



无论我们在哪个层级去关注一个系统,控制子系统(控制器)的主要目的是产生信号,驱动(也可能通过人工干预的方式)被控过程,使得被控过程按照期望的方式运行。在控制子系统和被控过程间至少存在一种物理接口,在反馈环中有两个接口:传感器接口和执行器接口。
在有些情况下,这些接口只是直接的物理连接。例如,在瓦特的蒸汽机例子(例8.1)中,对飞球的位移与阀门位置的位移通过机械方式联系在一起,控制蒸汽的流动。
在其他例子中,控制器输出存在于不同的物理域,这些物理域存在于输入信号、被控对象或传感器中。传感器从物理域中将信号转换出来,对于互联的实现有着重要的作用。例如,控制器计算出代表下一时刻的输入信号,这个输入量必须转化为恰当的过程变量,如门的位置、电动机绕组的电压、力矩、电动机的转速或光波的强度等。在工程系统中,转换通常包括了电子器件和电气执行机构的使用,电气执行机构通过电动机连接到相对应的物理量范围内。在人体中也有相类似的过程,代表神经系统运动的电化学过程必须在运动发生前传递到肌肉组织。这一过程的发生通过肌肉神经接点的化学过程:运动神经元刺激突触释放出神经传导物质,然后传递到肌肉纤维的受体上,使肌肉产生收缩的反应。
基于控制目标、被控过程的知识(过程模型及其他关于干扰的相关信息)和测量数据,控制器可以计算出系统下一步所要执行的动作。
常见的控制目标包括:
●调节控制或扰动抑制,典型的例子为蒸汽机调速器。目标是在存在干扰的前提下保持转速在预定的水平,存在的干扰为由于燃烧器条件的变化导致蒸汽压力的变化。在灌溉系统(见3.3节)中,需要调节供应渠道的水位,使得农民有足够大的势能覆盖田地。在灌溉系统中,干扰是用水需求的变化。
●轨迹跟踪控制,典型的例子为射电望远镜(见3.4节)。目标是跟踪星球的位置,星球的位置相对于天文台随时间变化。外部干扰(如风)必须被抑制。跟踪往往也要考虑抑制干扰的要求。
●顺序控制,在启动或关闭阶段所必需的。在过程达到稳态前,调节或跟踪为主要目标。例如,在速度调节器能控制速度之前,蒸汽必须达到足够的温度和压力。从冷的条件下启动蒸汽机,需要一个事件序列:给锅炉充水,检查水位,启动燃烧器,打开空气阀,打开燃油阀,启动点火,检查燃烧,达到运行条件。在关闭蒸汽机的时候也需要类似的程序。在大部分过程中存在一个类似的程序以及应急程序。在灌溉系统中,渠道在启动时必须被注满水。雨水事件会导致渠道紧急关闭。射电望远镜在大风速情况下必须暂停避免损坏。在其他应用中,如间歇反应器、洗衣机或洗车,排序是主要的控制任务(见第3章中描述的应用)。
1)自适应控制,在出现重大变化的时候,仍然希望保持系统的性能,通常需要大幅度调整控制系统。由于控制动态发生变化,应该适当地调整控制子系统,以确保控制系统采取的行动是合适的。天线系统(见3.4节)的机械谐振频率随着天线指向角的变化而变化,影响到控制输入的允许带宽,控制器需要自适应地调整,以应对这一变化。
2)最优控制,有时需要优化某个变量,而不是调节某一变量至一个特定水平,如达到最大的效率,或最高功率输出。最优控制目标是使调节变量的导数为零。实现这种任务的具体控制算法已经存在,如极值搜索方法,与自适应控制和学习控制方法密切相关。
3)故障检测和过程重构,从监测被控过程的响应来识别报警条件,并且通过控制系统来采取相应的行动。在这种方式中,可以避免不安全的操作条件,满足紧急情况下的要求,或为操作员提供可行的操作指导。在某些情况下,报警可能需要重新配置控制系统,特别是当执行结构失效时。重新组合冗余的执行机构,控制系统基于故障检测和报警条件可以实现重构,以保证被控过程的安全运行。
4)监督控制,应用于在有许多层次控制的情况下,如大型供电网络。供电网络随着运行条件的变化而变化,或网络结构本身的变化(切换),或组件失效。对新的运行条件进行评估通常会导致需要对控制目标进行重新评估,以便确定其时时能有效保持。并基于这种评估,指导低层级的控制子系统动作。大型模拟和情景评价在控制设计中处于核心位置。
5)协调控制,通常是运行在最高层的控制任务,特别是存在清晰的控制子系统层次结构时。协调控制确保子系统正常协调工作。本地控制子系统指导和提供参考或设定值。在处理大型复杂过程的时候,每个子过程都有自己的目标,要与总体目标一致。协调控制确保局部目标实现,使得达到这整个过程的全局目标。它还有助于启动、关闭以及应急程序。(https://www.xing528.com)
6)学习控制,可以利用被控系统运行时收集的信息来实现学习过程。首先采集被控系统响应的新信息,随后学习与自适应控制技术捕捉到这一信息,方便以后使用,如优化被控过程的响应。学习过程应用于反馈控制中,会导致非常复杂的系统行为。目前,这种复杂行为仍然是不完全清楚的。即使对于最简单的例子,也不能被排除控制系统的混沌行为。针对不同的对象会催生出不同的控制方法和技术:从基于逻辑和基于事件的,到离散时间控制器,再到来源于人工智能思想的智能控制系统。就像诺伯特·维纳在他的著作Wiener(1961)所论述的那样,控制系统会模仿一些我们从自身行为体会到的经验。
不同的控制方式来自对自身的分析和设计工具。在现代应用中,都是协调运用多种技术达到预期的解决方案。迄今为止,控制工程理论和实践还没有发展到一个标准的软件“控制工程(4.13b)”,可以从问题的开始就引导我们选出合适的控制解决方案。
例子:
让我们重新讨论蒸汽机如图7-8,以及人在回路内的情形,如图8-4所示。
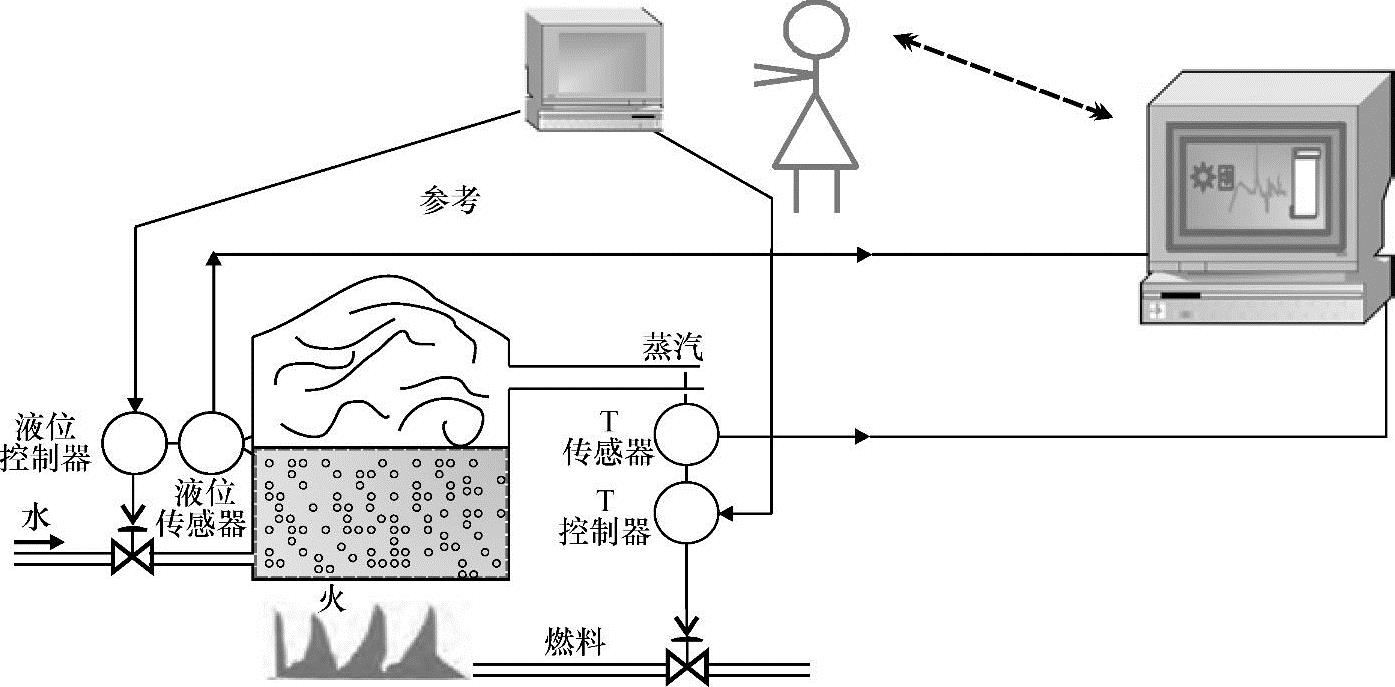
图8-4 水位和水温控制
我们主要的目标是制造满足需求的蒸汽,当然还要保持被控对象处于正常状态,也就是水位、合适的燃烧条件和安全的压力级别等。控制单元就是确保水位和水温都被正常的调节。
如图8-4所示,操作员可以通过显示面板去监视被控对象工作的全过程。操作员可以跟踪系统的变化,然后调节设置。他通过程序指令根据需要制造出不同的蒸汽产品(改变压力、温度、流量)。操作员同样可以引入逻辑程序,包括启动或停止,或者跳到待机模式。
在更为复杂的操作里,控制单元可以监督许多的运行环境,并且能够自动地改变被控对象或控制。例如,基于燃料的经济价格,火炉能够在气和油之间切换,或者控制目标能够在备用锅炉的等待模式和跟踪调节之间转换,甚至调节子系统的控制器实现蒸汽流量动态变化时,调节水位高度。主控制器的从属控制器目标是在环境许可的烟道煤气范围内,将锅炉的效益最大化。
控制系统必须能够对故障作出反应,例如,紧急开关会在水位过低的情况下关闭锅炉,以至于不对锅炉本体造成物理伤害。
在第3章中,我们描述了所有上述系统可以预见的相似状况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。