



拖动系统能否稳定运行,是指当负载转矩增加或减小时,拖动系统是否能够在转速基本不变的情况下继续运行?
1.稳定运行区—AK段(见图3-13a)
假设拖动系统已经在Q1点运行:电磁转矩是TM1,转速是nM1。根据转矩平衡的原理,这时的电磁转矩和负载转矩之间一定是平衡的:
TM1=TL1→TJ=0
又假设由于某种原因,负载转矩由TL1增加为TL2,则因为
TM1<TL2→TJ<0
电动机带不动负载,动态转矩为‘-’,拖动系统减速。随着转速的下降,电磁转矩增大,如箭头①所示,当电磁转矩增大到TM2时,动态转矩为0,拖动系统又处于平衡状态,在新的工作点Q2继续运行,如图3-13a所示。这说明,在AK段,负载转矩的增加只是使拖动系统降低了一点转速,但拖动系统能够正常运行。
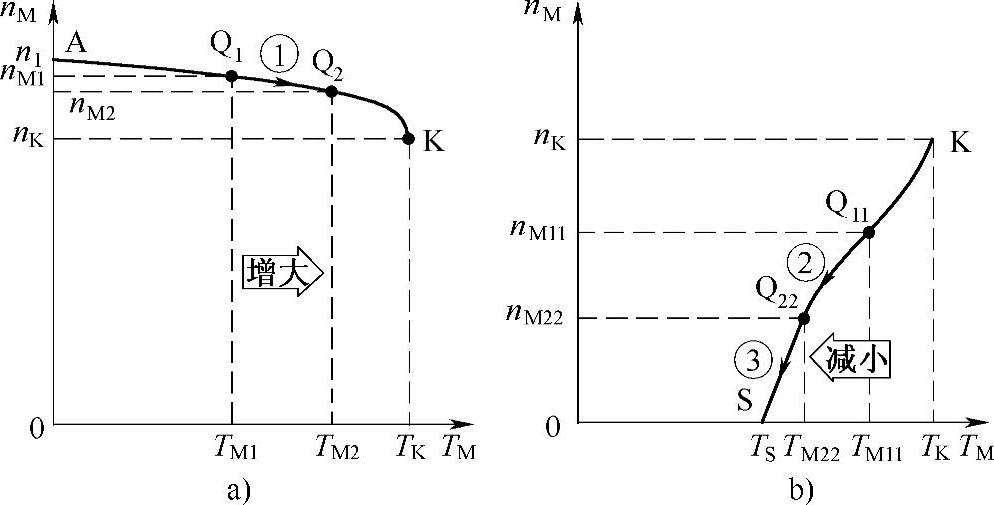
图3-13 拖动系统在负载加重后的状态
a)稳定运行区 b)不稳定运行区
2.不稳定运行区-KS段(见图3-13b)
假设拖动系统已经在Q11点运行:电磁转矩是TM11,转速是nM11。又假设由于某种原因,负载转矩由TL11增加为TL22,则因为
TM11<TL22→TJ<0
动态转矩为‘-’,拖动系统减速。可是,随着转速的下降,电磁转矩反而减小了。如图3-13b中之箭头②所示,当转速下降到nM22时,电磁转矩减小为TM22,更加带不动负载了,于是转速继续下降,如箭头③所示,直至停住为止。
那么,如果负载转矩减小了又如何呢?你来继续说吧。”
小李仿照着张老师所画的图3-13,画出了图3-14。然后说:“仿照着您方才的思路,说明如下:
(1)AK段 假设拖动系统已经在Q1点运行:电磁转矩是TM1,转速是nM1。根据转矩平衡的原理,这时的电磁转矩和负载转矩之间一定是平衡的:
TM1=TL1→TJ=0(https://www.xing528.com)
又假设由于某种原因,负载转矩由TL1减小为TL3,则因为
TM1>TL3→TJ>0
动态转矩为‘+’,拖动系统加速。随着转速的上升,电磁转矩减小,如图3-14a中之箭头①所示,当电磁转矩减小到TM3时,动态转矩为0,拖动系统又处于平衡状态,在新的工作点Q3继续运行,如图3-14a所示。所以,在AK段,负载的减轻只是使拖动系统增大了一点转速,但拖动系统能够正常运行。
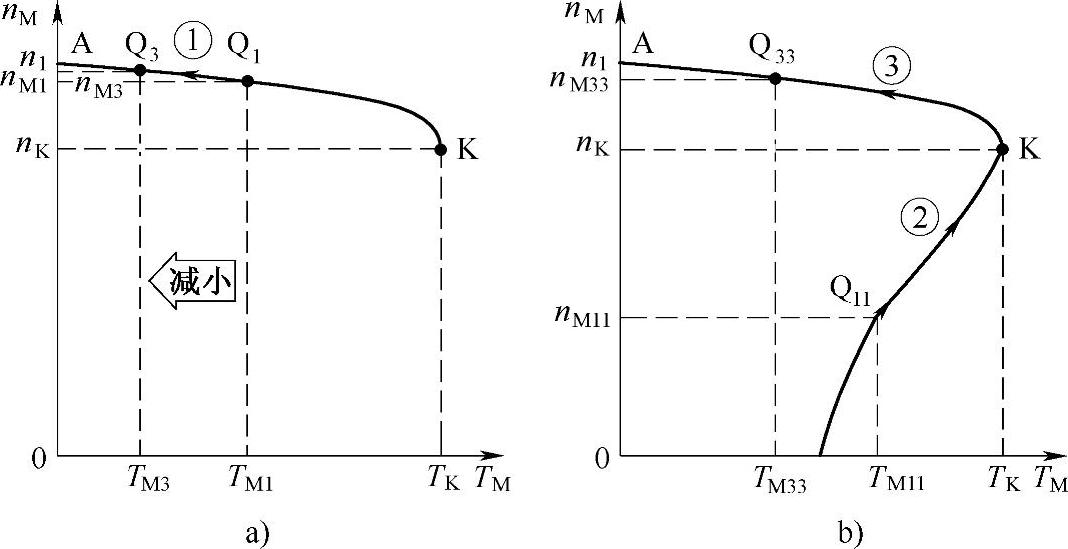
图3-14 拖动系统在负载减轻后的状态
a)稳定运行区 b)不稳定运行区
(2)KS段 假设拖动系统已经在Q11点运行:电磁转矩是TM11,转速是nM11。又假设由于某种原因,负载转矩由TL11减小为TL33,则因为
TM11>TL33→TJ>0
动态转矩为‘+’,拖动系统加速。可是,随着转速的上升,电磁转矩反而又增大了。如图3-13b中之箭头②所示,拖动系统的工作点将沿着Q11K转移,过了K点以后,转速再上升,电磁转矩将减小,如箭头③所示,直至减小为TM33时,拖动系统又进入稳定运行状态。但工作点已经转移到AK段了,说明在KS段,工作点是‘站不住’的。
所以,可以得出结论:异步电动机机械特性的AK段是稳定运行区,而KS段是不稳定运行区。”
张老师满意地说:“很好。在以上的分析中,磁通和电流都是以正弦量为前提的。而事实上,却存在着许多谐波成分的。这些谐波成分也会产生电磁转矩,称为附加电磁转矩,下面,我们就来讨论一下附加电磁转矩的问题。
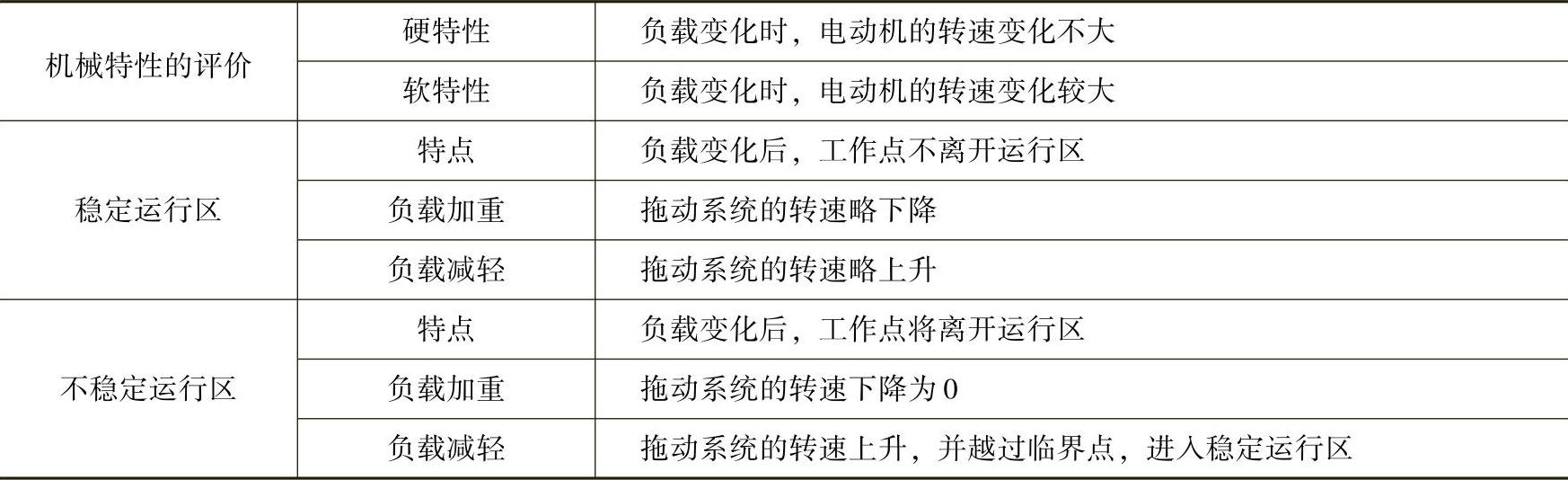
小李的归纳
机械特性分析

(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。