



稳定是控制系统的重要性能,也是系统能够正常运行的首要条件。在交流伺服控制系统设计中,分析三闭环结构是否稳定并不重要,因为工业中即使是临界稳定的系统也是没有用的。对于设计人员来说,花费大量精力的重点在于测量系统有多稳定,或者准确地说在于测量系统所拥有的稳定性裕度有多大。
无论是在工程应用中,还是在理论研究上,这里推荐大家使用相位裕度(Phase Margin,PM)和增益裕度(Gain Margin,GM)来作为系统稳定程度的度量。这是因为:
①PM和GM是系统稳定性最直观的量度;
②开环设计法是数字的,适合于计算机;
③这种方法不需要对控制系统进行任何的简化性假设。
如果控制系统结构如图7-3a所示,断开反馈回路,得到该系统开环传递函数的对数频率特性曲线如图b所示。图中,相位裕度(PM)(通常也称为相角裕度)定义为180°加开环幅相曲线幅值为1时的相位:
γ=180°+G(jωc)H(jωc) (7-1)
式中 ωc——系统的截止角频率。
增益裕度(GM,通常也称为幅值裕度)定义为幅相曲线上,相位为-180°时对应幅值的倒数:
 (https://www.xing528.com)
(https://www.xing528.com)
式中 ωg——相角交界角频率。
通常幅值裕度用分贝值dB表示,式(7-2)可修改写为

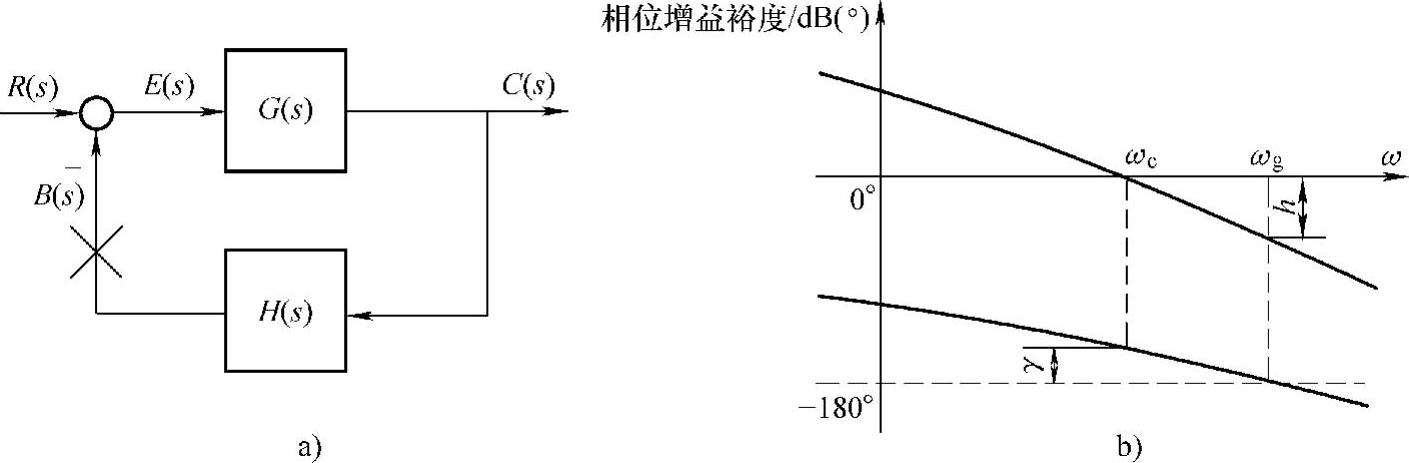
图7-3 控制系统的稳定裕度定义
a)简单系统结构框图 b)对数频率特性曲线
虽然目标是测量PM和GM的值,但是确定这两个量度的期望值需要判断。其原因之一是裕度大小随应用要求的变化而变化。例如,有些必须跟随指令信号,如阶跃指令信号的场合,除了极稳定的系统外都会产生超调。相对于响应变化柔和的指令信号来说,这样的应用需要更高的稳定裕度。此外,与其他应用相比,有些应用可以承受更大的超调量。最后,对于同样的响应,有些控制方法需要比其他方法更大的相位裕度或者增益裕度。例如,对于一个阶跃响应来说,要获得相同的超调量,PI调节器需要一定的相位裕度,而对于PID调节器来说,较小的相位裕度就可能消除所有超调。经验表明,增益裕度(GM)应为10~25dB,而相位裕度(PM)应为35°~80°,这取决于具体应用及控制器类型。一般情况下,幅值裕度越大越好,同样,相角裕度也是越大越好。
由于增益穿越处及其附近的相位滞后降低了相位裕度,于是在整个控制回路中的每个噪声滤波器、反馈装置以及功率变换器均带来了相位滞后,每个相位滞后都侵蚀相位裕度,没必要的相位滞后限制了调节器的最终性能。因此,一条最基本的控制法则是:消除没必要的相位滞后。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。