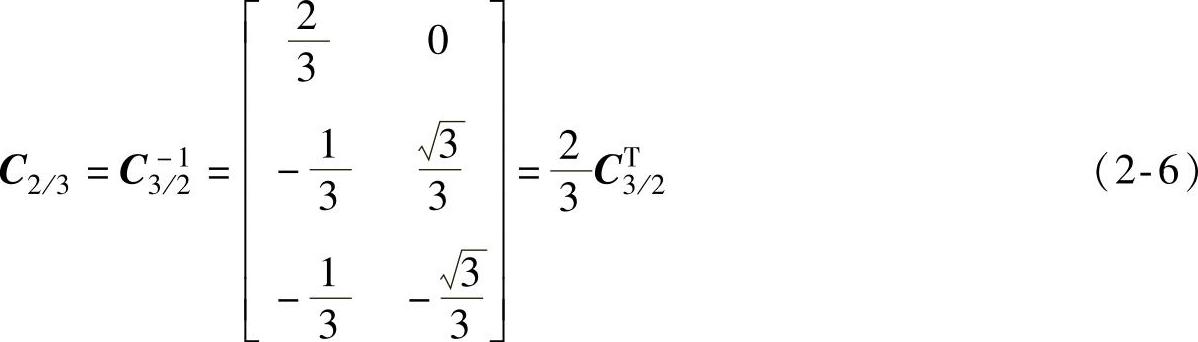
对式(2-3)求逆可得到从两相坐标系到三相坐标系的变换矩阵C2/3:
考虑变换前后电流幅值不变,在此前提下,式(2-3)改写为

式(2-4)可改写为
考虑变换前后总功率不变,在此前提下,可以得出

式(2-7)的证明请参考其他文献,这里为阐述的连续性,证明过程略去。因此,式(2-3)又可改写为(https://www.xing528.com)

式(2-4)又改写为
C∗2/3=C∗-13/2=C∗T3/2 (2-9)
由式(2-9)可以看出,功率不变的条件下,坐标变换的好处是只有一个坐标系间变换的变换阵,因此求坐标反变换时计算方便。由式(2-5)可以看出,幅值不变的条件下坐标变换的好处是容易理解,便于对控制系统变量分析,然而需要注意的是,在该条件下,坐标变换前后,功率发生了变化,变换后总功率为变换前总功率的2/3。本书出于对控制系统变量方便分析为目的,选择在幅值不变条件下进行坐标变换,因此得到的三相/两相坐标变换阵为式(2-5),其坐标反变换阵为式(2-6)。
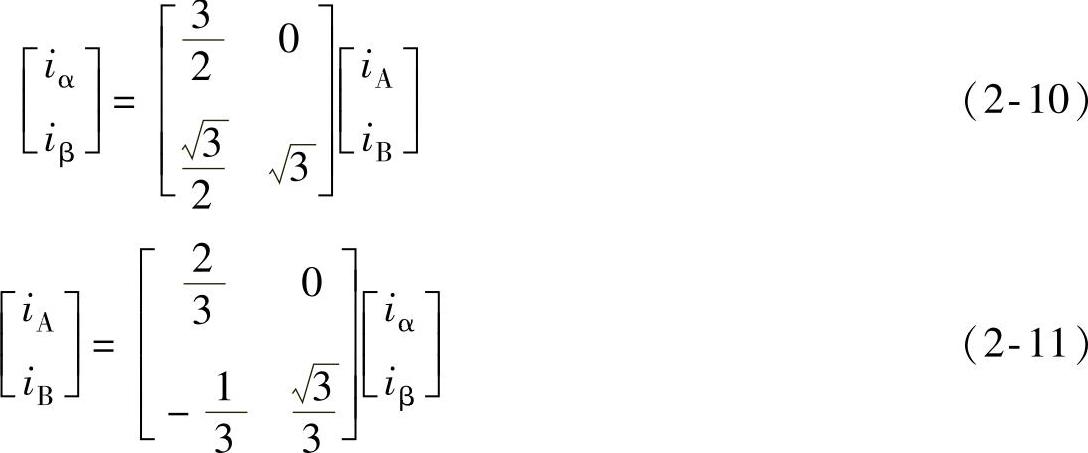
如果三相绕组是 联结不带零线,则有iA+iB+iC=0,或iC=-iA-iB。将其代入式(2-5)和式(2-6),并整理后得
联结不带零线,则有iA+iB+iC=0,或iC=-iA-iB。将其代入式(2-5)和式(2-6),并整理后得
2.两相/两相旋转变换(2s/2r变换)
在两相静止坐标系αβ和两相旋转坐标系dq之间的变换,简称2s/2r变换(即Park变换),其中s表示静止,r表示旋转。把两个坐标系画在一起,如图2-6所示。图中,由于各绕组匝数都相等,可以消去磁动势中的匝数,而直接标上电流i。d、q轴和矢量F都以角速度ω1旋转,因此分量id、iq的长短不变,相当于d、q绕组的直流磁动势。但α轴、β轴是静止的,α轴与d轴的夹角θ随时间变化,因此i在α轴、β轴上的分量iα、iβ的长短也随时间变化,相当于α、β绕组交流磁动势的瞬时值。

图2-6 两相静止和两相旋转坐标系
由此可见,iα、iβ和id、iq之间存在着下列关系:

则由两相静止坐标系变换到两相旋转坐标系的变换矩阵C2s/2r为

对式(2-13)求逆可得到由两相旋转坐标系到两相静止坐标系的变换矩阵C2r/2s为

3.3s/2r变换
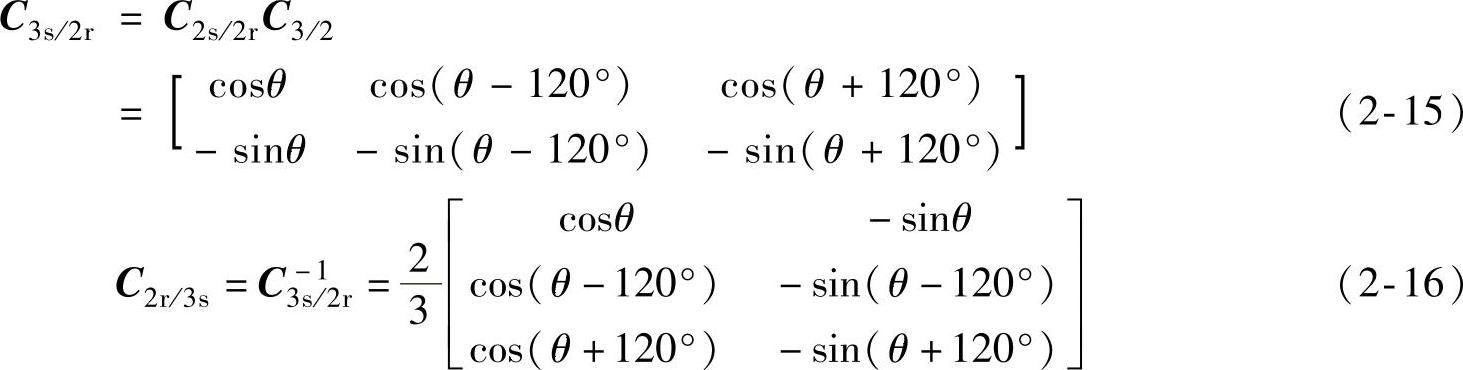
如果要从三相静止坐标系ABC变换到任意转速的两相旋转坐标系dq,可以利用前面已导出的变换阵,先将ABC坐标系变换到静止αβ坐标系,取α轴与A轴一致,然后再从αβ坐标系变换到dq坐标系,取α轴到d轴的夹角为θ。可得
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。