



有限冲击响应(FiniteImpulseResponse,FIR)滤波器的差分方程为

由式(9-36)可知,它具有如下优点:
①单位脉冲响应h(k)是有限长序列,因此FIR滤波器没有不稳定的问题;
②由于FIR为非递归结构,因此在有限准确度运算下,不会出现递归结构中的极限振荡等不稳定现象,误差较小;
③因而可以在幅度特性随意设计的同时,保证准确、严格的线性相位。
因此,FIR滤波器得到了广泛的关注,设计方法主要是通过加窗函数来计算出FIR滤波器的系数。不同的窗函数和有限序列的长度(滤波器阶数)对滤波器的特性具有很大的灵活性,本节研究的重点不是如何选择窗函数、不是如何用窗函数来设计滤波器系数,而是要弄清楚由上一节提到的不同转速估计方法确定出的系数具有如何的FIR滤波器特性。
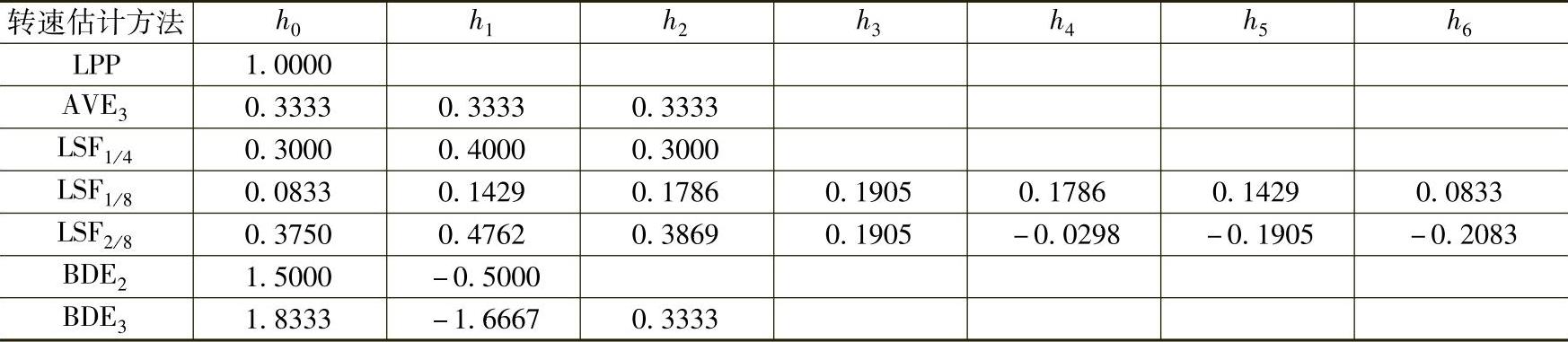
显而易见,上一节提到的4种转速估计方法,都能够由式(9-36)表示。有学者对LPP、AVE3、LSF1/4、LSF1/8、LSF2/8、BDE2和BDE3进行了FIR滤波特性研究,表9-2列出了这7种FIR滤波结构所对应的h(k)值。
表9-2 不同转速估计方法的FIR数字滤波器系数
首先对这7种转速估计值进行误差比较。实验内容包括低速、中速、高速、慢加速、中加速、快加速共6个方面,估计误差使用方均根差公式比较:

式中,vk——测速发电机测量值;
 ——转速瞬时估计值;
——转速瞬时估计值;
M——数据采样个数。
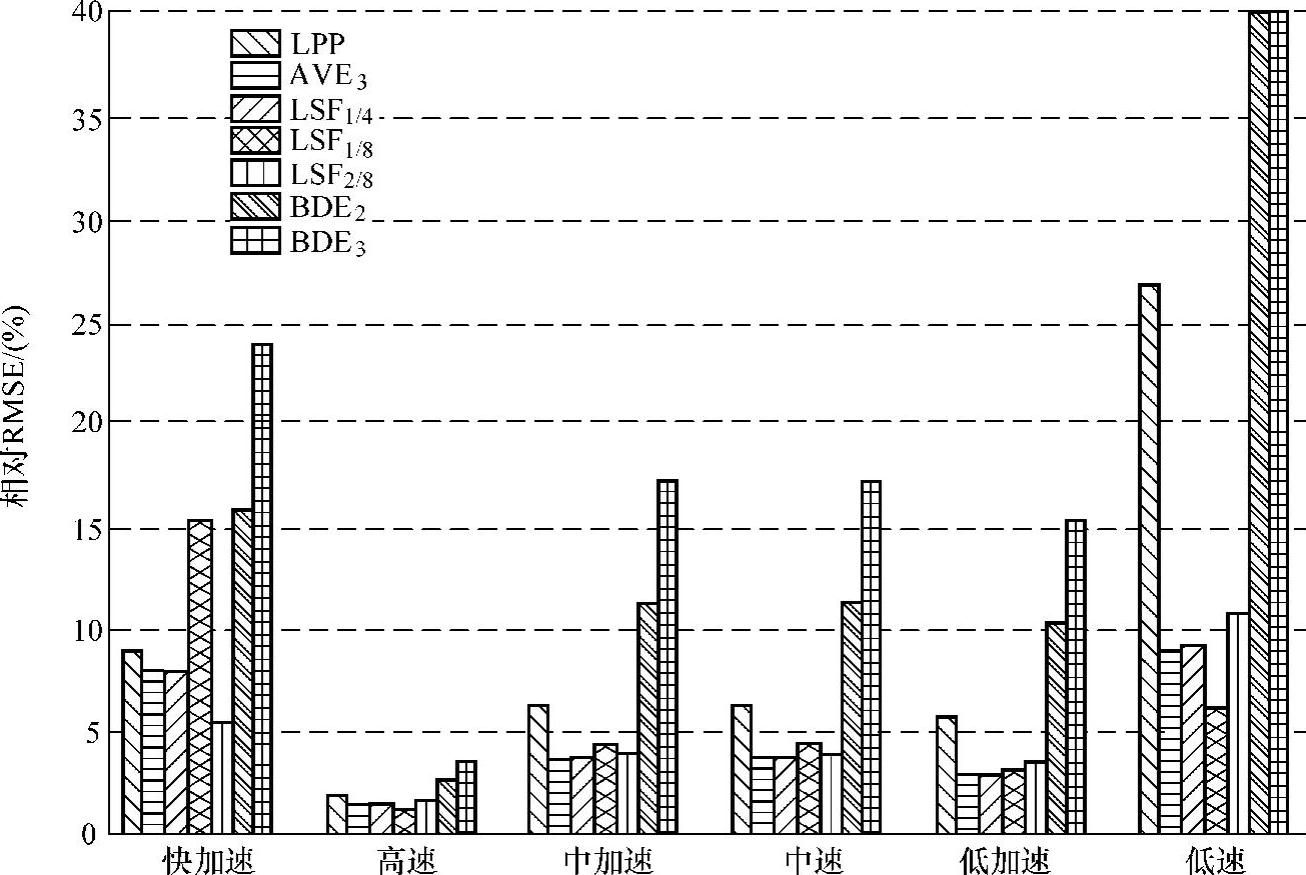
图9-15 基于表9-2参数的7种FIR数字滤波器在6种条件下转速估计的RMSE
7种方法中的6种情况按式(9-37)计算,得到结果如图9-15所示。由图9-15可得到一些重要结论:
①BDE估计不应该被采用,因为它在各种情况下工作都不是很好;
②LSF1/8除了在快加速方面,其他情况下效果不错;(https://www.xing528.com)
③从实际角度考虑,AVE和LSF的方法可行。
接着像IIR或s域滤波器那样,对它们进行频响特性分析,如图9-16所示。由图9-16又可得到一些重要结论:
①BDE法有凸峰(除了LPP),且衰减很差,低通滤波特性明显不好;
②LSF法和AVE法在带阻处都有波动,似乎前者比后者明显,LSF1/4与AVE3特性接近;
③LSF法的高阶(例如LSF2/8)可能会引起凸峰;
④LSF法同阶比较(LSF1/4和LSF1/8),M值越小,带宽越宽,衰减越慢;反之,M值越大,带宽越窄,衰减越快,综合起来,LSF1/8较优于LSF1/4。
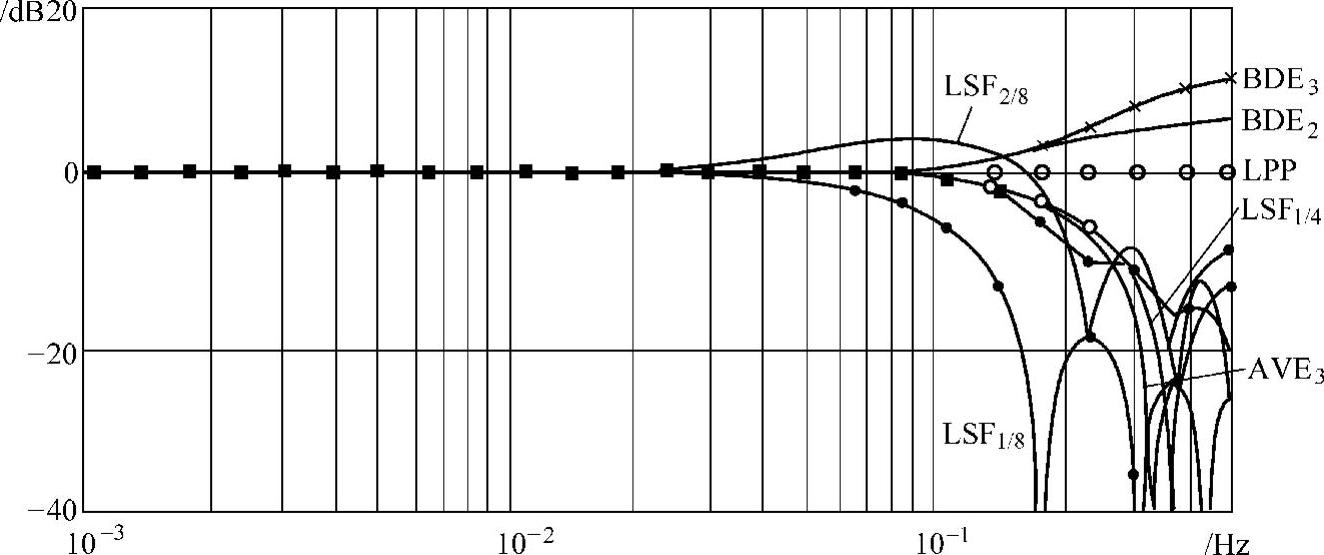
图9-16 7种FIR滤波结构频响特性分析
因此,综合以上两类分析结果,最后得出结论为:BDE法估计不应该被采用;尽可能避免使用对称结构的FIR,例如LSF2/8,因为在转速快速响应时,这种结构的滤波器带来的延时可能对系统稳定裕度要求较大;理想的转速估计滤波器是类似LSF1/8,并且滤波产生的延时最好为半个采样周期。
下面有必要再提及一下基于AVE法实现的FIR滤波器,因为许多设计者都使用过它们,尤其是在平滑数据时(因而也常常称它们为滑动平均滤波器),可是并不熟悉它们在z域的特点,于是对阶数的选择总存在想当然。实际上,一个简单的FIR滤波器就是滑动平均滤波器,因为它的系数都相同,所以它也是最直观的滤波器之一,不同阶数的滑动平均滤波器在频域的特性如图9-17所示。图中显示了7种不同阶数的滑动平均滤波器,分别是3阶,5阶,10阶,20阶,50阶,100阶和200阶。
由图9-17可知,滑动平均滤波器是拥有次优带阻特点的低通滤波器。低阶数时,第一旁瓣与主瓣相比衰减小,但主瓣宽度较大;相反,高阶数时,旁瓣得到进一步抑制,可惜的是,主瓣宽度变得很小。表9-3列出了图中各阶数主瓣的归一化带宽和带阻衰减值。
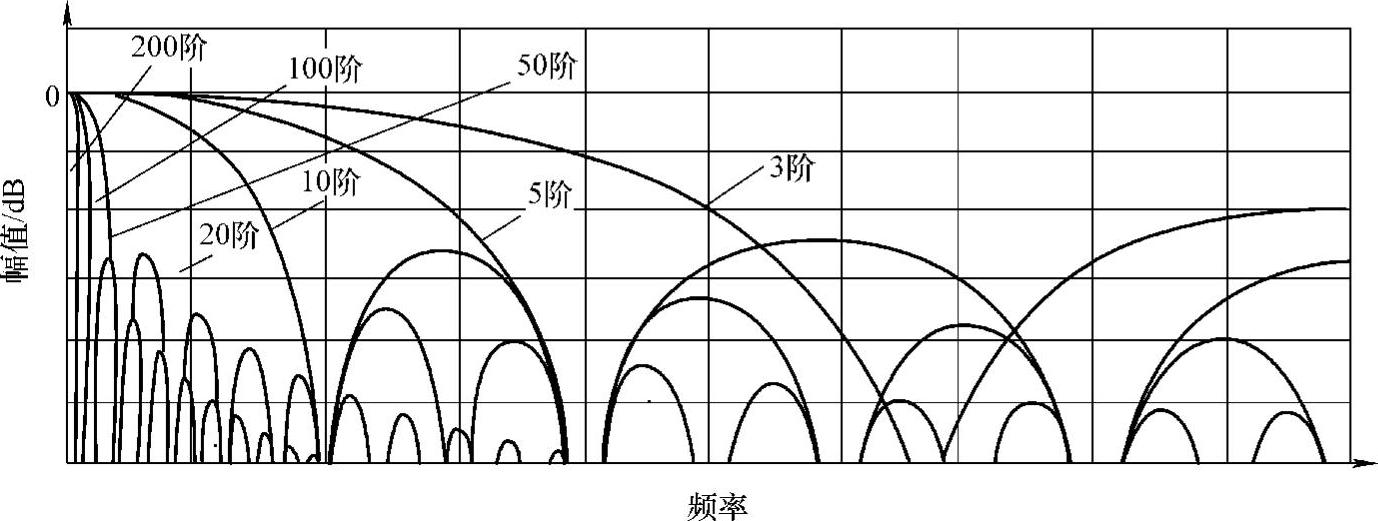
图9-17 滑动平均滤波器频响特性
表9-3 滑动平均滤波器归一化带宽和带阻衰减

因此,在使用时要注意合理选择阶数,保证滤波信号的通带要很好地落在它的通带范围内,这样可以保证只去掉噪声。
有时由于FIR滤波器需要的阶数较多,带来了很大的计算量,增加了过多的计算延时,这是它的主要缺点。例如要表示一个高阶滤波器特性,FIR滤波器需要几十个系数,然而IIR滤波器可能只有几个系数。为了尽可能地减少计算量,滑动平均滤波器的结构可改写为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。