



下面对上述三种仿真模型在工频电网供电下PMSM直接起动过程进行对比分析和验证。
仿真用的电动机额定参数:额定电压为220V(相电压有效值)、额定转速为3000r/min、额定输出转矩为3N·m,定子绕组电阻R1为2.875Ω,直轴电感Ld为8.5mH,交轴电感Lq为8.5mH,转子永磁体在定子绕组中产生的磁链ψf为0.175Wb,机组转动惯量J为0.0008kg·m2,转轴处摩擦系数μf为0N·m·s,极对数np为4。仿真中设置电动机A、B、C三相相电压分别为:

各仿真程序的设置如下:
(1)使用分立模块构建的PMSM模型(PMSM_nonS)构成的仿真程序
系统模型如图4-14所示。在仿真参数设置对话框(Simulation菜单下的Configuration Pa-rameters)中设置仿真起始时间(Start time)为0.0秒,仿真停止时间(Stop time)为1.0秒。微分方程解算器选项(Solver options)中设置类型(Type)为可变步长(Variable-step),种类为ode45s(Dormand-Prince),最大时间步长(Max step size)设置为1e-5秒,其他可保留为默认值。三相定子绕组的相电压由正弦波(Sine Wave)模块提供,运行仿真,用观察器(Scope)模块观察各项输出。
(2)使用S函数构建的PMSM模型(PMSMdqS)构成的仿真程序
仿真系统的模型与图4-14基本相同,只不过其中的PMSM模块采用了图4-18所示的s函数模块。运行仿真,用观察器(Scope)模块观察各项输出。
(3)使用电力系统中的PMSM模块构成的仿真程序
仿真程序如图4-27所示。在仿真参数设置对话框中设置仿真起始时间(Start time)为0.0秒,仿真停止时间(Stop time)为0.2秒。由于系统包含非线性因素(nonlinear element),所以微分方程解法选项(Solver options)中设置类型(Type)为可变步长(Variable-step),解算器种类为ode15s(stiff/NFD),最大时间步长(Max step size)设置为1e-5秒,其他可保留为默认值。
三相定子绕组的端电压由三个如图4-28所示的正弦波(Sine Wave)模块提供,简单处理得到线电压后输入到受控电压源模块(图4-27中Controlled Voltage Source和controlled Voltage Source1),然后作为电力系统库PMSM模块的输入。同时用电压测试模块(图中vbc)测试BC之间的线电压。电动机输出的各项值用电动机测量分解模块(Machines Measurement Demux)输出到观察器(Scope)模块。(https://www.xing528.com)
运行仿真,用观察器(Scope)模块观察电动机转速、电动机转矩、dq轴定子电流的输出波形。
为了更好地对比分析三种不同建模方法的仿真结果,图4-29将三种建模方法放置在同一个mdl文件中。图中Scope3显示的仿真波形绘制在图4-30中。
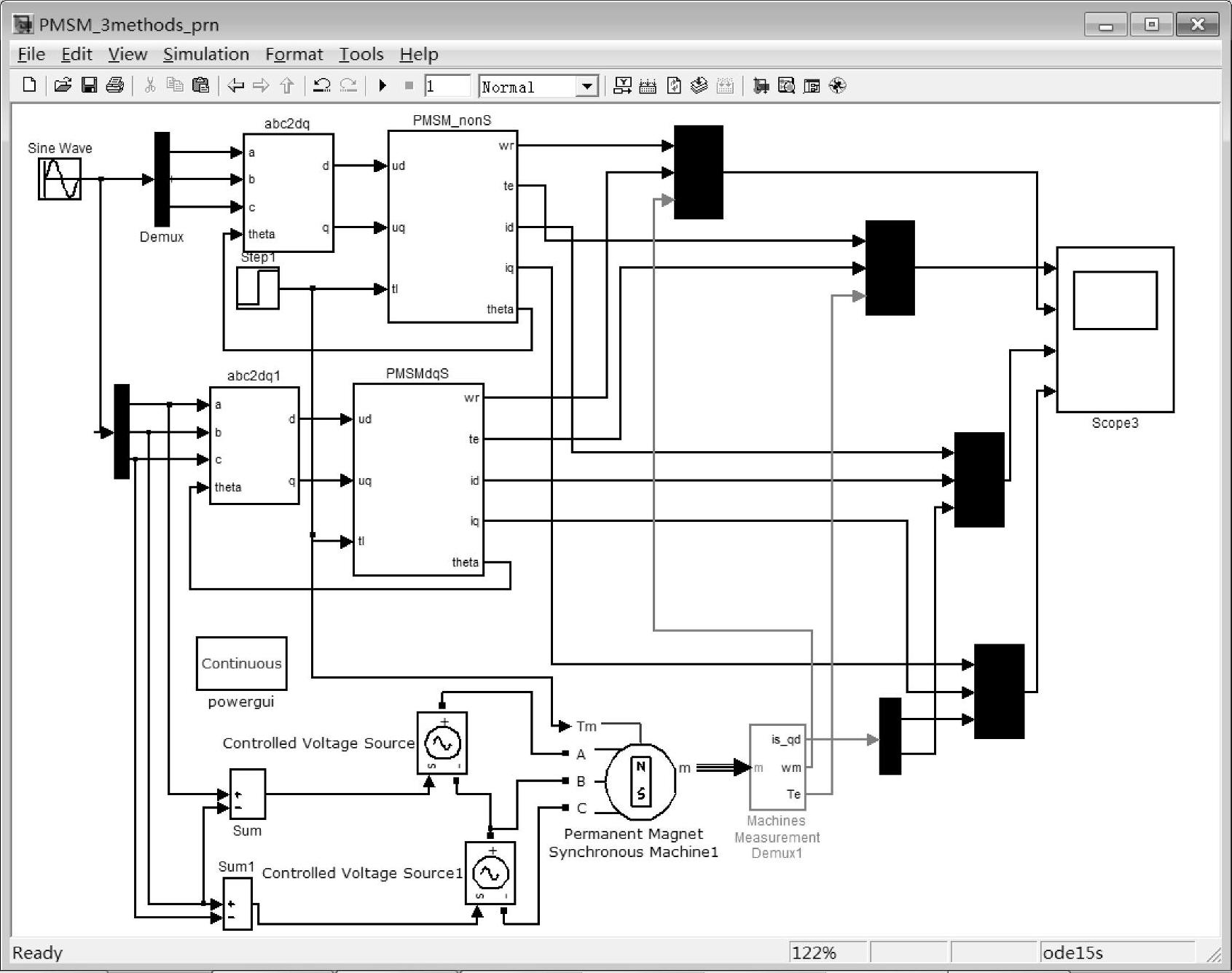
图4-29 三种建模方法同时仿真对比的模型
图4-30中的波形从上到下分别是电动机的转速wr、电动机的电磁转矩te、id与iq,可以看出图4-30a、图4-30b中三种不同颜色的曲线基本完全重合,这说明建立的三种仿真模型是正确有效的。

图4-30 正弦电压供电的PMSM仿真波形图
a)1s内的仿真波形 b)前0.2s内的放大仿真波形
从图4-30中的仿真波形还可以看出,当工频电网供电时,在电动机起动的前期,电动机转速有很大的振荡,不过最终还是可以稳定在同步机械角速度79rad/s≈50×2π/4。这是因为电动机的转动惯量很小,转子速度可以较快地跟随同步速度,如果是惯量较大的电动机就不能顺利起动了。另外还可以看出,即便电动机可以起动,但是起动过程中速度存在很大的振荡,存在着一定程度的失步现象——这是因为定子磁场的频率太高,所以它与转子永磁体作用产生的加速转矩时正时负,但是平均转矩还是正的。为了获得更好的起动性能,可以在转子上加入阻尼绕组,形成异步起动同步电动机;或者采用变频起动,后面章节中结合磁场定向矢量控制技术和直接转矩控制技术深入研究PMSM的变频调速控制技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。