



图7-6 选中驱动命令
导入十字轴万向节传动机构(Exercise\7\7.1-2&8.6.1\wanxiangjiechuandong.CATProduct),展开结构树上的“机械装置.1(Mechanism.1)”节点,并进一步展开“命令(Commands)”,选中已定义的“命令.1(Command.1)(旋转.11,角度)”,如图7-6所示,被选中的命令在结构树上突出显示。
在工作窗口底部的“知识工程(Knowledgeware)”工具栏中单击“公式(Formula)”图标 ,显示“公式:命令.1(Formulas:Command.1)”对话框,如图7-7所示。
,显示“公式:命令.1(Formulas:Command.1)”对话框,如图7-7所示。
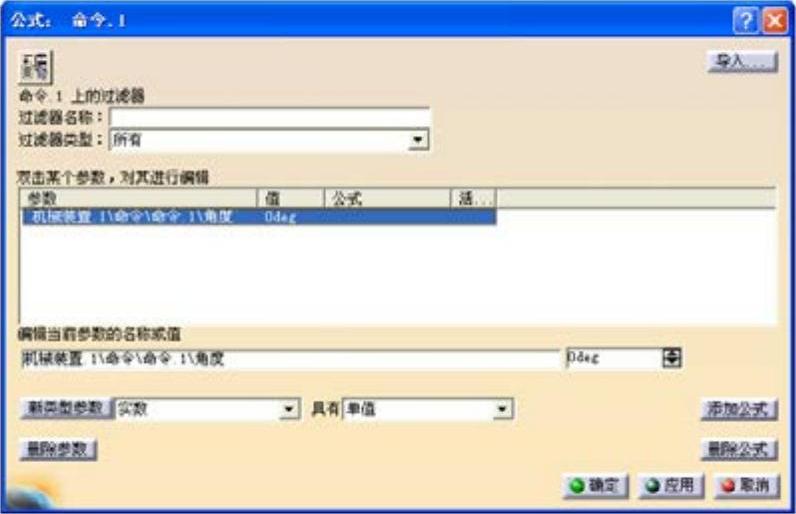
图7-7 公式对话框
单击对话框中的“添加公式(Add Formula)”按钮,或双击对话栏中“机械装置.1\命令\命令.1\角度……0deg”,对话框变为“公式编辑器(Formula Editor)”对话框,如图7-8所示。
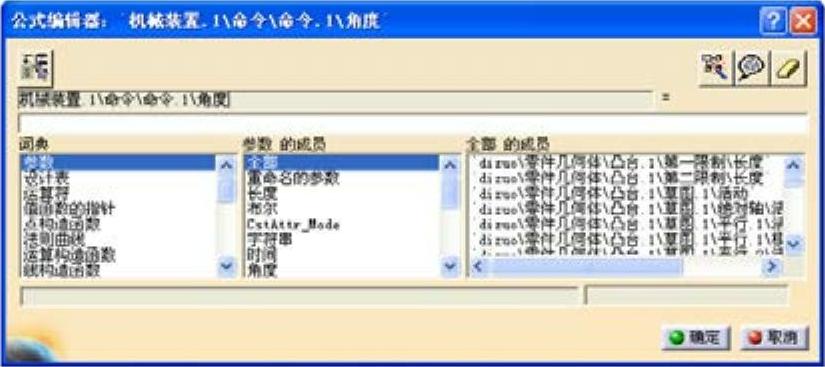
图7-8 公式编辑器对话框
“公式编辑器(Formula Editor)”对话框的展开也可以按以下操作方法进行:
双击结构树上的“命令.1(Command.1)”,或按图7-9选中“命令.1(Command.1)”后按“右键”→“命令.1对象(Command.1Object)”→“定义(Definition)”的路径,弹出“编辑命令(Command Edition)”对话框。
在对话框“命令值(Command Value)”显示栏中单击右键显示选择条,如图7-10所示。在选择条中单击“编辑公式(Formula Edit)”,弹出“公式编辑器(Formula Editor)”对话框。
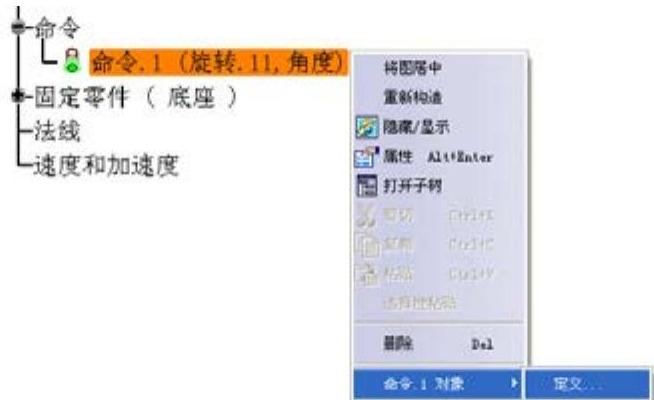
图7-9 展开编辑命令对话框路径
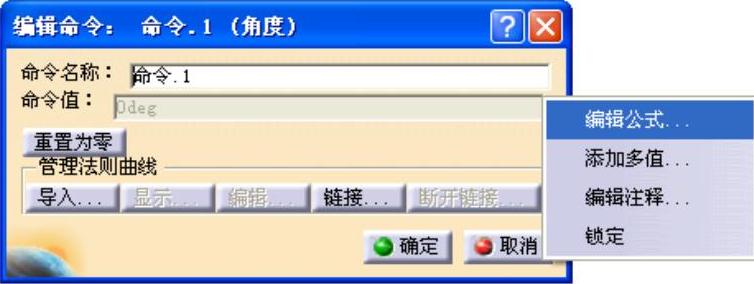
图7-10 展开公式编辑器对话框方式
在“公式编辑器(Formula Editor)”对话框的“参数的成员(Members of Parameters)”列表中选择“时间(Time)”,对话框更新显示,如图7-11所示。(https://www.xing528.com)
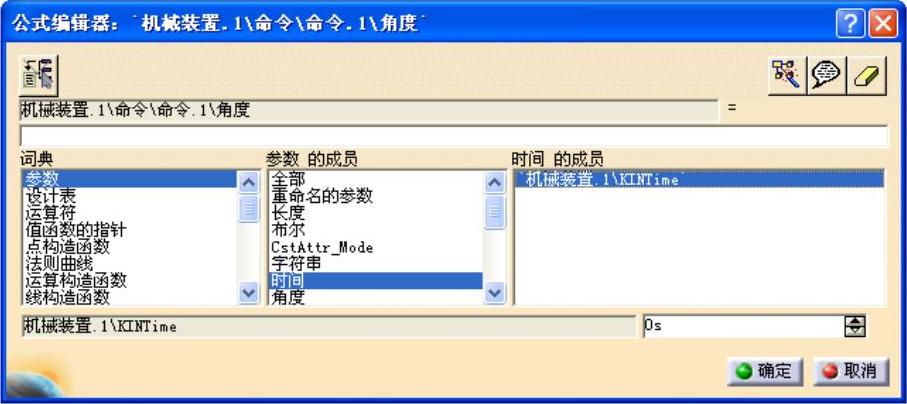
图7-11 公式编辑器对话框更新显示
双击已更新对话框“时间的成员(Members of Time)”列表中的“机械装置.1(Mechanism.1)\KINTime”,将其装载入对话框中的运动函数编辑栏,如图7-12所示。
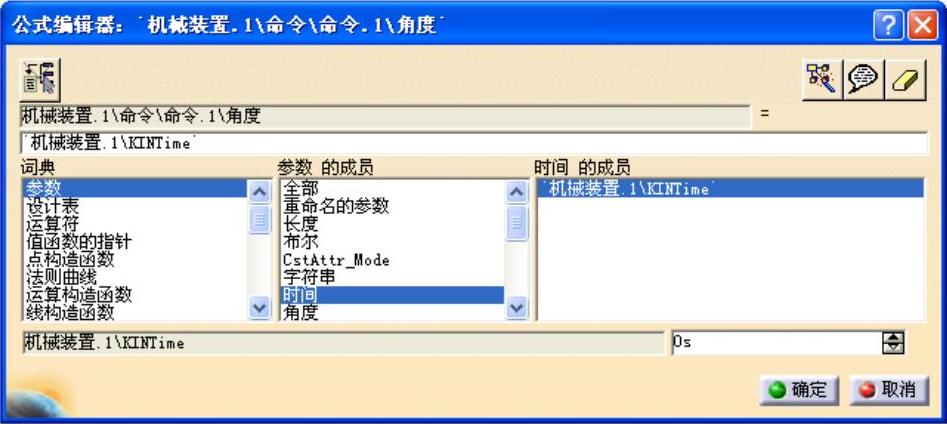
图7-12 装载参数
在编辑栏“机械装置.1\KINTime”的后面键入“/1s*10deg”,形成“机械装置.1\命令\命令.1\角度=`机械装置.1\KINTime`/1s*10deg”的函数式,如图7-13所示。
函数式规定了“命令.1(Command.1)”驱动的零部件每秒种旋转10º。角度单位也可以使用“rad”,但需注意与“deg”单位的大小不同。运动方向的调整通过计量单位的正、负来实现。如在编辑栏“机械装置.1\KINTime”后键入“/1s*-10deg”,则表示运动部件的速度为每秒钟向相反的方向旋转10º。
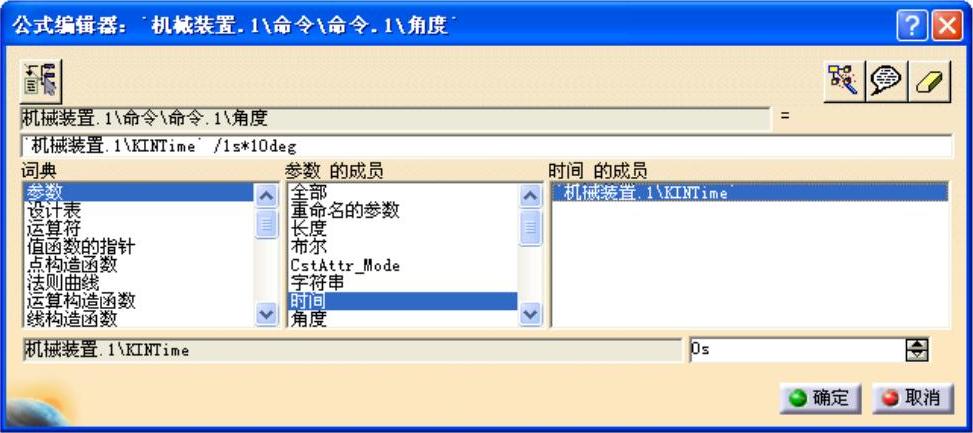
图7-13 输入数据
单击“确定(OK)”,退出“公式编辑器(Formula Editor)”对话框,回到“公式(Formula)”对话框,如图7-14所示。
单击“确定(OK)”,关闭“公式(Formula)”对话框,结构树上“法线(Laws)”节点下显示“公式.1:`机械装置.1\命令\命令.1\角度`=`机械装置.1\KINTime`/1s*10deg”的运动函数,如图7-15所示。
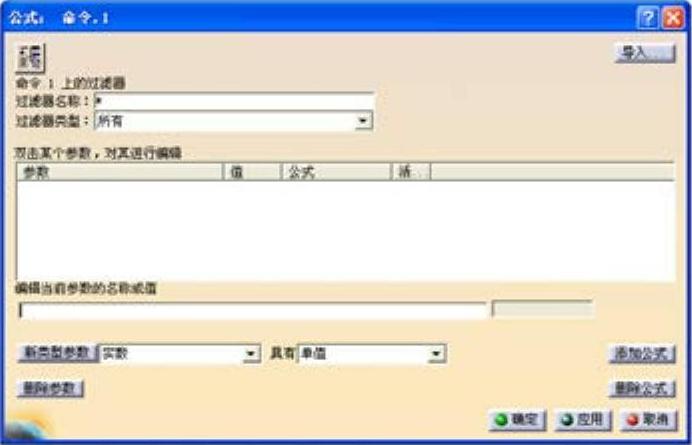
图7-14 公式对话框更新显示

图7-15 结构树上的运动函数
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。