



【摘要】:假定我们想要被控过程与给定模型有相似的输出响应。模型参考自适应系统利用模型和过程输出的偏差来调节控制器参数减小偏差。现在,自适应控制可以处理远比当初MIT规则设想更多的复杂度,也促进了其发展。Landau提出的方法将模型参考方法一般化,他将从过程输出获得的信息和从闭环参考模型获得的信息进行比较。如图10-8所示的自适应机构会根据被控过程输出误差的估算来计算并更新的控制器参数。图10-8 自适应控制:模型参考自适应,MRAS
假定我们想要被控过程与给定模型有相似的输出响应。模型参考自适应系统(MRAS)(Landau 1979)利用模型和过程输出的偏差来调节控制器参数减小偏差。控制器参数和调整机制可以简单,也可以复杂。
MIT规则(Mareels和Polderman 1994)第一次提出是为了对单一参数进行自动补偿,这个参数反映了过程时变的要素(可能是非线性因素导致的),如图10-7所示。通过一个可调的控制参数来补偿这个参数。参数的调节是根据过程输出偏离理想输出的多少进行的(在这里假定模型的其他部分是已知的),调节这个参数是为了将误差平方的积分最小化。

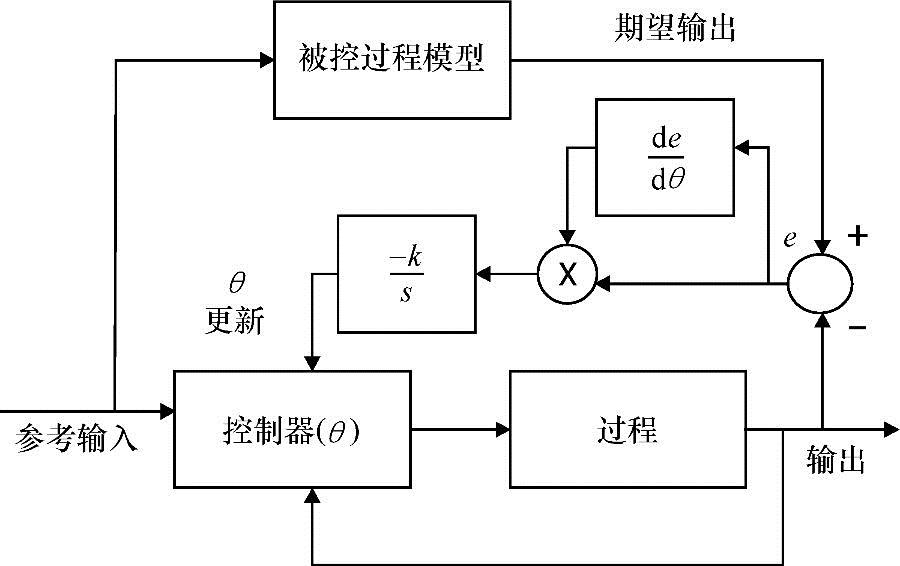
图10-7 一个简单的MIT规则自适应控制律(https://www.xing528.com)
然而,这个控制律并不像看起来那么简单。它的动态特性和被控系统的动态特性很丰富,时至今日也只有理解其中的一部分(虽然关于这个问题有相当多的文献)。只要遵守时间尺度分离的假设,它的性能还是可以接受的,并且很直观。
现在,自适应控制可以处理远比当初MIT规则设想更多的复杂度,也促进了其发展。Landau提出的方法将模型参考方法一般化,他将从过程输出获得的信息和从闭环参考模型获得的信息进行比较。如图10-8所示的自适应机构会根据被控过程输出误差的估算来计算并更新的控制器参数。
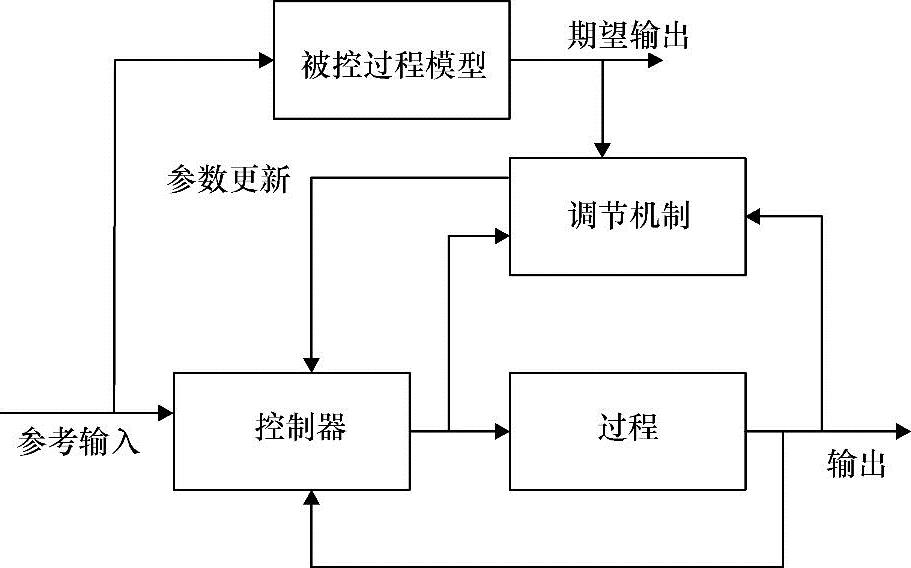
图10-8 自适应控制:模型参考自适应,MRAS
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。