



Hy-Vo齿形链与链轮的正确啮合是实现Hy-Vo齿形链传动高效率、低噪声特性的重要条件。目前国内外相关文献均未涉及这一研究领域,只是在给定的Hy-Vo齿形链与链轮主要参数的条件下进行其运动学与动力学分析,或者是在给定的Hy-Vo齿形链与链轮主要参数的条件下进行链轮的渐开线齿形设计。由于上述文献未能提出并研究Hy-Vo齿形链与链轮的正确啮合条件,因而很难实现Hy-Vo齿形链与链轮的正确啮合设计,特别是对于Hy-Vo齿形链传动中常常遇到的链板齿形角不等于渐开线链轮压力角时的正确啮合条件,上述文献均未涉及。由此可见,研究Hy-Vo齿形链与链轮的正确啮合条件,具有十分重要的学术价值和实用意义。
为此,提出了Hy-Vo齿形链与链轮的正确啮合条件这一概念,并从分析研究Hy-Vo齿形链-链轮-刀具齿条的啮合与滚切原理入手,研究了三者的正确啮合条件,提出了切实可行的啮合设计方法并进行了相关的啮合设计。
Hy-Vo齿形链-链轮-刀具齿条的啮合关系如图4-31所示。设Hy-Vo齿形链链板的齿形半角为α,基本节距为p,基准边心距为f,假想的Hy-Vo齿形链初始节距为p0,假想的对应于初始节距p0时的Hy-Vo齿形链的初始边心距为f0;链轮齿数为z,链轮节距为p1,链轮压力角为α1;链轮滚刀的法向齿形角为α2,法向齿距为p2。
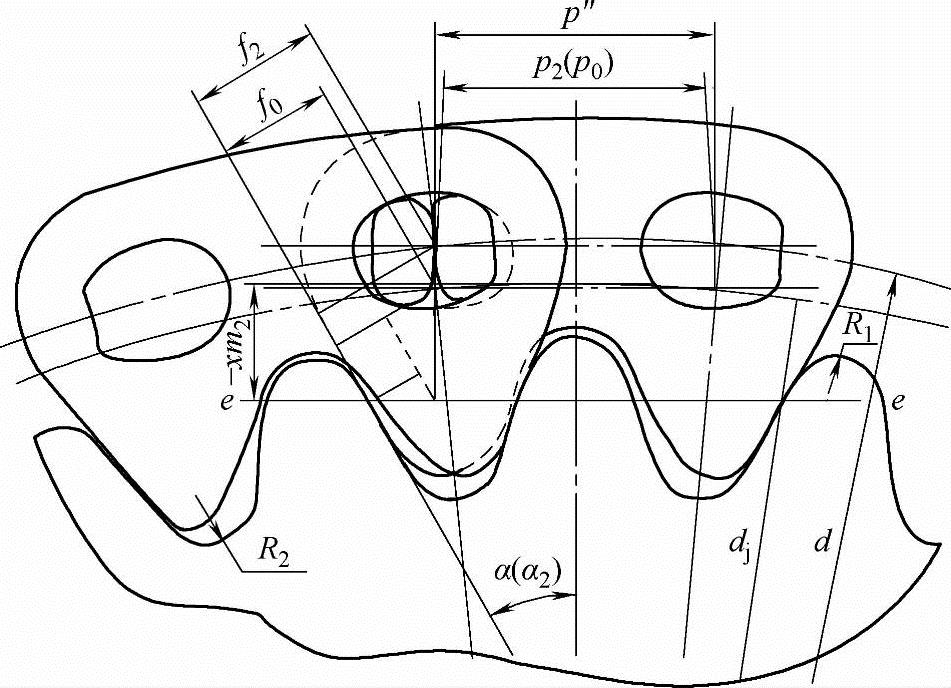
图4-31 Hy-Vo齿形链-链轮-刀具齿条啮合示意图
由图4-31可以看出,链轮滚刀加工链轮可视为刀具齿条与链轮的啮合,此时,刀具齿条(p2,α2)与链轮(p1,α1)的啮合即是Hy-Vo齿形链(p0,α,f0)与链轮(p1,α1)的啮合。
通常,α2=α1=α,p2=p1=p,因而可直接按满足Hy-Vo齿形链与链轮的正确啮合条件的式(4-17)来计算刀具齿条(p2,α2)在加工链轮(p1,α1)时的变位系数x。
应该指出,对于Hy-Vo齿形链传动,往往Hy-Vo齿形链链板的齿形半角不等于链轮的压力角,即α≠α1,此时,应从分析研究Hy-Vo齿形链-链轮-刀具齿条的啮合与滚切原理入手,建立三者的正确啮合条件。
目前,Hy-Vo齿形链链板的齿形半角常取α=30°,而与之相啮合的链轮压力角常取α1=31.5°。而由图4-18可知,满足Hy-Vo齿形链与链轮的正确啮合条件的式(4-17)是在加工链轮的滚刀法向齿形角等于Hy-Vo齿形链链板齿形半角(α2=α)的条件下建立的,当α1≠α时,则必须通过参数变换才能利用式(4-17)求出刀具齿条(p2,α2)在加工链轮(p1,α1)时的变位系数,而不能直接令α2=α1、p2=p1来求解其变位系数。(https://www.xing528.com)
由啮合与滚切原理可知,为满足Hy-Vo齿形链链轮与刀具齿条的共轭啮合条件,必须满足p1cosα1=p2cosα2。当α1≠α时,可令滚刀法向齿形角等于Hy-Vo齿形链链板齿形半角,即令α2=α,则滚刀法向齿距 。此时,以变换后的p2,α2代入式(4-17)求出对应于刀具齿条(p2,α2)的变位系数,而被加工的链轮参数为(p1,α1),从而建立了Hy-Vo齿形链-链轮-刀具齿条的啮合设计体系。
。此时,以变换后的p2,α2代入式(4-17)求出对应于刀具齿条(p2,α2)的变位系数,而被加工的链轮参数为(p1,α1),从而建立了Hy-Vo齿形链-链轮-刀具齿条的啮合设计体系。
求出刀具齿条的变位系数后,可按式(4-20)计算出被加工链轮的量柱测量距为偶数齿 奇数齿
奇数齿 式中:m2为滚刀模数,
式中:m2为滚刀模数, ;αB为通过量柱中心的渐开线压力角(见图13-11)。
;αB为通过量柱中心的渐开线压力角(见图13-11)。

式中,dR为量柱直径。
应该指出,在Hy-Vo齿形链传动的设计和制造过程中,当已知Hy-Vo齿形链(p,α,f)和链轮(p1,α1)的主要参数,且α1≠α时,通常习惯取滚刀的主要参数为p2=p1、α2=α1,此时可利用式(4-21)求出对应于刀具齿条p2=p1、α2=α1的变位系数为

必须指出,式(4-21)中的invαB也是先通过上述参数变换的方法利用式(4-17)和式(4-20)计算出来的,则利用式(4-21)求出的变位系数为x1的链轮(p1,α1),必然满足与Hy-Vo齿形链(p,α,f)的正确啮合条件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。