



加速度反馈可以用来提高伺服系统的抗扰动能力,它的理想结构框图如图10-9所示。加速度反馈通过减缓电动机对被测加速度的响应来实现,测得电动机的加速度AM后乘以KAFB,反馈给电流指令,用来减小加速度(电流)指令。实际的加速度越大,电流指令被减小得越多,KAFB具有同增大转动惯量类似的作用。
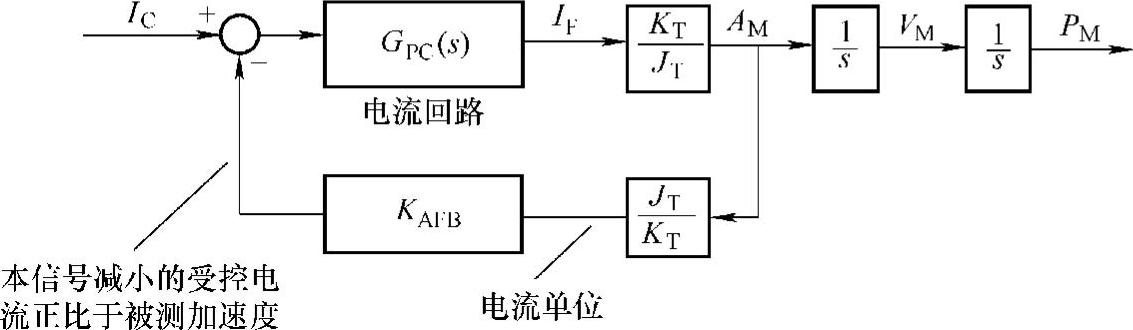
图10-9 理想化加速度反馈
通过图10-9的传递函数,很容易看到加速度反馈的作用。假设电流回路的动态性能是理想的,即Gpc(s)=1,于是得到输入输出传递函数为

从式(10-10)中很容易看到,加速度反馈的作用,对于KAFB>0的任何值,系数(1+KAFB)与增加总转动惯量JT具有相同的作用。
因此,反馈加速度主要作用就是增大有效转动惯量。但是,有效转动惯量的增加实际上减小了回路增益,也就减小了系统的响应速度。图10-10给出了解决方法。图10-10中,在控制回路中加入惯量增长量,也就是(1+KAFB),抵消了加速度反馈中的有效转动惯量,这时随着KAFB的增大,有效转动惯量增大,加速度反馈的优越性得到实现,由于回路增益固定,因此稳定性裕度和指令响应不变。
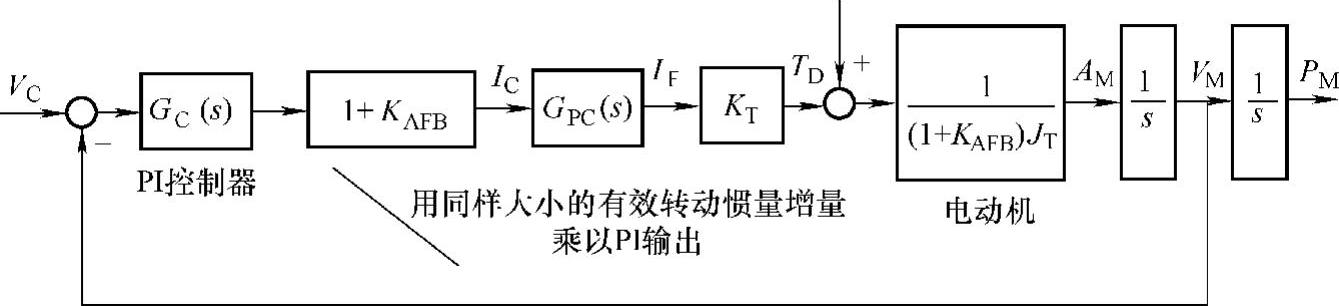
图10-10 基于理想化加速度反馈的速度控制器
这一点也能从系统的传递函数上看到。系统的指令响应传递函数为

式中,没有出现KAFB,因此指令响应不受KAFB值的影响。
通过加速度反馈能改善图10-10所示的扰动响应。系统的扰动响应传递函数为(https://www.xing528.com)

对于式(10-12)的理想化情况,扰动响应的改善是在整个频率范围内获得的,且正比于(1+KAFB)。遗憾的是,这样的一个结果是不现实的。排除电流环带宽的限制,加速度反馈的最大限制是难以测量加速度。虽然有工业用加速度传感器,但是很少有哪种应用能承受得起价格上的增加以及由于增加传感器以及其引线带来的稳定性降低。对于这个问题,一种解决方法是观测加速度,而不用测量加速度。因此,加速度只能在观测器结构力所能及的范围内进行观测,这就限制了式(10-12)的理想结果所能实现的频率范围。
对于许多单独使用加速度传感器不太现实的系统,观测加速度是加速度反馈的一个合适的备选方法。伺服系统中基于观测器的加速度反馈如图10-11所示。加速度回路用观测加速度 构成闭环,速度回路用观测速度
构成闭环,速度回路用观测速度 反馈构成闭环。
反馈构成闭环。
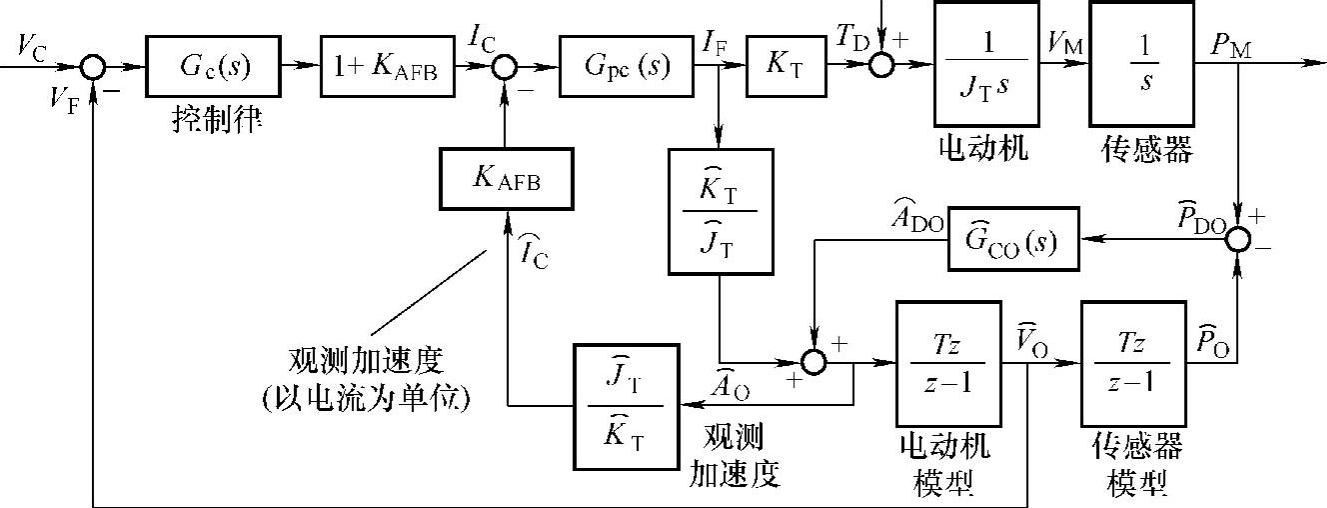
图10-11 伺服控制系统中基于观测器的加速度反馈
图中, 把电流回路的输出IF转换为加速度单位,又把观测加速度
把电流回路的输出IF转换为加速度单位,又把观测加速度 通过
通过 和KAFB转换为电流单位,并形成(1+KAFB)项用于抵消乘以控制律输出的(1+KAFB),这与图10-10是一致的。
和KAFB转换为电流单位,并形成(1+KAFB)项用于抵消乘以控制律输出的(1+KAFB),这与图10-10是一致的。
基于图10-11搭建计算机仿真环境,由于扰动定义为正符号,故而使得系统在加入阶跃信号后,转速不是跌落而是超调。对TD加入阶跃扰动后,得到仿真结果如图10-12所示。由图形分析得到,在没有加速度反馈时(见图10-12a),通过对Gc(s)中的控制律设置尽可能高的增益,并且速度反馈由观测器观测速度信号获得,是能够改善抗扰动性能的。当加入加速度反馈后(见图10-12b),对扰动的改善会是很明显的,可见加速度产生了巨大的作用,当KAFB越大,抗扰能力越强。
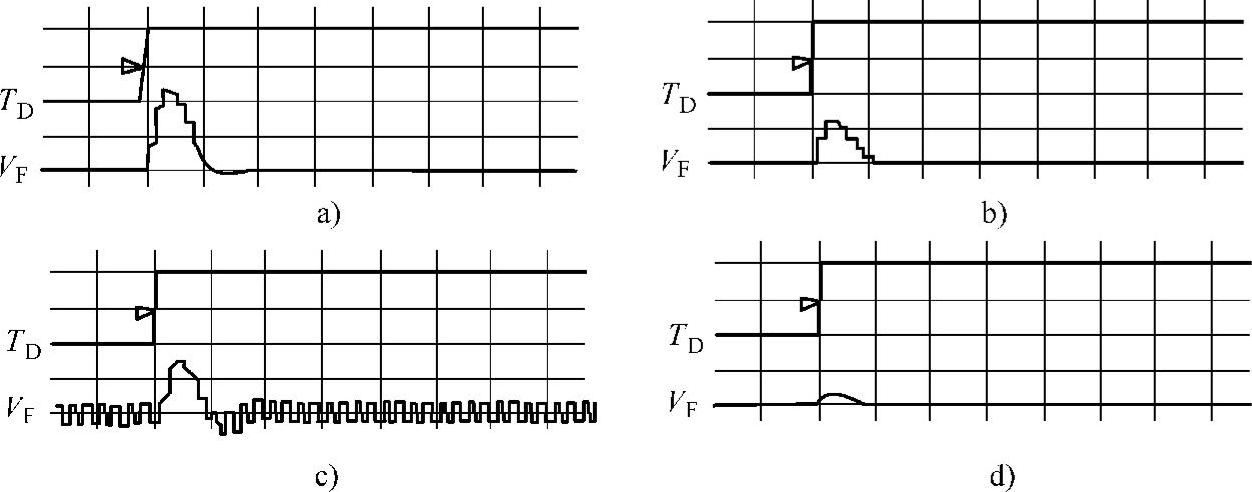
图10-12 有无加速度反馈情况下对阶跃扰动的响应
a)KAFB=0 b)KAFB=1 c)KAFB=10 d)KAFB=10
但是出于观测器的稳定性限制,过大的KAFB会引起系统的不稳定(见图10-12c),通过减小观测器的采样时间解决了这个问题(见图10-12d)。需要指出的是,采样时间的改变在模型中很容易实现,但是在实际系统中则可能很难。因此,实际系统中设置的KAFB值要比仿真模型中得到的值小得多。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。