



由振动模型,即式(7-55)给出的频率响应如图7-34所示。图中,增益在谷底的频率称为抗谐振频率FAR,或者称为反共振频率;增益处于峰值时的频率称为谐振频率FR,或者称为共振频率。在抗谐振频率,式(7-55)的分子值最小,这种情况有如下关系:

上式可以通过把式(7-55)中的分子转换为
JLs2+KS=JL(s2+ω2N) (7-58)
的形式来获得,显然,ω2N=KS/JL。同样,在谐振频率,分母达到最小值,有如下关系:

该式可以通过把式(7-55)中的分母转换为

的形式来获得。
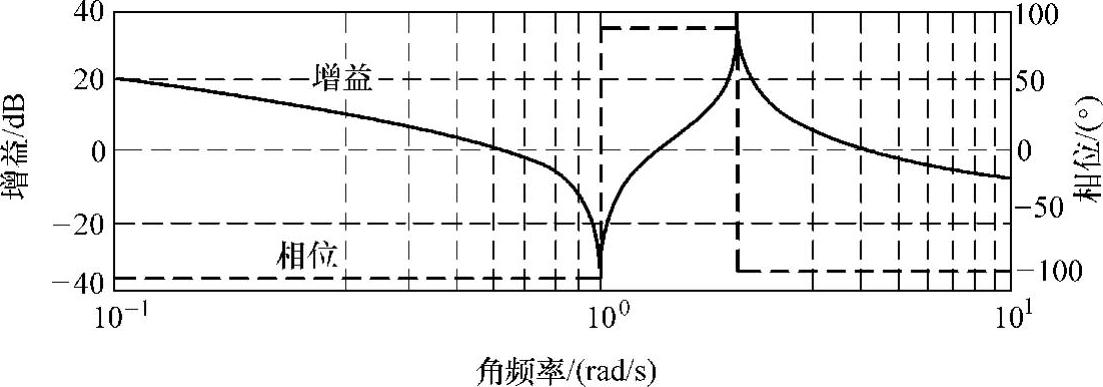
图7-34 典型双惯性系统的频率响应特性
关于抗谐振频率和谐振频率的特征可以用一个简单的例子来说明,如图7-35所示。图中,伺服和装置简单地以一根弹簧连接。这时,逐渐让伺服系统做快速的往复运动,会出现三种情况,即装置与伺服系统同速动,装置比伺服系统摇晃剧烈和装置几乎不动。第一种情况是正常的状态,第二种情况其往复间隔为反振动频率,第三种情况其往复间隔为振动频率。(https://www.xing528.com)
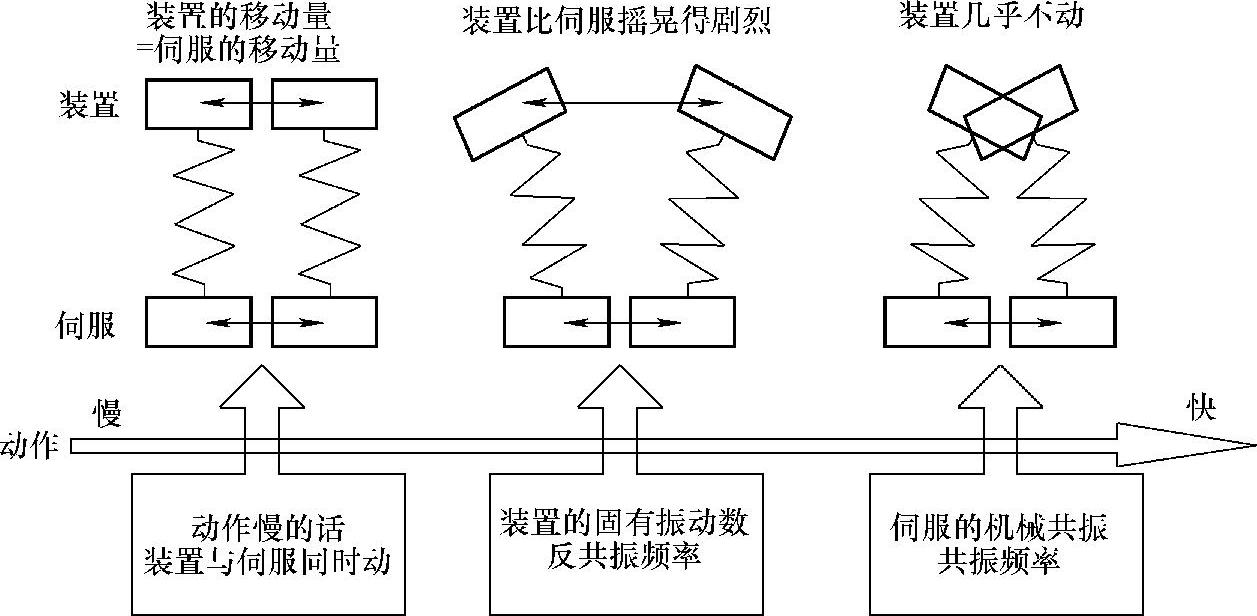
图7-35 共振频率和反共振频率的动作效应
当发生反共振时,伺服电动机很难运转,输入到电动机中的能量立即流向了负载装置,装置以固有振动频率摇动,这个频率与电动机转动惯量无关;在摇晃过程中,装置负载会发生强度很大的振荡,弹簧严重弯曲变形。当发生共振时,装置几乎不动,就像没有负载一样,电动机运动没受到任何阻力,就像总转动惯量非常小,从而使得回路增益变得非常大一样。
下面继续分析图7-34的频率响应特性。由图7-34可以看到:在低频段,系统具有转动惯量(JM+JL)的刚体特性;在高频段,系统近似为具有转动惯量JM的刚体特性;然而在中间频率,系统则分别具有反振动特性和振动特性。在由反振动特性到振动特性的交替过程中,增益上涨,相位也将再滞后,很大程度上减小了幅值裕度和相位裕度。由振动频率式(7-59)和反振动频率式(7-57)可知,KS、JM和JL会对系统振动产生很大的影响。
不难得出,整个频域范围内,系统具有3个增益频率穿越点和两个相位频率穿越点。系统产生不稳定多数发生在高于第1个相位频率穿越点之后,或者在第3个增益频率穿越点附近。第一个相位穿越发生后,虽然系统的增益会随着频率的增大而减小,但是可能在之后的一个狭窄的频段内,增益会迅速增大,频率值在共振频率处的增益增长最大,导致系统减小幅值裕度最大。因此,尖峰或者尖峰形成的过程很大程度上引起系统不稳定,由于尖峰形成的频率范围狭窄,这类振动多数发生在机械的振动频率点上。
第2种不稳定情况的发生可能是在高于振动频率点之后。闭环增益会在高于振动频率点之后的某个频率位置形成凸峰,引起系统不稳定,这个频率点一般在过第3个增益频率穿越点附近。因此确定,虽然这类振动发生的频率是不固定的,但一个重要的特征是它的振动频率高,而且通常远高于振动频率。
由此可见,机械柔性耦合是以两种方式产生不稳定的,针对不同方式的特征,可以采用不同的抑振方法。但是这两类问题产生是类似的,无论哪个,都可以理解为是由于转动惯量随着频率的变化而发生变化引起的。
通常,机器发出的声音提供了一条检验系统是否存在振动频率点不稳定或者过振动频率点不稳定的思路。一个在振动频率点振动的机器会发出纯音调的声音,听起来与音叉的声音非常相似。由于振动的频率是由机械固有频率所确定的,改变控制器的增益可能改变振动的强度,但通常不会改变音调。而由控制增益引起过振动频率点振动的情况不同,振动频率受控制回路增益的影响。运行过程中,环路增益的一些变化是常见的,例如,电流环中电动机电感的变化。每个增益的偏移可能会产生一个相应的不稳定性频率偏移,这样的变化导致振荡频率发生,产生畸变的音调,其结果是声音常常是粗糙、刺耳的噪声。此外,也要注意到有些振动的问题是这两种情况的组合,它的振荡频率是高于但仍接近于机械振动的固有频率。
另外,对于一个实际中的系统来说,由于传动装置有多个部件组成,不同的部件弹性不同,引发的谐振频率也会不同,谐振点会不止一个。例如,图7-31引起的机械谐振频率点如图7-36所示,通常,该类系统的传动装置引起的机械谐振频率会集中在100~2000Hz范围内。这种情况,建议设计者绘制系统的伯德(Bode)图,分析和确定振动与反振动频率,降低不稳定的可能性,来确保系统有足够的稳定裕度。
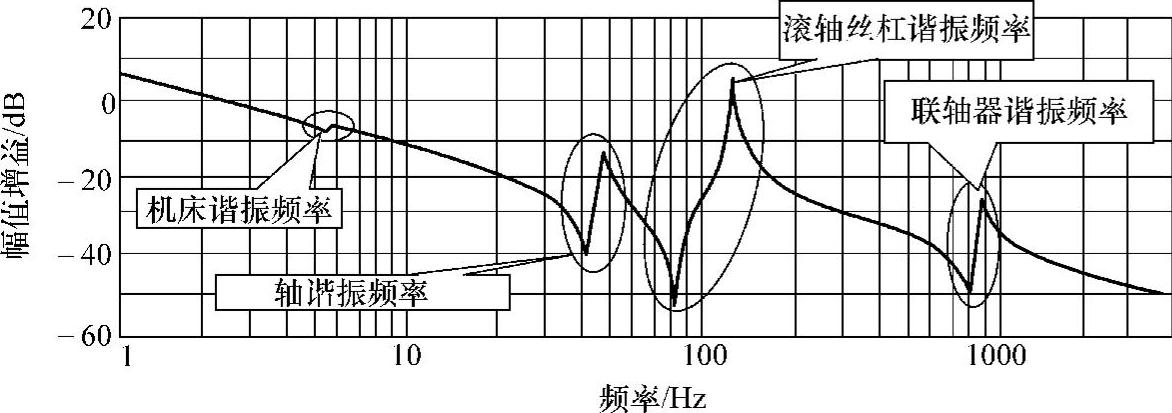
图7-36 不同弹性引起的机械谐振
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。