



(1)创建轴系
打开随书光盘中的钻床摇臂组件(Exercise\5\5.3.3&2.3\zuanchuangyaobi.CATPro duct),参见图2-30;或自行建立与之类似的可用于创建圆柱运动副的3D模型组件。
进入“开始(Start)”→“机械设计(Mechanical Design)”→“装配件设计(Assembly Design)”工作台,完成钻床摇臂的静态装配。针对“基于轴的接合(圆柱)”的运动副,其轴系的正确创建应使两坐标原点共同位于机构圆柱副的中心轴线上,且轴系的Z轴与圆柱副的运动中心轴重合。
本节所选实例中两零件圆柱运动副的中心轴与三维坐标平面存在一定距离,如图5-22所示,故需要调整底座及摇臂两零件的轴系原点坐标值。
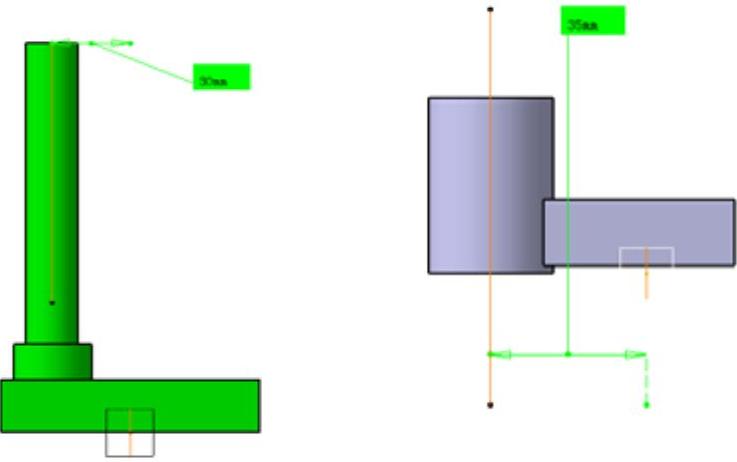
图5-22 距离值显示
参考5.2.2节及5.2.3节的内容,在底座上构建坐标值为(30,0,0)的点,并以此点为原点创建一个轴系,同时调整Z轴为运动方向所在轴。
同样,对摇臂构建点并对创建轴系进行调整,点坐标为(0,-35,0)。完成后结构树及机构中的轴系如图5-23所示。
本例若不构建点,则运动副创建完成后会出现“因过分约束而无法创建接合(The creationof the Joint is impossible because the mechanism is over-constraint)”的提示或在删除部分约束后机构并不能按预想效果的运动,如图5-24a所示。若不使Z轴与圆柱副的中心轴重合,则会出现非预想效果的运动,如图5-24b、c所示。
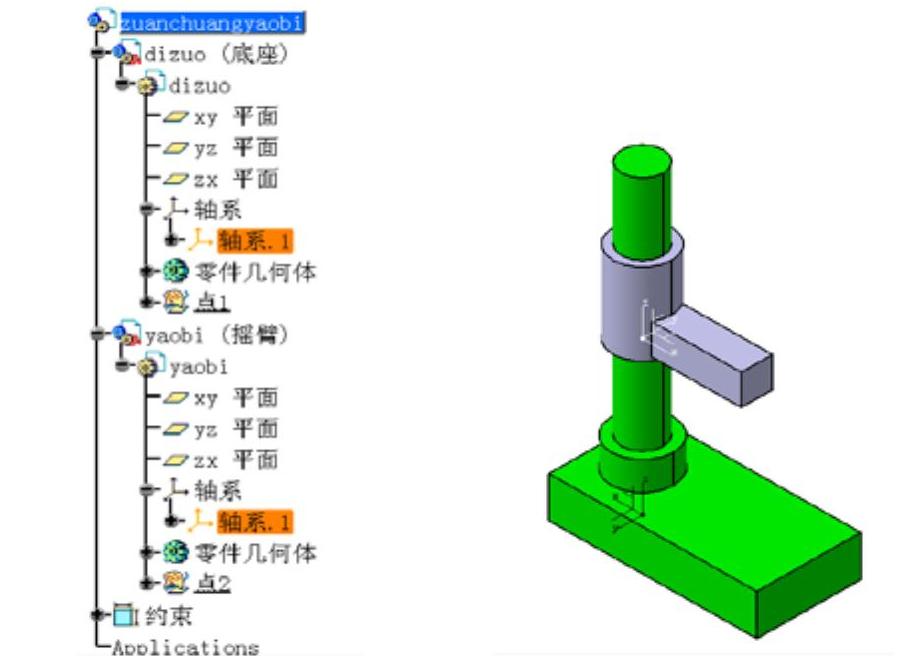
图5-23 机构生成轴系
对于未完成静态装配的“基于轴的接合(圆柱)”的3D模型组件,机构创建完成机械装置后将自动归位,使Z轴重合的状态为运动初始位置。
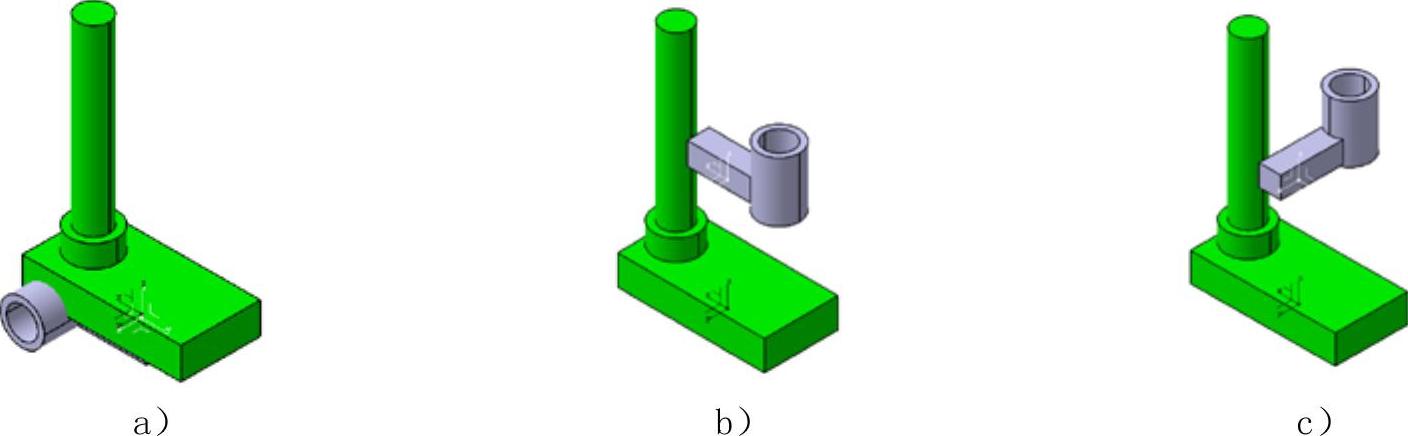
图5-24 非预期效果显示
(2)创建圆柱运动副(https://www.xing528.com)
①切换至“开始(Start)”→“数字化装配(Digital Mockup)”→“DMU运动机构(DMU Kinematics)”工作台。在“运动机构(DMU Kinematic)”→“运动接合点(Kinematics Joints)”工具栏中单击“基于轴的接合(Axis-based Joint)”图标 ,显示“创建基于轴的接合(Creation Axis-based Joint)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示(参见图5-10)。
,显示“创建基于轴的接合(Creation Axis-based Joint)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示(参见图5-10)。
②在“接合类型(Joint Type)”选项栏中选择目标运动副,本例为“圆柱(Cylindrical)”,如图5-25所示。
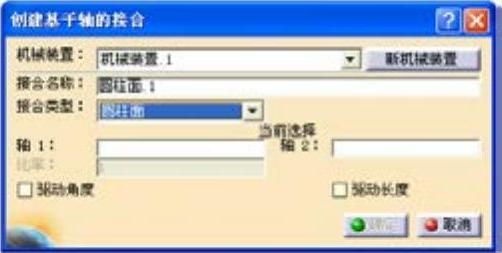
图5-25 选择接合类型
③分别选中在“底座”及“摇臂”上创建的两个轴系,对话框更新显示,如图5-26所示。
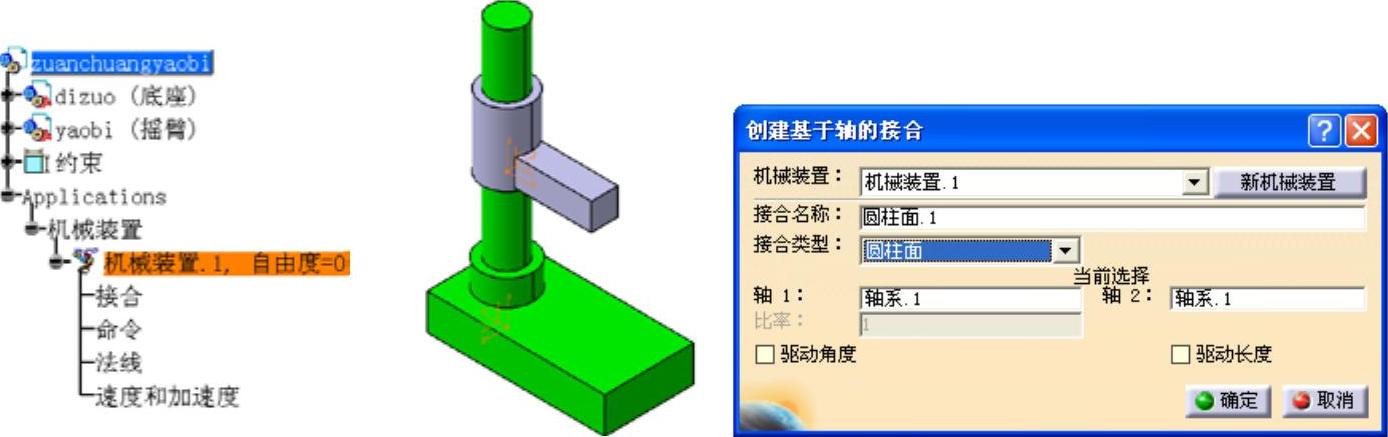
图5-26 选择轴系
④单击“确定(OK)”,完成“基于轴的接合(圆柱)”的运动副的创建,在结构树上可以看到在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下显示“圆柱.1(Cylindrical.1)(底座,摇臂)”,如图5-27所示。
(3)机构驱动
参见“2.3.3机构驱动”,运动机构建立完成后如图5-28所示。
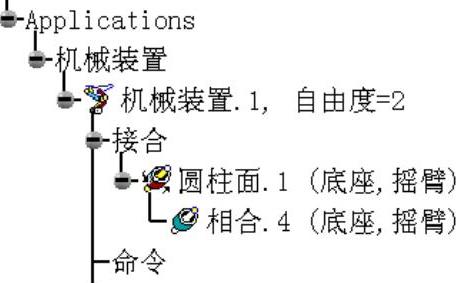
图5-27 结构树生成圆柱运动副
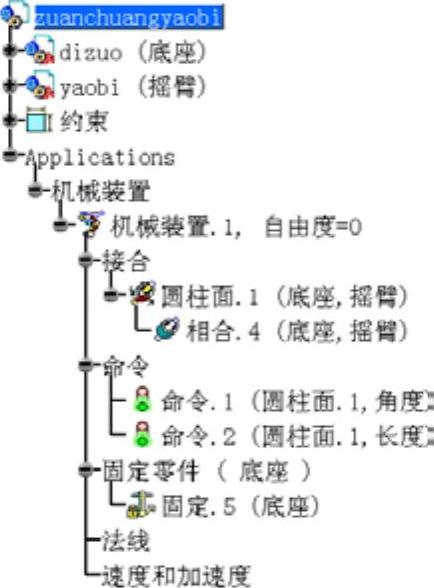
图5-28 基于轴的圆柱运动副
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。