



由于电力电子器件的存在,逆变器的数学模型具有高阶、时变、非线性和强耦合的特点。针对逆变器的这些特点,其控制策略总体上可分为两大类。一类是线性控制策略。线性控制策略的基本思路就是将逆变器的数学模型线性化,再经降阶、解耦,使其简化为较简单的线性系统,使用通用的线性控制理论实施控制。另一类是非线性控制策略。非线性控制策略则不需要提取逆变器的数学模型或者是不必对其数学模型进行线性化,而是直接给出非线性的控制方法。在工程实际中,线性控制策略使用得更多。
线性控制策略中最常用的控制技术就是PI控制。对于一个线性的控制对象G(s),采用控制器Gc(s)对于进行闭环控制,其原理框图如图5-20所示。根据图5-20,可得到其闭环传递函数为

误差量的象函数为

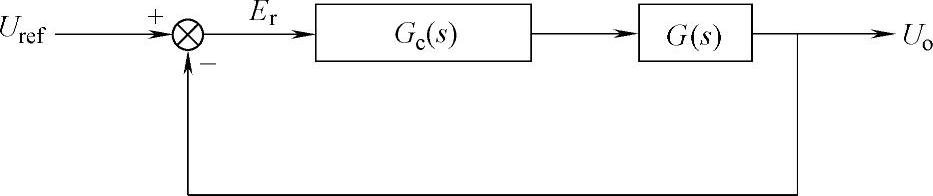
图5-20 线性控制原理框图
一般而言,对于典型信号如阶跃信号、斜坡信号和抛物线信号,往往利用拉普拉斯变换终值定理对系统稳态误差进行量化分析。但是,利用终值定理求解稳态误差终值的前提条件是sEr(s)在s平面的右半部及虚轴上除了坐标原点是孤立点以外,其他点必须全部解析,即sEr(s)的全部极点除坐标原点外应全部分布在s平面左半部。
对于逆变器而言,其输出电压指定量为交流量Uref(t)=sin(ωt),其对应的象函数为 。可见Uref(s)在s平面的全部虚轴上不解析,导致sEr(s)不满足上述条件。因此不能采用终值定理求解交流量的稳态误差。(https://www.xing528.com)
。可见Uref(s)在s平面的全部虚轴上不解析,导致sEr(s)不满足上述条件。因此不能采用终值定理求解交流量的稳态误差。(https://www.xing528.com)
从线性系统叠加定理和频域角度出发,可以按以下方法求解交流量控制的稳态误差。假设给定量为交流量sin(ω0t)。在频域中,其只在频率ω0处有幅频响应,在其他频率处的幅频响应均为0。根据复变函数理论和式(5-68)可知误差的幅频特性|Er(s)|也为0,而在频率ω0处Uref(s)幅频特性为1(即交流信号幅值)。因此若要实现误差的零稳态幅值误差控制,则必须满足

也即

对于一般性的G(s)来说,只有当 时式(5-70)才能成立。也就是说,零稳态误差控制的条件是控制器Gc(s)在交流给定量频率ω0处有无穷大的增益。
时式(5-70)才能成立。也就是说,零稳态误差控制的条件是控制器Gc(s)在交流给定量频率ω0处有无穷大的增益。
最常见的线性控制器PI控制器Gc(s)=kp+ki/s(kp和ki分别为比例和积分系数)可实现直流量的零稳态误差控制。其原因是PI控制对于直流量输入(相当于ω0=0)的增益为|kp+ki/0|,具有无穷大增益。而对于交流量,PI控制在交流量频率ω0处的增益为|kp+ki/jω0|,不具有无穷大特性,因此不能实现交流量的零稳态误差控制。当然kp或ki越大,交流量控制的稳态误差越小,但系统的稳定裕度也将变小,过大的kp或ki将导致系统不稳定。
解决PI控制不能实现交流量零稳态误差控制的问题,有两种基本思路:一种思路是设法将交流量变换为直流量,这样就可以应用PI控制实现零稳态误差控制,这种方法需要进行坐标变换,因此可称为坐标变换法;另一种思路是采用其他的控制器,这里通称为非坐标变换法。
上面谈到的是线性控制策略。非线性控制策略也有很多,比如滞环控制、变结构控制等。下面对上述控制方案分别进行介绍。同时,前面提到的逆变器控制都是假定直流侧电压稳定情况下对交流侧实施的控制策略,而在光伏发电系统中,由于光伏阵列输出的随机性,这个假定并不能保证。因为直流侧的波动会在交流侧引入低次谐波,导致波形畸变,因此必须对其进行有效抑制,本节的最后将对直流侧的控制策略进行分析和介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。