



1.与步进电动机有关的实验
在说明步进电动机工作原理前,先来分析如图10-46所示的实验现象。
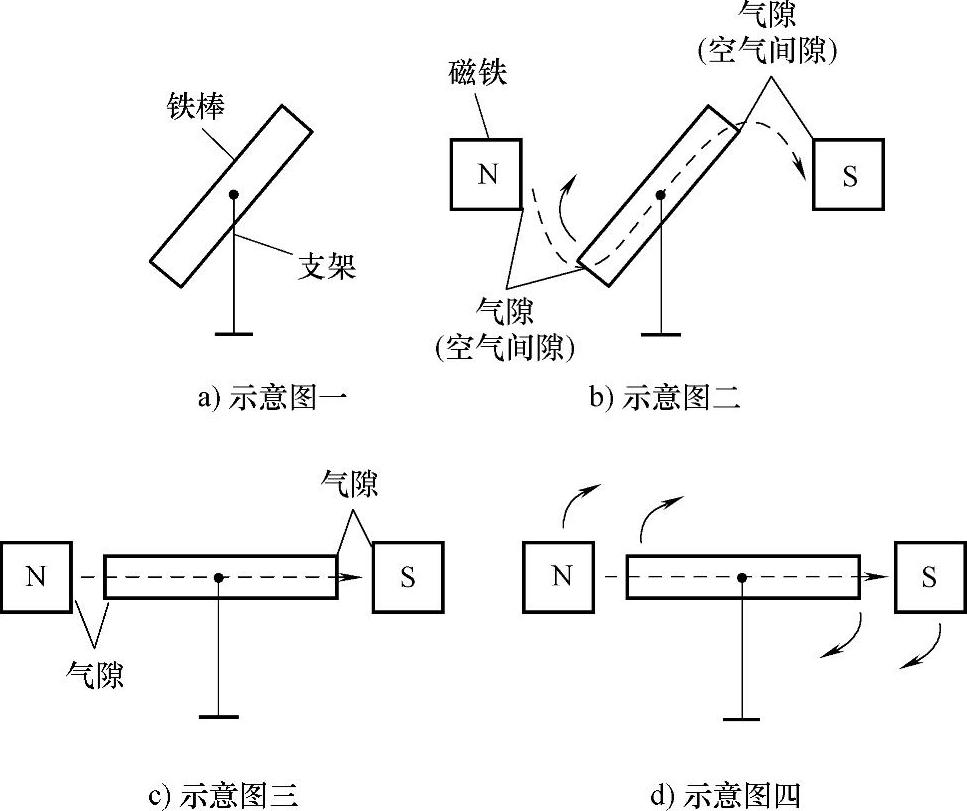
图10-46 与步进电动机有关的实验现象
在图10-46所示实验中,一根铁棒斜放在支架上,若将一对磁铁靠近铁棒,N极磁铁产生的磁力线会通过气隙、铁棒和气隙到达S极磁铁,如图10-46b所示。由于磁力线总是力图通过磁阻最小的途径,它对铁棒产生作用力,使铁棒旋转到水平位置,如图10-46c所示,此时磁力线所经磁路的磁阻最小(磁阻主要由N极与铁棒的气隙和S极与铁棒间的气隙大小决定,气隙越大,磁阻越大,铁棒处于图示位置时的气隙最小,因此磁阻也最小)。这时若顺时针旋转磁场,为了保持磁路的磁阻最小,磁力线对铁棒产生作用力使之也顺时针旋转,如图10-46d所示。
2.工作原理
步进电动机种类很多,根据运转方式可分为旋转式、直线式和平面式,其中旋转式应用最为广泛。旋转式步进电动机又分为永磁式和反应式。永磁式步进电动机的转子采用永久磁铁制成,反应式步进电动机的转子采用软磁性材料制成。由于反应式步进电动机具有反应快、惯性小和速度高等优点,因此应用很广泛。
(1)反应式步进电动机
图10-47是一个三相六极反应式步进电动机结构示意图。它主要由凸极式定子、定子绕组和带有4个齿的转子组成。
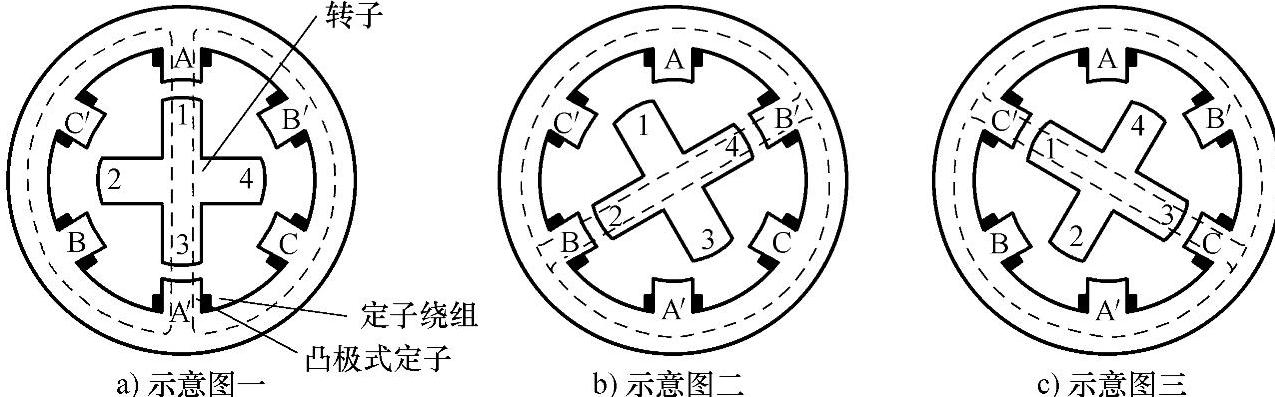
图10-47 三相六极反应式步进电动机结构示意图
反应式步进电动机工作原理分析如下:
1)当A相定子绕组通电时,如图10-47a所示,绕组产生磁场,由于磁场磁力线力图通过磁阻最小的路径,在磁场的作用下,转子旋转使齿1、3分别正对A、A′极。
2)当B相定子绕组通电时,如图10-47b所示,绕组产生磁场,在绕组磁场的作用下,转子旋转使齿2、4分别正对B、B′极。
3)当C相定子绕组通电时,如图10-47c所示,绕组产生磁场,在绕组磁场的作用下,转子旋转使3、1齿分别正对C、C′极。
从图中可以看出,当A、B、C相按A→B→C的顺序依次通电时,转子逆时针旋转,并且转子齿1由正对A极运动到正对C′;若按A→C→B顺序通电,转子则会顺时针旋转。给A、B、C相绕组依次通电时,步进电动机会旋转一个步距角;若按A→C→B→A→B→C→…顺序依次不断给定子绕组通电,转子就会连续不断地运转。图10-48中的电动机为三相单三拍反应式步进电动机,其中“三相”是指定子绕组为三相,“单”是指每次只有一相绕组通电,“三拍”是指在一个通电循环周期内绕组有3次供电切换。
步进电动机的定子绕组每切换一相电源,转子就会旋转一定的角度,该角度称为步距角。在图10-47中,步进电动机定子圆周上平均分布着6个凸极,任意两个凸极之间的角度为60°,转子每个齿由一个凸极移到相邻的凸极需要前进两步,因此该转子的步距角为30°。步进电动机的步距角可用下面的公式计算:
θ=360°/ZN(https://www.xing528.com)
式中,Z为转子的齿数;N为一个通电循环周期的拍数。
图10-56中的步进电动机的转子齿数Z=4,一个通电循环周期的拍数N=3,则步距角θ=30°。
(2)三相单双六拍反应式步进电动机
三相单三拍反应式步进电动机的步距角较大,稳定性较差,而三相单双六拍反应式步进电动机的步距角较小,稳定性较好。三相单双六拍反应式步进电动机结构示意如图10-48所示。
三相单双六拍反应式步进电动机工作原理分析如下:
①当A相定子绕组通电时,如图10-48a所示,绕组产生磁场,由于磁场磁力线力图通过磁阻最小的路径,在磁场的作用下,转子旋转使齿1、3分别正对A、A′极。
②当A、B相定子绕组同时通电时,绕组产生图10-48b所示的磁场,在绕组磁场的作用下,转子旋转使齿2、4分别向B、B′极靠近。
③当B相定子绕组通电时,如图10-48c所示,绕组产生磁场,在绕组磁场的作用下,转子旋转使2、4齿分别正对B、B′极。
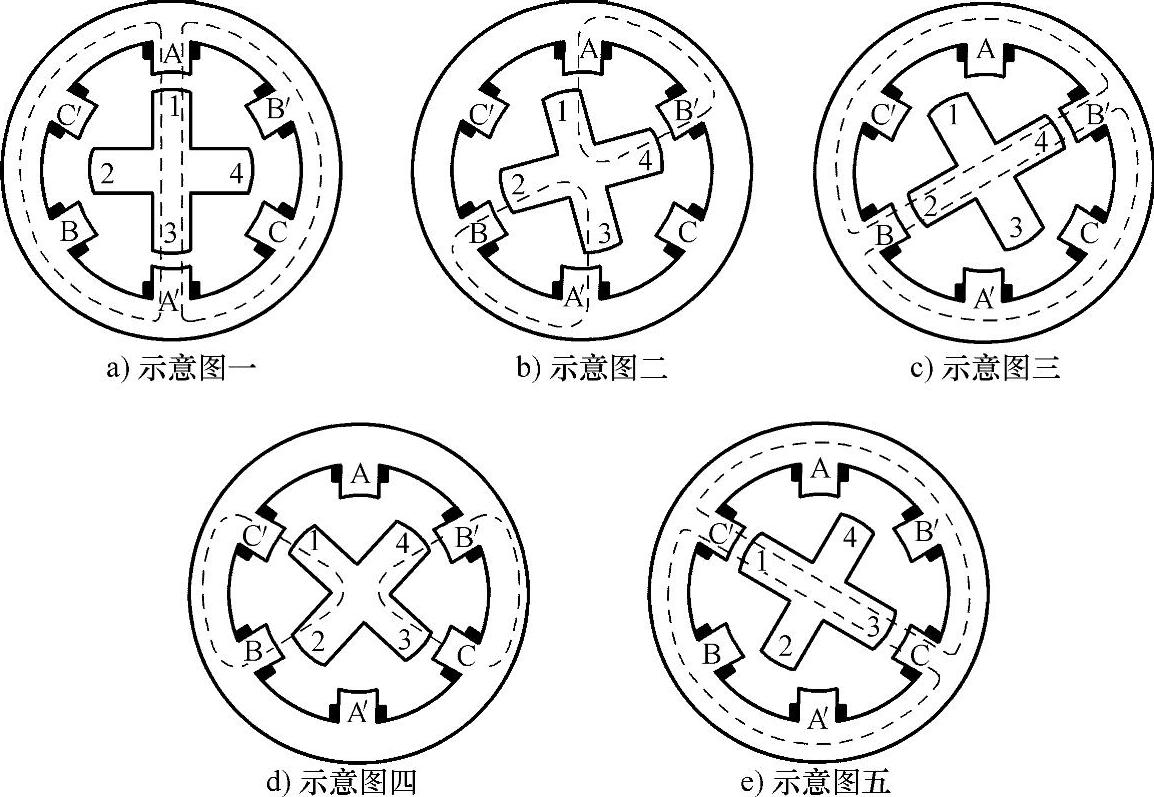
图10-48 三相单双六拍反应式步进电动机结构示意图
④当B、C相定子绕组同时通电时,如图10-48d所示,绕组产生磁场,在绕组磁场的作用下,转子旋转使齿3、1分别向C、C′极靠近。
⑤当C相定子绕组通电时,如图10-48e所示,绕组产生磁场,在绕组磁场的作用下,转子旋转使3、1齿分别正对C、C′极。
从图中可以看出,当A、B、C相按A→AB→B→BC→C→CA→A…的顺序依次通电时,转子逆时针旋转,每一个通电循环分6拍,其中3个单拍通电,3个双拍通电,因此这种反应式步进电动机称为三相单双六拍反应式步进电动机。三相单双六拍反应式步进电动机的步距角为15°。
(3)结构
不管是三相单三拍步进电动机还是三相单双六拍步进电动机,它们的步距角都比较大,若用它们作为传动设备动力源往往不能满足精度要求。为了减小步距角,实际的步进电动机通常在定子凸极和转子上开很多小齿,这样可以大大减小步距角。三相步进电动机的实际结构如图10-49所示。
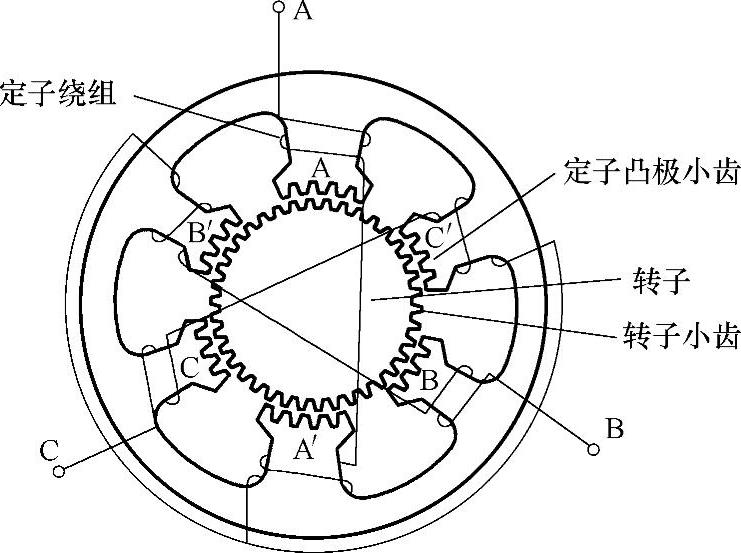
图10-49 三相步进电动机的实际结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。