



单波束测深仪一般采用较宽的发射波束,因为是向船底垂直发射,因此声传播路径不会发生弯曲,来回的路径最短,能量衰减很小,通过对回声信号的幅度检测确定信号往返传播的时间,再根据声波在水介质中的平均传播速度计算测量水深。而在多波束系统中,换能器配置有一个或者多个换能器单元的阵列,通过控制不同单元的相位,形成多个具有不同指向角的波束,通常只发射一个波束而在接收时形成多个波束。除换能器中央波束外,外缘波束随着入射角的增加,波束倾斜穿过水层会发生折射,要获得整个测幅上精确的水深和位置,必须要精确地知道测量区域水柱的声速剖面和波束在发射与接收时船的姿态和船艏向。因此,多波束系统在测量时比单波束测深仪要复杂得多。
多波束水下地形测量是一种具有高效率、高精度和高分辨率的水下地形测量新技术,具有范围大、速度快、精度高、记录数字化以及成图自动化等优点。随着近代计算机技术、高精度定位技术以及数字化电子技术的快速发展,利用多波束在海洋测绘中应用越来越广泛,作用也越来越大。多波束水下地形测量技术完全满足当前对海底地形测量的新需求,国际海道组织(IHO)在1994年9月摩纳哥会议上制定了新的水深测量标准,规定高级别的水深测量必须使用多波束全覆盖测量技术。而海缆路由勘察的地形测量属于工程精细测量,目前大部分海缆路由勘察在区域环境(水深等)许可内都要求采用多波束水下测量,以保证地形测量数据的可靠性。
3.2.2.1 工作原理
多波束系统利用换能器基阵产生并发射指定方向声波信号,波束在不同角度能量不同,具有一定指向性,换能器基阵包含多个直线或曲线排列的发射器,由波束间的相互干涉方式可以确定换能器基阵的指向性,得到预定方向的波束信号。每个波束信号都包含主叶瓣、侧叶瓣和背叶瓣,主叶瓣集中了波束的主要能量,实际测量过程中,系统尽可能聚集主叶瓣信号强度,抑制侧叶瓣和背叶瓣干扰信号,即换能器基阵的束控,多波束系统采用相位加权和幅度加权两种方法进行基阵束控,图3-6为波束束控示意图。
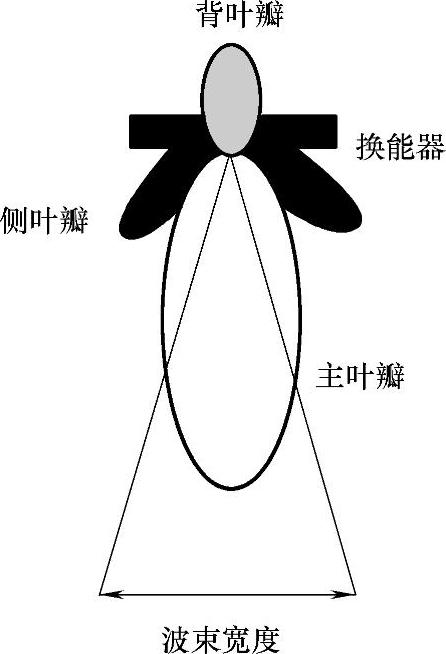
图3-6 波束束控示意图
为了能够使换能器同时发射多个波束,就要在换能器的设计制造上加以考虑。现有的多波束系统,都是用很多个换能器单元,按一定的排列方式组成一个换能器阵列,每个单元都有导线连出,并加以封装,从而组成多波束换能器阵列。每个独立的换能器单元,都是由压电陶瓷块组成的,它是利用压电陶瓷的压电效应工作的。当给压电陶瓷两极加上一个电压时,压电效应使压电陶瓷产生压力,从而产生一个随外加电压变化而变化的声波。若此外加电压为一频率较高的交变电压,则压电陶瓷便会产生高频振动,形成高频振荡声波。反过来,若是压电陶瓷两侧受到高频振荡声波的冲击,也会产生一个高频振荡电压。压电陶瓷实质上是一声电转换器件。多波束换能器就是利用了压电陶瓷的这种压电效应进行工作的。
多波束系统以一定的频率发射沿航迹方向窄而垂直航迹方向宽的波束,形成一个扇形声传播区。多个接收波束横跨与船龙骨垂直的发射扇区,接收波束垂直航迹方向窄,而沿航迹方向的波束宽度取决于使用的纵摇稳定方法。单个发射波束与接收波束的交叉区域称为足印(Footprint)。一个发射和接收循环通常称为一个声脉冲(Ping)。一个Ping获得的所有足印的覆盖宽度称为一个测幅(Swath),测幅在给定水深下对海底的覆盖宽度是噪声水平和海底反向散射强度的函数。每个足印的回声信号包含两种信息:通过声信号传播时间计算的水深,以及与信号的振幅有关的反射率。图3-7、图3-8为多波束测深系统发射和接收波束示意图。
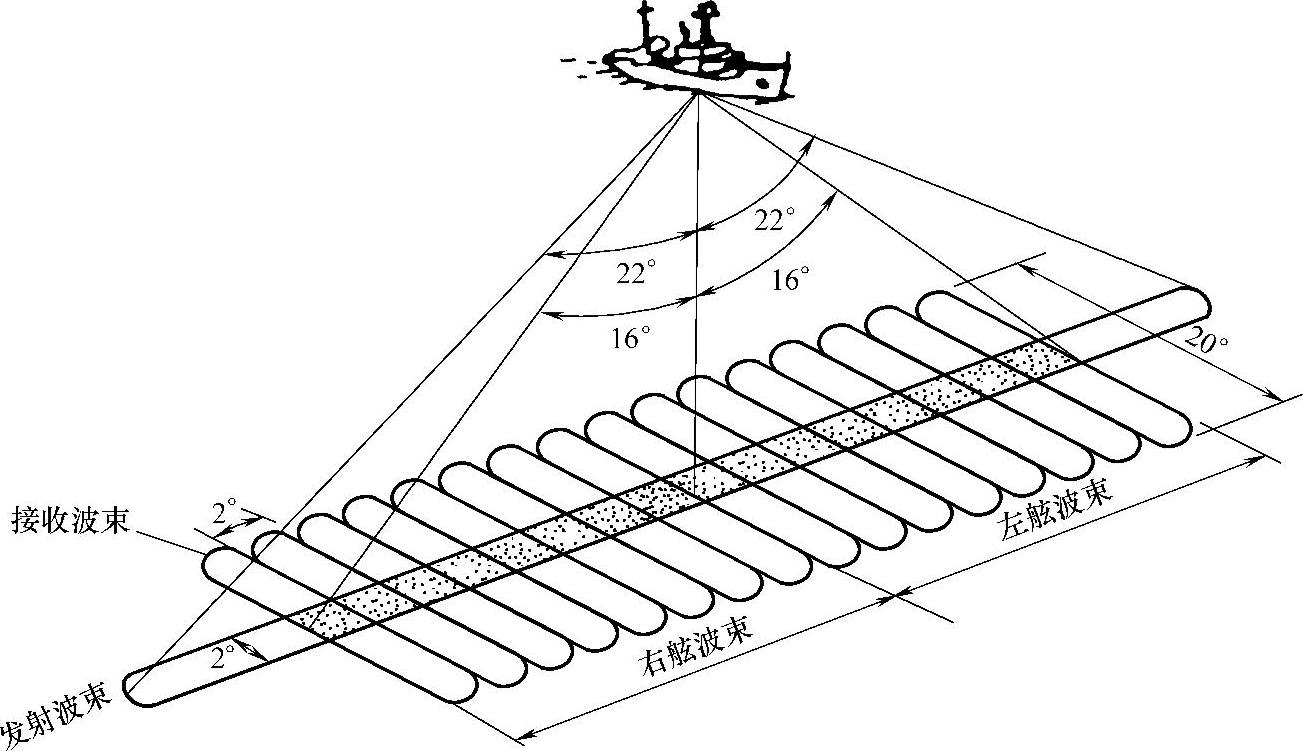
图3-7 多波束系统工作原理示意图
多波束系统记录每次波束的往返时间,根据声速剖面记录确定该波束的实测水深值;与此同时,多波束系统还记录了波束的振幅信息即回波强度,每次测量后,在与海底的交线上得到一组回波强度的时序观测量。多波束测深系统按一定工作频率通过发射和接收声波信号:信号处理电路接收发射多个波束的信号,包括发射角和船姿参数,信号处理电路计算发射信号和波束数,传送到多通道变换器,形成多个波束,波束信号再经过前置放大电路将功率放大,形成多个脉冲信号,最后经过收发转换电路,由换能器发射阵列向水下发射波束声波经海底反射后由换能器接收阵列接收,前置放大电路进行信号放大,数据釆集电路与控制电路相结合,进行两次信号采集完成波束信号接收。实时数据处理工作站接收操作检测单元采集的波束信号,进行数据存储和声呐影像记录,与此同时,工作站还接收来自外围设备的检测信号,包括导航和定位数据,姿态传感器的船体横摇、纵摇、升沉姿态数据,电罗经检测的航向数据以及声速剖面仪采集的声速剖面信息。工作站将接收采集的各类数据转送至后处理系统,后处理系统包含数据处理软件和绘图软件。数据处理软件进行数据存储,对测量数据进行数据整合,如数据改正、数据编辑、数据排查滤波等,最后由制图软件将处理后的测量数据生成海底地形图像。
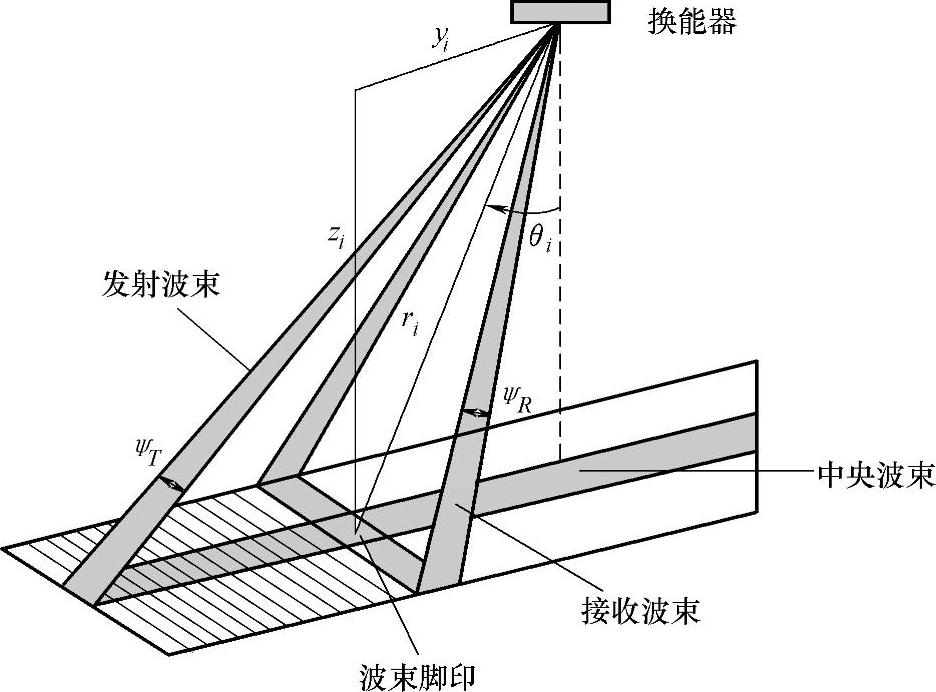
图3-8 多波束测量中波束的几何构成
多波束发射和接收回波信号,实现深度和回波强度的测量,还有其中一个重要环节就是底部检测。随着波束入射角的增大,波束脚印面积也在增大。波束角较小时,波束脚印面积较小,波束能量集中,回波信号以反射为主,随着波束角逐渐增大,波束脚印面积较大,回波信号呈现散射特征。为了精确检测边缘波束信号,多波束系统同时采用了振幅检测和相位相干技术,对于中央波束区,振幅检测可以获得主要反射波强度,对于边缘波束区,相位相干测量技术可以检测到明显的相位变化,提高多波束测量精度的同时改善了内测量精度不均匀问题。因此,新型的多波束系统在底部检测中同时采用了振幅检测和相位检测,不但提高了波束检测的精度,同时也改善了ping断面内测量精度不均匀所造成的影响。
3.2.2.2 系统组成
多波束系统基本上是由三个部分组成,如图3-9所示。第一部分是多波束的主系统,主要包括换能器阵列、收发器和处理单元等;第二部分是辅助系统,包括定位系统、船姿(横摇、纵摇、起伏和船艏向)测量传感器和测量水柱声速剖面的声速仪;第三部分是后处理系统,包括数据处理计算机、数据存储设备和绘图仪等。
主系统由用于水下声呐发射与接收的换能器、中央处理单元和操作工作站组成。一般的多波束系统都包括发射换能器和接收换能器,由发射换能器发射声波脉冲,经水体传播、水底或水中物体反射后,由接收换能器分别对接收到的声呐信号初步处理后,经电缆传送给中央处理单元。中央处理单元发送控制指令进行釆集信息,接收导航与定位、姿态传感器与罗经等来自外围设备的数据以及操作工作站的控制指令。操作工作站是一台计算机系统,包含系列软件,用于系统管理和数据采集、预处理、显示以及水深、海底图像、船位船姿、声速和系统安装参数等数据的存储。
辅助系统主要由定位系统、声速剖面仪、表层声速仪、运动传感器、时钟(1PPS)以及用于参考的单波束测深系统组成,用于提供位置数据、声速剖面、船体姿态(如横摇、纵摇、俯仰、升沉等)、波束往返时间等参数信息。为了提高测量可靠性和精度,多波束测深系统需同时连接定位系统和运动传感器系统。
后处理系统是一台后续处理工作站,包含各种后处理软件。利用后处理软件对测量数据进行处理,可生成所需要的水深图、三维图、综合地形图、声学影像图和底质分类图等。
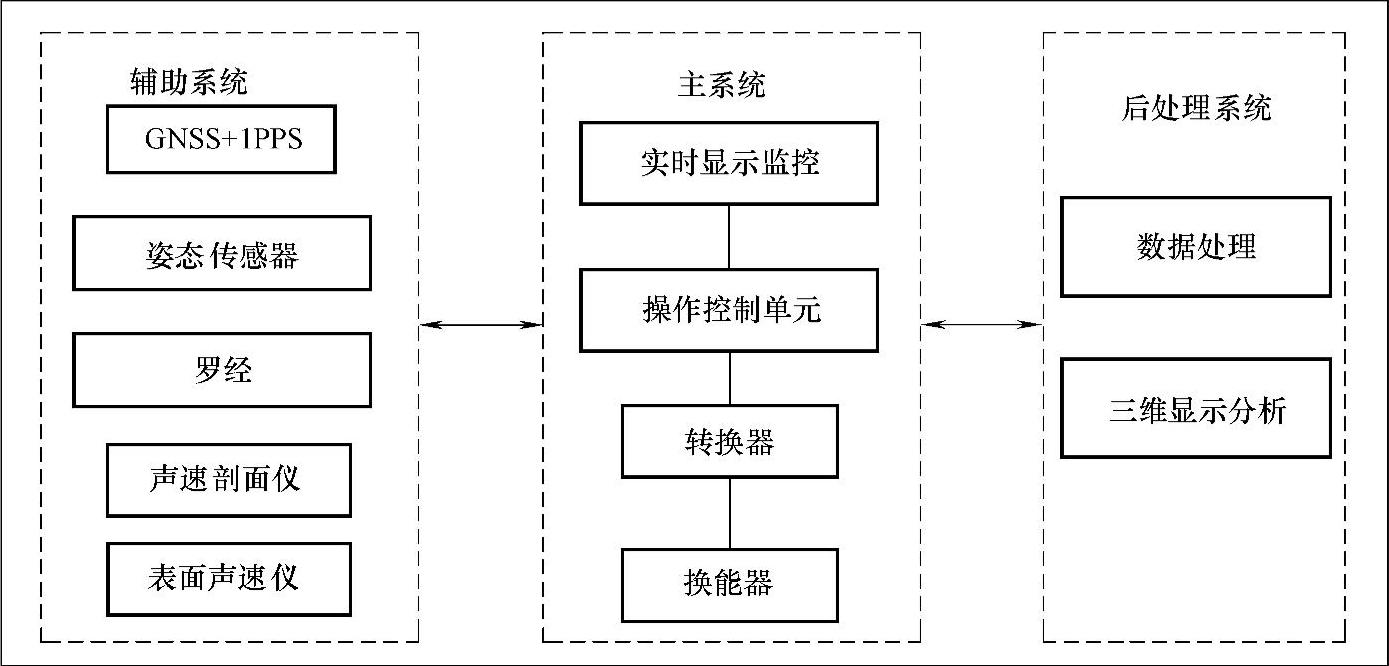
图3-9 多波束系统组成示意图
3.2.2.3 分类
自多波束测深系统问世以来,生产和销售多波束条带测深仪产品的厂商有几十家,先后推出的产品也有上百个型号,种类也比较繁杂,一般可以从频率、测深量程和发射波束等方面进行分类。
(1)按频率分
按工作频率可分为高频、中频和低频三类,一般高于180kHz为高频,36~180kHz为中频,低于36kHz为低频。
(2)按测深量程分
按测深量程可分为浅水、中水和深水三类,一般浅水指0~500m量程,中水指500~3000m量程,深水为大于3000m量程。
(3)按发射波束分
根据波束形成的使用方法不同,多波束测深系统可分为相干法和束控法。束控法是通过相控技术进行发射,一次只能向一个方向发射信号,采用旋转发射技术,发射与接收波束方向通过运动传感器补偿后达到一致。相干法是指发射机发射短脉冲一次完成扫描海底,接收器按一定的相位差接收海底回波信号。声学子系统同时记录回波时间获得回波波束的方向,求得海底测点的垂直深度和横向距离。
3.2.2.4 工作程序
1.外业资料采集
(1)多波束仪器安装的原则要求
1)多波束测深系统换能器应固定安装在噪声低且不容易产生气泡的位置,并应保证换能器在工作中不露出水面。
2)系统发射接收接线盒尽量靠近换能器,且接线盒位置至少要高于船体吃水线。
3)艏向测量仪应安装在测量船的艏艉(龙骨)线上,参考方向指向船艏。
4)定位天线一般安装在多波束测深系统换能器顶部位置,如无法安装则应精确测量定位天线与换能器的相对偏差,并输入偏差进行校正。相对偏差应≤0.05m。
5)运动传感器一般应安装在船体重心位置或靠近重心的位置。
(2)换能器姿态校正
海上试验应包括参数测试和水深测量准确度检验。其中,参数测试是按先后顺序分别为横摇偏正、定位时间延迟、纵摇正和艏向正参数的测试。参数测试完成后,应进行水深测量准确度检验。(https://www.xing528.com)
1)横摇偏差改正(Roll)。横摇偏差一般是由多波束测深系统换能器安装偏差、运动传感器安装偏差组成。通常情况下,当多波束换能器和运动传感器固定安装时,这种偏差是一个常量。多波束测深系统如果存在横摇偏差,则在平坦海域进行测量时,垂直航迹方向的地形剖面就会发生倾斜。
做横摇改正时,一般在平坦海底海域或平直斜坡海域(坡度应<2°)布设一测线,进行正反两方向测量。横摇偏差测试计算有坡度计算法和剖面重合法两种。两次测量后,把同一位置垂直航迹的地形剖面显示在同一视窗内,不断调整横摇偏差值,直至两个剖面重合。
2)纵摇偏差改正(Pitch)。纵摇偏差是由多波束测深系统换能器安装误差、运动传感器安装误差等组成。通常情况下,当多波束换能器和运动传感器固定安装时,这种偏差是一个常量。多波束测深系统如果存在纵摇偏差,则进行测量时,会产生沿龙骨方向的位置偏差。
做纵摇偏差改正时,一般选择在明显存在斜坡的海域,布设一条测线,测线长度应保证覆盖整个标志地物。在测线上,以相同速度进行正向和反向两次测量。两次测量后,把同一位置沿或平行航迹方向的地形剖面显示在同一视窗内,不断调整纵摇偏差值,直至两个剖面重合。
3)定位时间延迟改正(Time)。若多波束测深系统采用的时间与定位时间不同步,或者多波束测深系统与定位系统在相同时刻的定位信息不相同,则必然产生测量数据的位置误差,即测量位置沿航迹方向发生延迟偏移。
做定位时间延迟改正时,选择的测试海域海底应存在能被多波束系统勘测出来的标志地物,或者具有5°~10°的简单斜坡。在所选择的海域,布设一条测线,测线长度应保证覆盖整个标志地物。在测线上,保持匀速测量,而且第1次测量的速度(v1)与第2次测量的速度(v2)相差至少1倍以上。两次测量后,把在航迹方向上的地形剖面显示在同一视窗内,不断调整定位时间延迟值,直至两个剖面重合。
4)艏向偏差改正(Yaw)。艏向是通过艏向测量仪(如罗经等)获得的,多波束测深仪换能器安装方向的偏差、龙骨方向测量的偏差以及艏向测量仪基准方向的偏差等因素都会产生艏向偏差。多波束测深仪换能器安装方向的偏差,只要是固定安装,该方向偏差是一个常量(艏向偏差Ⅰ);龙骨方向测量的偏差以及艏向测量仪基准方向的偏差,就是艏向测量仪的测量偏差,只要艏向测量仪及其安装位置不改变,其测量偏差是一个常数(艏向偏差Ⅱ)。所以,多波束测深系统艏向偏差由艏向偏差Ⅰ和艏向偏差Ⅱ构成。由于多波束测深仪波束形成以及波束数据处理时,是以左右舷垂直船艏线的方向为基准方向的,艏向偏差将产生波束点位置和测量水深值的偏差,位置偏差的影响是以中央波束为中心,越往边沿影响越大。因此,应测定艏向偏差,并把该偏差作为参数对多波束测深系统进行校准。
做艏向偏差改正时,在标志地物两侧布设两条测线,在测线上,保持匀速测量,利用多波束测深系统的边缘波束覆盖标志地物,测线长度应保证覆盖整个标志地物。两次测量后,把标志地物处沿航迹方向上的地形剖面显示在同一视窗内,不断调整艏向偏差值,直至两个剖面重合。
(3)多波束水深测量
多波束水深测量是一种条带式测量,扫测的条带宽度约是水深的3~8倍,在测幅范围内,采取等距或等角波束模式发射和接收,使整个测幅内有相同的精度。测量时测幅之间相互重叠至少20%,从而保证了测区内的全覆盖测量。
根据技术要求,在多波束水深测量期间,根据水深变化、气象条件以及现场多波束水深数据质量的需要,需要进行声速剖面测量。一般每天至少需要做一或两次声速剖面,用来校准水深值。特殊区域视实际情况加密声速测量。
测量过程中,多波束数据采集主要由专业采集软件完成,比如Qinsy、PDS2000、Hypack和SIS等多波束导航采集软件,测量数据以专门多波束文件格式保存。现在的多波束采集软件都是基于工作站平台的,具有良好的人机交互界面。所有的测量数据可记录在与项目名相同的文件目录中,文件名包含了项目名称、测线名和开始采集时间,由计算机自动生成,不存在测线重名现象。数据保存采用硬盘介质存储,为了达到最佳测量效果,测量时对多波束系统实时监控,最大限度降低不合格数据的产生。
在实际作业中,不同设备的测区需有一定的重叠区域,一般为500m~2km,以保证不同调查船的数据完全覆盖,并同时可以进行数据对比,以保证不同调查设备的数据之间的误差满足符合国际航道测量组织(IHO)标准。
2.多波束测深资料处理及成图
多波束资料一般采用专业处理软件对多波束水深数据进行处理,目前比较常用的处理软件主要为加拿大Teledyne CARIS.Ins公司Caris HIPS and SIPS软件和荷兰QPS公司的Qimara、Qcloud软件。其内容包括位置校准、潮位改正、声速校正、数据清理等过程,最终输出修正后水深数据,同时结合其他制图软件(如ARC GIS、AutoCAD等)编绘等深线图。资料处理基本流程一般包括原始数据输入、定位处理、水深处理、数据滤清以及最后的输出,具体流程如图3-10所示。
定位处理:主要检查外业定位是否正常,航迹是否满足要求。
水深处理:包括换能器吃水深度改正、潮位改正、参数改正和声速改正。
其中,潮位变化对浅水区水深影响较大。多波束资料处理需要进行潮位改正,近岸一般采用潮位站数据,近海一般采用预报潮位和实测潮位相结合方式进行潮位改正,大于200m水深海域一般不进行潮位改正。由于各地受地形、水文、气象等因素的影响,各地潮位有差异和各自变化。水深测量的数据均根据项目需求利用潮位订正到要求的基准面。水深超过1000m区域,由于测量数据的误差超过了一般的潮位变化值,测量数据不用潮位校准。
数据滤清:利用计算机对数据自动滤清或者通过人机交互编辑准确剔除不良数据点。
准确度评估:资料经处理后,应对整个区域进行水深测量精确度评估,计算主测线和联络测线的在重复测点上的水深测量值的差值,统计均方差,作为水深测量准确度综合评估的依据。计算公式为
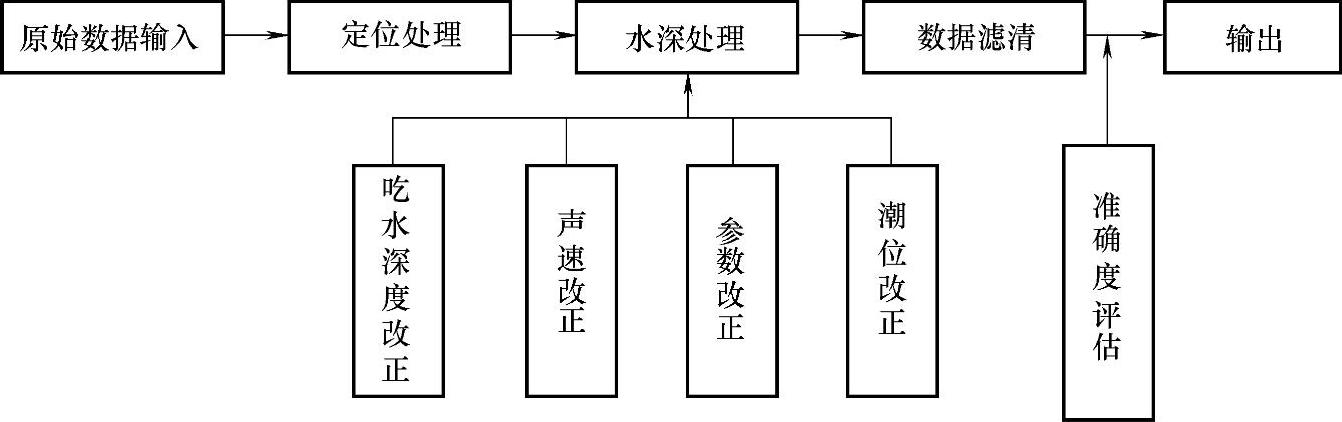
图3-10 资料处理基本流程
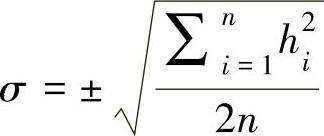
式中,σ为中误差,单位为m;hi为不同测线条幅重复测点水深测量值的差值,单位为m。
计算均方差时,允许舍去少数特殊重复点,但舍去点数不得超过总点数的5%。水深变化大的区域,可以按水深值分段计算。
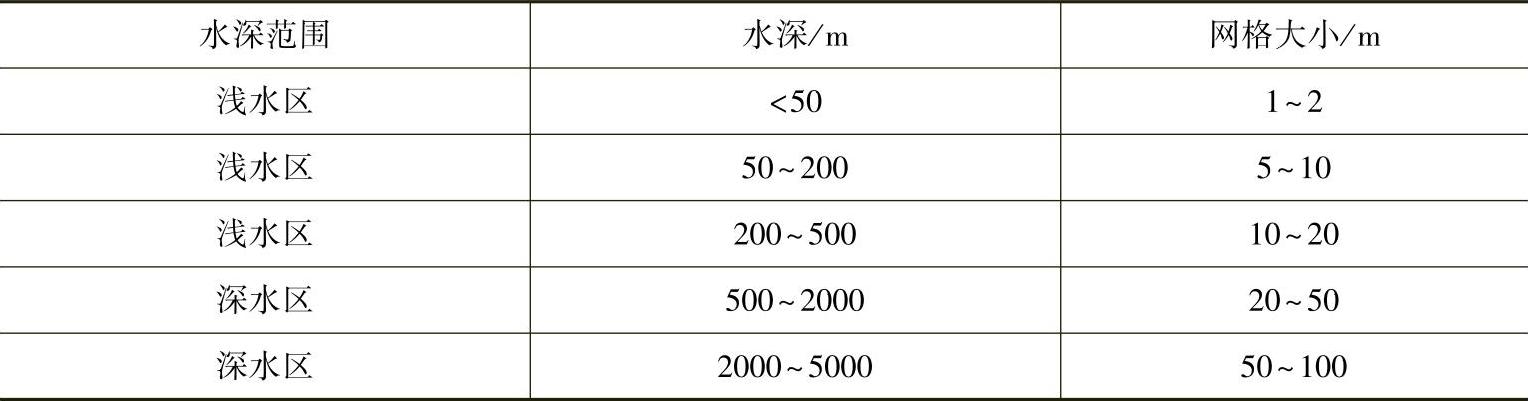
水深数据处理过程中,多波束后处理软件获得的水深数据需要进一步网格化成数字地形模型才能形成等深线图。根据路由宽度和成图技术要求,在不同水深,网格大小一般如表3-1所示。
表3-1 一般多波束测量各水深区DTM成果网格推荐大小
数字地形模型(Digital Terrain Model,DTM)是指表达地形特征的空间分布的一个规则或不规则的数字阵列,也就是将地形表面用密集点的x,y,z坐标的数字形式来表达。最初它被用于各种线路选线(铁路、公路、输电线)的设计以及各种工程的面积、体积、坡度计算,任意两点间的通视判断及任意断面图绘制。在测绘中,它被用于坡度坡向图、绘制等高线、立体透视图,制作正射影像图以及地图的修测。它还是地理信息系统的基础数据,可用于土地利用现状的分析、合理规划及洪水险情预报等。在海洋测绘数据量越来越大的今天,DTM应用也越来越广泛。DTM在水下地形测量主要有这几方面应用:等深线、海底地形可视化、海底地形分析、海底地表特征调查,特别是DTM可用3D技术展现水上水下地形数据。图3-11为多波束水下地形测量生成的DTM三维模型示意。
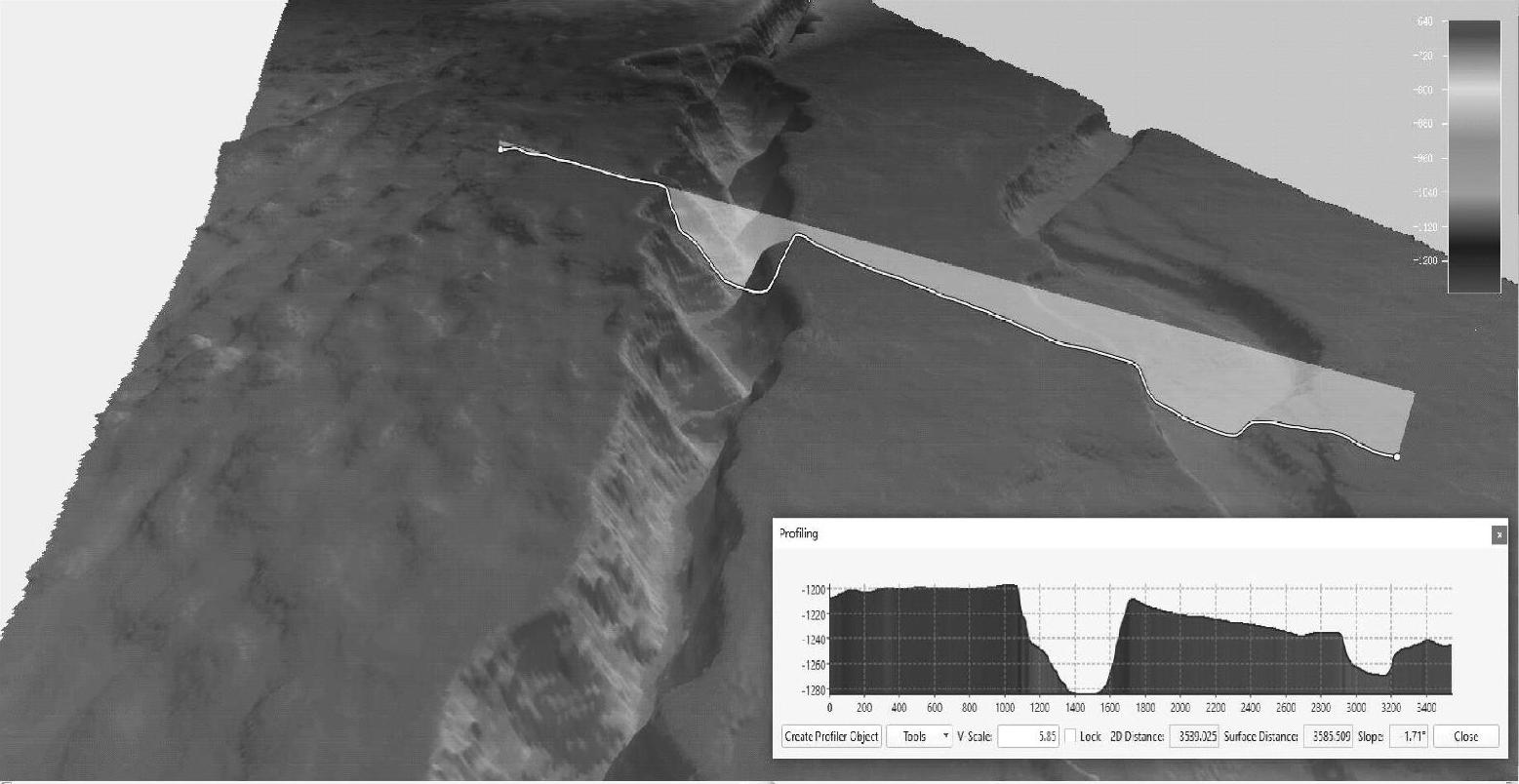
图3-11 多波束水下地形测量生成的DTM三维模型示意图
3.2.2.5 主要设备
多波束测深技术通过近30年的发展,其研究和应用已达到较高水平,也达到了一个比较成熟的阶段,特别近10年来,多波束测深技术取得了突破性的进展,主要表现为:①全海洋测量技术。现在多波束测深系统测深范围覆盖了从浅水到深水整个全海域,不但能用于河道测量、港湾测量、浅海测量,还能进行深海万米测深。②发展高精度测量技术。现在不管深水多波束还是浅水多波束大部分都采用振幅和相位联合检测技术,以保证测量扇面内波束测量精度的大体一致,设计新型系统使中央波束测点面积和边缘波束基本相近、测点距基本一致,保证中央波束和边缘波束分辨率的一致性。③浅水多波束向高密度、高精度、聚焦方向发展,同时具备高清晰成像功能,而且集成化越来越好,也越来越轻巧,也越来越多搭载在AUV、ROV、深拖、无人艇进行应用。④现在浅水和深水多波束都能进行水体数据记录和处理,拓展了系统的能力,水体信息对进行海底气体溢出、打捞以及海底生物研究都有一定的意义。
多波束水深测量的设备主要以水深划分,一般分为深水多波束和浅水多波束两大类。浅水多波束测量量程一般为500m以下,测量量程大于500m的为深水多波束。深水多波束又可以细分为三类:全海深深水多波束(最大量程11000m以上)、中深水多波束(最大量程7000m)和中浅水多波束(最大量程2000~3000m之间)。
深水多波束系统工作频率一般在12~30kHz,测量量程为10~10000m,系统的物理尺寸较大,一般至少是5m×5m以上,不适合在小船上安装。目前,市场上的深水多波束测深系统主要有挪威Kongsberg公司、德国ELAC公司、德国ATLAS公司和丹麦RESON公司这几家生产。
表3-2、表3-3、表3-4分别为这几家公司的11000米级、7000m级和2000~3000m级各级别的中深水多波束系统的技术指标,对比分析后可以看出以上几款多波束系统,除了在波束发射、数据采集能力、扫幅宽度等方面稍有差别,总体性能指标都能满足大部分测量要求,其他配置方面基本一致,包括了导航定位、运动传感器、表面声速和声速剖面等传感器和发射机控制机柜。在功能上也具有侧扫功能和水体探测功能,这些设备均处于国际使用前沿的设备。
浅水多波束系统一般选用100~400kHz频率,测量量程为0.5~500m,系统的物理尺寸较小,方便安装在小作业船上。主流浅水多波束的性能指标见表3-5。浅水多波束地形测量应用广泛,从大陆架浅水区测量到近岸测量,勘察、海洋环境调查都可以用浅水多波束调查任务,而浅水多波束由于频率较高,因此测量精度高,在海洋工程方面的精细测量的应用也是浅水多波束的主要应用方向。浅水多波束系统的主要生产厂家也是上述几家深水多波束厂家生产,如挪威Kongsberg公司生产的EM2040系列(EM 2040、EM 2040P、EM 2040C),美国R2sonic公司的R2sonic2000系列(R2sonic 2026、R2sonic 2024和R2sonic 2022等),丹麦Reson公司的Seabat系列(Seabat T50P、Seabat 7125、Seabat T20)以及Kongsberg公司的GeoS-wath Plus系列浅水多波束都是目前国内外的主流产品,但是近年越来越多的生产厂家包括国产厂家也都推出各自的浅水多波束系统,也都有不错的性能,使得浅水多波束系统有更多的选择。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。