



1965年,美国的控制论专家扎德(L.A.Zadeh)教授提出模糊性概念,创立了模糊集合论。又在1968~1973年期间先后提出语言变量、模糊条件语句和模糊算法等概念和方法,使得某些以往只能用自然语言的条件语句形式描述的手动控制规则可采用模糊条件语句形式来描述,从而使这些规则成为在计算机上可以实现的算法。
1974年,E.H.曼达尼和S.阿西里安成功地把这种想法应用于小型汽轮机的控制,开拓了模糊控制的方向。此后,模糊控制方法迅速得到推广,被应用于热交换器、水泥窑、交通管理等许多领域。
PLC模糊控制是一系列模糊控制技术的一种。它的核心是利用模糊集合理论,把人的控制策略的自然语言,转化为PLC的知识库(使用模糊控制单元时,建立的数据库存于该单元的内存中)及程序,以便在PLC运行程序时,能模拟人的思维方式,对一些无法构造数学模型的被控对象进行有效的控制。
PLC模糊控制目前用的还不算太多。专用的控制单元,见到的似乎仅欧姆龙等少数公司才有。但是,即使无这种特殊单元,用模糊控制的算法,去设计PLC控制程序则是不受限制的。图4-52所示为模糊控制的基本原理。
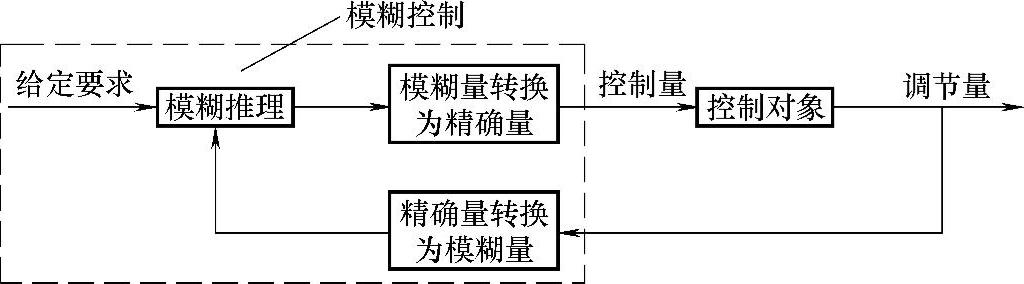
图4-52 模糊控制原理图
从图4-52可知,模糊控制也是闭环控制,它也要不停地检测控制对象的输出(调节量)。但它要把输入这个精确量,转换为模糊量(称模糊化),进而利用输入输出间的模糊关系进行模糊推理。模糊关系就是基于人们,特别是专家的经验,所形成的一系列规则(大前提)。模糊推理把检测到的模糊输入(小前提)与模糊关系结合进行判断,以给出控制对象应得到的控制。只是这个结论也是模糊的。要把这个结论用作控制量,还需把它转换为精确量(称解模糊)。
可知,这里模糊控制就是根据系统输出的误差和误差变化情况来决定控制量。在手工操作情况下,这项工作原来是由控制人员通过手动控制完成的。把它们的经验表述为一套自然语言的条件语句,再应用模糊集合论将其转化为一组模糊条件语句,就可用来组成模糊控制规则。例如,对于由下述语句表述的经验规则:“如果误差很大,且误差继续朝不利方向很快变化,应加大控制量;如果误差大小为中等程度,且朝着有利于减小误差的方向变化,应使用很小的控制量来使误差继续减少。
模糊控制的特点是不需要考虑控制对象的数学模型和复杂情况,而仅依据由操作人员经验所制订的控制规则就可构成。凡是可用手动方式控制的系统,一般都可通过模糊控制方法设计出由PLC可执行的模糊控制程序。模糊控制所依据的控制规律不是精确的。其模糊关系的运算法则、输入精确量到模糊量的转换,以及输出模糊量到实际控制量的转换等,都带有相当大的任意性。对于模糊控制的性能和稳定性,常常难以从理论上做出确定的估计,只能根据实际效果评价其优劣。
以下举一个洗澡水温度控制实例,看看模糊控制是怎样进行的。
洗热水澡时,洗澡水一般应是“暖和”的。暖和与不暖和,虽然可用洗澡水的温度衡量,但不好硬性地说,从多少度到多少度之间的洗澡水是暖和的,而其它温度的洗澡水就不是暖和的。因为,洗澡水这个暖和的温度特征不是很清晰的,而是模糊的。
所以,在不同温度的洗澡水中,哪些属于暖和,哪些属于不暖和,不好用17世纪康德创立的集合论那样,去精确地划分。而要用札德提出模糊集合的概念处理。
在这里札德引入“度”的概念。这个“度”不是温度的度,而是模糊集合中隶属度的度(Grade)。对某人、某季节可这样假设,如40℃时,用作洗澡水正好是“暖和”的,则设其隶属度为1.0(100%)。而35℃,或45℃呢?就不那么正好了,设其隶属度为0.5(50%)。低于20℃就太凉了,设其隶属度设为0。而高于60℃就太热了,也设其隶属度也设为0。有了这几个特殊温度点隶属度的假设,其它温度时,洗澡水属于暖和的隶属度则可从图4-53a得知了。
有了这个图,即可把不同温度的洗澡水,本来是精确量的温度量,变换为使人们能予以感觉的模糊量,即模糊子集“暖和”,并用“隶属度”反映其模糊程度。
显然,这个从温度的“度”到这里的“度”的转换,完全是凭经验得出的。
除了“暖和”,还有“太凉”“凉”“热”“太热”等也都是模糊的概念,也可有对应的模糊子集。其隶属度分别与温度的关系如图4-53b所示。
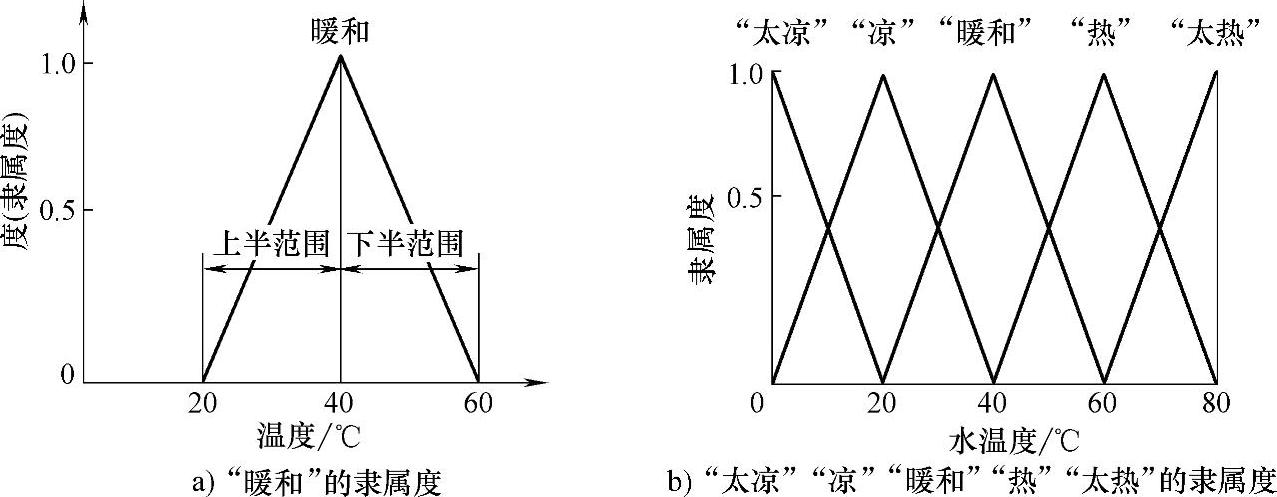
图4-53 隶属度
这里各模糊子集的隶属度与温度的关系都是线性的,分别为“Δ”,或半“Δ”型。也可为别的形,到底怎样,可依经验确定。
有了图4-53,可很容易地把有精确温度值的水的状态,转换为一些,如“暖和”“凉”“热”等模糊子集,精确量的模糊化就有依据了。(https://www.xing528.com)
要使洗澡水达到“暖和”的要求,可依水的状态,凭经验是,拧动水龙头。大体是:
洗澡水“太热”了,水龙头较多地拧向凉水增加方(ZLL);
洗澡水“热”了,水龙头拧稍向凉水增加方(ZL);
洗澡水正好“暖和”,水龙头不动(ZO);
洗澡水“凉”了,水龙头拧稍向热水增加方(ZR);
洗澡水“太凉”了,水龙头较多地拧向热水增加方(ZRR)。
这里“水龙头较多地拧向热水增加方”等结论也是模糊的。它与输出水龙头转角这个精确量间的关系如图4-54所示。
这里各模糊集合的隶属度与输出水龙头转角的关系是垂直形。也可为别的形,到底怎样,也是根据经验确定。
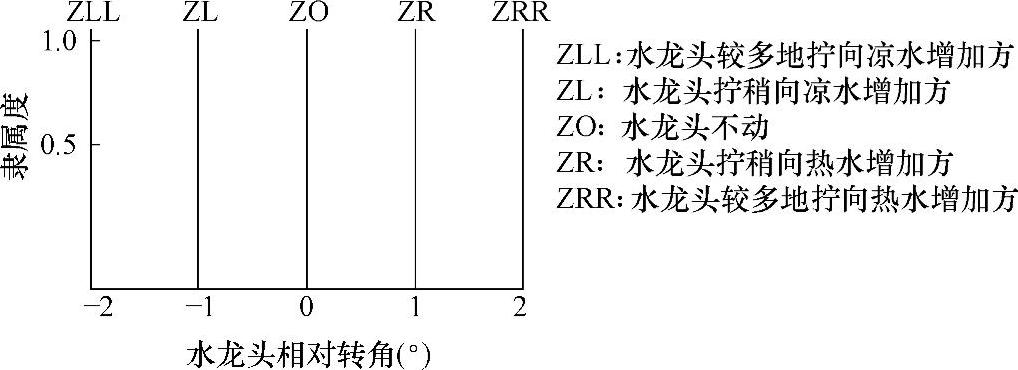
图4-54 水龙头拧向隶属度
有了这些,可以看看,怎样从检测到的实际温度,去控制水龙头的相对转角的。
如检测的温度这正好是40℃,那只有“暖和”的隶属度为1,其它的均为0。依上述规则,其结论,应为“水龙头不动”(隶属度为1)。而“水龙头不动”(隶属度为1)对应的相对转角正好0。
如检测的温度是35℃,那“暖和”的隶属度为0.75,“凉”的隶属度为0.25,其它的均为0。依上述规则,其结论,应为“水龙头不动”,隶属度为0.75;“水龙头稍拧向热水增加方”,隶属度为0.25。这时转角多少呢?
有两处理个方法:
1)选隶属度大者输出。如本例“水龙头不动”,隶属度大。选它,其对应的则是水龙头相对转角为0°。
2)依隶属度加权平均确定输出。即
水龙头相对转角=0.75×0°+0.25×1°=0.25°
从以上介绍可知,不管检测到的温度是多少,总可计算出与其对应的水龙头相对转角。因此,用这种模糊控制原理是可实现控制的。至于控制的效果如何,正如PID控制要选好PID参数那样,也要确定好输入量到模糊集的转换、控制规则及模糊量到输出的转换。
提示:模糊控制没有用什么精确的公式,也没有什么微分方程。是用基于经验总结出的语言型规则进行控制。其控制机理及策略很易理解,设计简单,应用简便。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。