



【摘要】:B.9.2 通过精确线性化的非线性控制设计考虑如下一个单输入、单输出n阶非线性控制系统:我们假设系统的相关度是r=n,那么这个系统可以被变换成一个可控的线性系统其中矩阵A和B是Brunovsky标准形式,Z和v分别是状态变量向量和控制变量。
精确线性化控制设计原则,是把一个非线性控制系统精确线性化成一个可控的线性系统,并根据线性控制系统,得到状态的非线性反馈控制律;把得到的控制律转换回原有的非线性空间,就会得到原控制系统的非线性控制设计。
B.9.1 精确线性化的条件
为了引进精确线性化的条件,我们需要介绍下面的定理:Frobenius定理
考虑下面的偏微分方程组:
式中∂h(X)/∂X是h(X)的梯度向量;[Y1(X)Y2(X)…Yk(X)]是在X空间定义的n维向量场。
假设矩阵[Y1(X)Y2(X)…Yk(X)]在X=X0有阶k。当且仅当增广矩阵[Y1(X)Y2(X)…Yk(X)[Yi,Yj]]在X0邻域对所有的X仍有阶k时,在X0的Ω邻域一定存在式(B-4)的n-k个标量函数解,使雅可比矩阵∂h(X)/∂X在X=X0有阶n-k。
Frobenius定理提出的条件实际上是向量场[Y1,Y2,…,Yk]对合性的条件。
B.9.2 通过精确线性化的非线性控制设计
考虑如下一个单输入、单输出n阶非线性控制系统:
我们假设系统的相关度是r=n,那么这个系统可以被变换成一个可控的线性系统
其中矩阵A和B是Brunovsky标准形式,Z和v分别是状态变量向量和控制变量。
利用非线性状态反馈,可以产生线性化:(https://www.xing528.com)
式中
α(X)=Lfnh(X)
β(X)=LgLfn-1h(X)
而且微分同胚坐标变换:
在式(B-6)中,线性系统最优控制是
v*=-BTP*Z(t)
其中P*是Riccati矩阵方程的解。
考虑到坐标变换Z=Φ(X),我们可以得到以下的非线性控制律:
Brunovsky标准形式给出如下:
式中 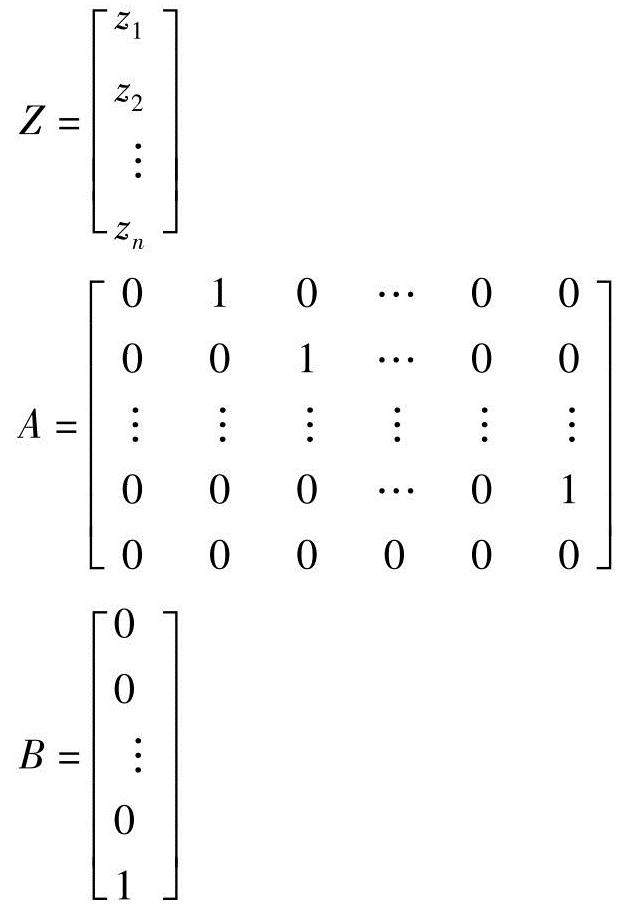
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。